

Abstract
Flexible endoscopes are widely used in minimally invasive surgical robot systems. Various kinematic models have been developed for describing the deformation of such endoscopes. For joint-type flexible endoscopes, most existing models neglect the effect of internal friction and cannot precisely show the shape.
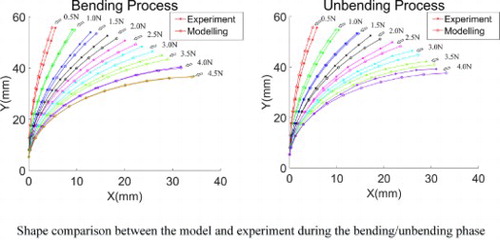
In this paper, we propose a new nonlinear bending model. The rubber tube and metal net at each joint are approximated as a tube under elastic deformation and are assigned an equivalent bending stiffness. The internal friction force is also taken into account to build the moment balance equation at each joint. Groups of experiments were performed to validate the nonlinear model. The results closely confirm the model’s predictions. The model’s tip position error during the bending and unbending phases are 1.48 ± 0.99 mm and 1.68 ± 0.91 mm respectively; the bending angle errors are −5.50 ± 2.54° and 1.68 ± 3.66°, respectively The model can also take account of the hysteresis effect of the bending, which is quite common for cable-driven flexible robots. Moreover, the model has good computational efficiency, making it suitable for real-time control.
GRAPHICAL ABSTRACT
Acknowledgements
The authors would like to thank Yanmin Li for his help in the experiments. And this work was supported in part by The National Key R&D Program of China (2017YFC0110902) and Self-planned Project from State Key Laboratory of Robotics in China (No. 2019-Z05)
Disclosure statement
No potential conflict of interest was reported by the authors.
ORCID
Yuanyuan Zhou http://orcid.org/0000-0002-4402-910X
Additional information
Funding
Notes on contributors
Yuanyuan Zhou
Yuanyuan Zhou received the B.S from the Huazhong University of Science and Technology, Wuhan, China, in 2008 and M.S. from the Harbin Institute of Technology in mechanical and electronic engineering, Harbin, China, in 2010. He is currently pursuing the Ph.D. degree with the State Key Laboratory of Robotics, Shenyang Institute of Automation, Chinese Academy of Sciences, Shenyang, China, and the University of Chinese Academy of Sciences, Beijing, China. He is also an Associate Professor with the Shenyang Institute of Automation. His research interests include surgical robots, medical sensor and robot control.
Guohao Jiang
Guohao Jiang received the B.S degree in Mechanical Engineering from Zhengzhou University in China, in 2017. Currently, he is a M.S. student with the State Key Laboratory of Robotics, Shenyang Institute of Automation, Chinese Academy of Sciences, Shenyang, China, and the University of Chinese Academy of Sciences, Beijing, China. His research interests include medical robots and system, continuum robots, robotics modeling and control.
Cheng Zhang
Cheng Zhang received the B.S. degree from Tianjin University, Tianjin, China, in 2006, the PhD degree from University of Chinese Academy of Sciences, Beijing, China, in 2013. Currently, he is an Associate Professor with the Shenyang Institute of Automation, Chinese Academy of Sciences , Shenyang, China. His research interests include the technologies and systems of surgical robots, almost of which are used for digestive and urological surgery.
Zhidong Wang
Zhidong Wang received the B.S. degree from the Beijing University of Aeronautics and Astronautics, Beijing, China, in 1987, the M.Sc. and Ph.D. degrees in engineering from the Graduate School of Engineering, Tohoku University, Sendai, Japan, in 1992 and 1995, respectively. Currently, he is a Professor with the Department of Advance Robotics, Chiba Institute of Technology, Chiba, Japan. His current research interests include human-robot interaction and cooperation systems, distributed autonomous robot systems, micro/nano robotics, and application of intelligent robot technologies for the disabled.
Zhongtao Zhang
Zhongtao Zhang received the Ph.D. degree in surgery from Capital Medical University,Beijing, China, in 1987. Currently, he is a professor, doctoral tutor and vice president with the Beijing Friendship Hospital, Beijing. His research interests include clinical and basic research in single-incision laparoscopic surgery, weight loss and metabolic surgery and oncology surgery.
Hao Liu
Hao Liu received the B.S., M.S., and Ph.D. degrees in mechanical engineering from the Harbin Institute of Technology in China, in 2004, 2006, and 2010, respectively. He worked as a visiting scholar in Laboratory for Computational Sensing and Robotics, Johns Hopkins University, United States of America from 2014-2015. Currently, he is an professor with Shenyang Institute of Automation, Chinese Academy of Sciences , Shenyang, China. His research interests include surgical robots, medical sensors, surgical navigation and robot control.