

Abstract
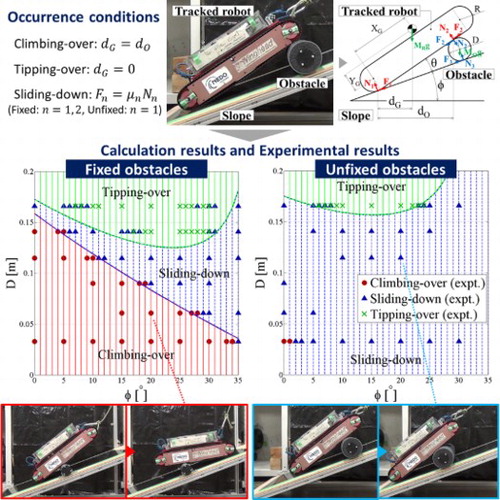
When a tracked robot explores a volcanic environment, it faces difficulty in climbing over unfixed obstacles such as loose rocks on the ground. Such unfixed obstacles sometimes cause the sliding-down or tipping-over of the robot. Although such phenomena should be avoided for the success of the mission, they have not been sufficiently studied yet. Therefore, this research aims at understanding the phenomena for a tracked vehicle climbing an unfixed obstacle on a slope, and considers the conditions of climbing-over, tipping-over, and sliding-down. To simplify the problem, a model of a single track and circular cross-section obstacle is used in this research. The climbing-over and tipping-over conditions are derived from the geometric relationship, and the sliding-down condition is derived from statics. Moreover, some experiments using an actual robot are conducted to verify the validity of the conditions. The results show that the derived conditions are reasonable. Furthermore, it is revealed that unfixed obstacles typically tend to slide down more than fixed obstacles because of the number of contact points that can support a robot.
GRAPHICAL ABSTRACT
Disclosure statement
No potential conflict of interest was reported by the authors.
Additional information
Notes on contributors
Ryosuke Yajima
Ryosuke Yajima received the ME from Tohoku University in 2015. Currently, he is a PhD candidate at the Graduate School of Engineering, Tohoku University. His research interest is field robotics, volcano exploration robots, and improvement of traversal ability for mobile robots. He is a Member of the RSJ.
Keiji Nagatani
Keiji Nagatani received his PhD from the University of Tsukuba in 1997. He was a postdoctoral fellow at Carnegie Mellon University from 1997 to 1999, a lecturer at Okayama University from 1999 to 2005, and an associate professor at Tohoku University from 2005 to 2019. Currently, he is a specially appointed professor at the University of Tokyo from 2019. His research interest is field robotics, which includes improvement of traversal ability for all terrain robots, the autonomy of inspection robots, and intelligent functions for construction machines. He is a Member of the RSJ, SICE, JSME, JSASS and IEEE.
Yasuhisa Hirata
Yasuhisa Hirata is a Professor in the Department of Robotics at Tohoku University, Sendai, Japan. He received the BE, ME and PhD degrees in mechanical engineering from Tohoku University, Sendai, Japan in 1998, 2000 and 2004, respectively. From 2000 to 2006, he worked as a research associate at Tohoku University. From 2002 through 2004, he was a researcher at Precursory Research for Embryonic Science and Technology (PRESTO), Japan Science and Technology Agency (JST). From 2006 to 2016, he was an associate professor at Tohoku University. He received the Young Investigator Excellence Award of the Robotics Society of Japan in 2001, the JSME Award for best paper from the Japan Society of Mechanical Engineers in 2005, the Best Paper Award of the Robotics Society of Japan in 2005, the Original Paper Award of the FANUC FA and Robot Foundation in 2006, and the Young Scientists' Prize, The Commendation for Science and Technology by the Minister of Education, Culture, Sports, Science and Technology in 2014, His Research interests include intelligent control of multiple mobile robots in coordination, human-robot cooperation system, Assitive Robot and Haptics. He is a member of IEEE, RSJ, SICE and JSME.