

Abstract
This paper proposes a marker-based motion capture system for rat motion detection and gait analysis. Motion capture in small animals such as rodents is more challenging than in humans because of their small bodies and rapid motion. Existing algorithms have poor applicability in rat motion capture in environments outside the studio. Moreover, gait analysis targeting on the rat is not performed by existing motion capture software. Our method consists of four procedures. First, Region of Interest (ROI) is extracted from the background using the inter-frame difference method and a depth filter. Second, a double-threshold marker detection method is used to detect markers in ROI and a marker shape filter is used to classify the markers. Third, a marker corrector is designed to modify missing and incorrect markers. Finally, a deep learning network is used to analyse the gait trajectory to classify rat as healthy, injured, or rehabilitated. The experimental result shows that marker recognition accuracy is 99.33%, higher than that of most existing software. The validation accuracy of the network is 100% and the loss is 0.0001. This method is conductive to the development of motion capture systems for small animals and research into the gait kinematics of rodents.
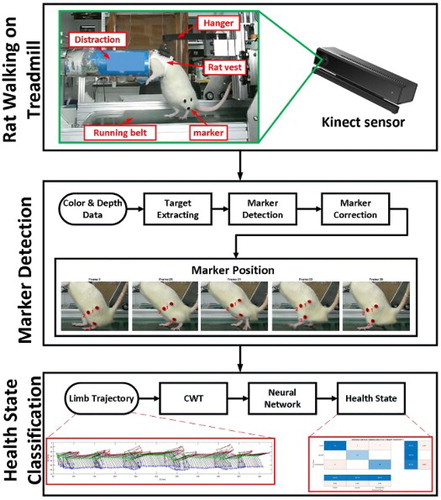
GRAPHICAL ABSTRACT
Disclosure statement
No potential conflict of interest was reported by the authors.
Additional information
Funding
Notes on contributors
Chuankai Dai
Chuankai Dai received B.S. degree in Automation from Beijing Institute of Technology, Beijing, PRC, in 2014 and M.S. degree in Information Science from Waseda University, Fukuoka, Japan, in 2016. He is currently a PhD candidate in Beijing Institute of Technology. His research interests include image processing with artificial neural network, neural signal decoding/encoding, and electrical stimulation for recovery of function.
Xiaodong Lyu
Xiaodong Lyu received the B.S. degree from Shandong University of Science and Technology in 2015, he is currently M.S. student in Beijing Institute of Technology and he is working for Beijing Advanced Innovation Center for Intelligent Robots and Systems as an assistant researcher. His research interests include the assessment of passive haptic stimuli and coupled control of mechanical and electrical systems for haptic applications in teleoperation, proprioception for upper-limb prostheses, and spike neural network for haptic feedback.
Fei Meng
Fei Meng received the B.S. and Ph.D. degrees in Mechatronics Engineering from the Beijing Institute of Technology (BIT), China, in 2008 and 2016, respectively. He was a visiting student with the Department of Mechanical Engineering and Intelligent Systems, The University of Electro-Communications, Japan, in 2015. He is currently a postdoctoral researcher with the School of Mechatronics Engineering, BIT
Jiping He
Jiping He (S'86-M'89-SM'97) received the B.S. degree in Control Engineering from Huazhong University of Science and Technology, Wuhan, China, in 1982, and the M.S. and Ph.D. degrees in Electrical Engineering from University of Maryland, College Park, MD, USA, in 1984 and 1988, respectively. He joined Arizona State University, Tempe, AZ, USA, as Associate Professor, in 1994, where is now Professor of Bioengineering, Director of Center for Neural Interfaces Design. He joined Beijing Institute of Technology in 2016. His research interests include the implantable neural interface technology, cortical and spinal cord recording and stimulation for sensorimotor adaptation, application of robotics and virtual reality research to neuromotor rehabilitation and prosthetic devices.
Qiang Huang
Qiang Huang (SM'14-F'xx) received the B.S. and M.S. degrees in Electrical Engineering from the Harbin Institute of Technology, Harbin, China, in 1986 and 1989, respectively, and the Ph.D. degree in Mechanical Engineering from Waseda University, Tokyo, Japan, in 1996. In 1996, he joined the Mechanical Engineering Laboratory, Tsukuba, Japan. He was at the University of Tokyo, Tokyo, Japan, from 1999 to 2000. He is currently Professor and Director with the Intelligent Robotics Institute; Director with the Key Laboratory of Biomimetic Robots and Systems, Ministry of Education of China; Executive Director with the Beijing Advanced Innovation Center for Intelligent Robots and Systems; and Vice Director with the Key Laboratory of Intelligent Control and Decision of Complex System, Beijing Institute of Technology, Beijing, China. His current research interests include bio-robotic systems and human–robot fusion systems.
Toshio Fukuda
Toshio Fukuda (Life Fellow, IEEE) graduated from Waseda University, Tokyo, Japan, in 1971, and received the M.Eng. and D.Eng. degrees from the University of Tokyo, in 1973 and 1977, respectively. He studied at the Graduate School of Yale University from 1973 to 1975. He joined the National Mechanical Engineering Laboratory, Japan, in 1977, the Science University of Tokyo, in 1982, and then joined Department of Mechanical Engineering, Nagoya University, Japan, in 1989. He worked at the University of Stuttgart, as an Humboldt Fellow (1979–1981). He is Professor Emeritus of Nagoya University, and also Professor of Meijo University, Waseda University, and Beijing Institute of Technology. He has been working as Professor of the Shenyang University of Technology, Suzhou University, Institute of Automation, Chinese Academy of Science, Russell Springer Chaired Professor at UC Berkeley, Seoul National University, Advisory Professor of Industrial Technological Research Institute in Taiwan, and so on. He is Foreign Member of the Chinese Academy of Sciences (2017). He is mainly engaged in the research fields of intelligent robotic systems, micro and nanorobotics, bio-robotic system, and technical diagnosis and error recovery system. He was President of the IEEE Robotics and Automation Society (1998–1999), Director of the IEEE Division X, Systems and Control (2001–2002), Founding President of the IEEE Nanotechnology Council (2002–2005), Region 10 Director (2013–2014), Director of Division X, Systems and Control (2017–2018), and IEEE President-Elect (2019). He was Editor-in-Chief of the IEEE/ASME Transactions on Mechatronics (2000–2002). He was Founding General Chair of the IEEE International Conference on Intelligent Robots and Systems (IROS) held in Tokyo (1988). He was Founding Chair of the IEEE Conference on Nanotechnology (2001), IEEE Workshop on Robot and Human Communication (1994), IEEE Workshop on Advanced Robotics Technology and Social Impacts (ARSO, 2005), Founding Chair of the IEEE Workshop on System Integration International (SII, 2008), Founding Chair of the International Symposium on Micro-Nano Mechatronics and Human Science (MHS, 1990–2012), IEEE Conference on Cyborg and Bionic Systems (2017), and IEEE Conference on Intelligence and Safety of Robots (2018).