

Abstract
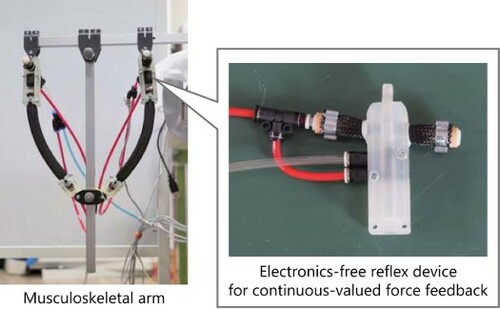
Solving the issue of implementation complexity due to the increase in wiring and peripheral circuits is crucial to implement highly autonomous decentralized systems, such as the reflex system of an animal. Our study reports a novel implementation method of electronic-free reflex systems for musculoskeletal robots. The main aim of our research is to build a continuous-valued feedback system of muscle force using only mechanical pneumatic devices without bulky and expensive electrical sensors, computers, or peripheral circuits. Our system, the pneumatic reflex device, requires only a single energy line from the center to perform the control function. In this study, experiments were performed using a single-joint musculoskeletal arm to evaluate the reflex device.
GRAPHICAL ABSTRACT
Disclosure statement
No potential conflict of interest was reported by the author(s).
Notes
1 We measured the threshold with a brief measuring device. When the output port closed, the force to push the switch (stops the air) was about 9.2 N, and that the push force to release it (let the air pass)
was about 2.5 N. See the fourth paragraph of the discussion for the effect of this hysteresis existing between ON and OFF.
2 Note that there is a slight error in the initial position due to the slack of the artificial muscle.
Additional information
Funding
Notes on contributors
Yoichi Masuda
Yoichi Masuda received the B. Eng., degree from Dept. of System Engineering, Wakayama University in 2013; M. Eng., degree from the Dept. of System Engineering, Graduate School of System Engineering, Wakayama University in 2016; and Ph.D. degree from Dept. of Mechanical Engineering, Graduate School of Engineering, Osaka University in 2019. He is currently an assistant professor in the Dept. of Mechanical Engineering, Osaka University from 2019. His research interests include anatomy-inspired robotics, neurophysiology-inspired robotics, and control theories.
Ryo Wakamoto
Ryo Wakamoto received the B. Eng., degree Dept. of Mechanical Engineering, Graduate School of Engineering, Osaka University in 2021. His research interests include bio-inspired robotics.
Masato Ishikawa
Masato Ishikawa received the Ph.D. degree from Dept. of Mechanical and Environmental Informatics, Tokyo Institute of Technology in 2019. He was a research associate from 1999 to 2002 at Tokyo Institute of Technology; a research associate of Dept. of Information Physics and Computing from 2002 to 2004 at The University of Tokyo; a senior lecturer of Dept. of Systems Science from 2004 to 2010 at Kyoto University; an associate professor of Dept. of Mechanical Engineering from 2010 to 2014 at Osaka University. Since 2014, he is a professor of Dept. of Mechanical Engineering at Osaka University. His research interests include control theories, and robotics.