

ABSTRACT
Upper-limb rehabilitation is a technique for improving muscle development and nervous function in stroke patients through repetitive rhythmic hand movements. However, conventional robot-assisted therapy cannot generate the natural resistant responses seen in therapy administered by therapists, leading to critical limitations in its effectiveness compared to conventional therapy. To overcome this limitation, we propose a novel strategy enabling a rehabilitation robot to generate self-adaptive resistance using electromyography (EMG) autonomously signals from the patient. A position-based force control system based on Fuzzy-PI (proportional and integral) control was successfully implemented in robot-assisted upper-limb rehabilitation. Performance evaluation comprised two primary aspects: examining rehabilitation durations and assessing movement smoothness through jerk values. Experimental outcomes revealed that the self-adaptive control (SAC) strategy, which automatically adjusts resistance, outperforms the non-adaptive control (NAC) approach. SAC demonstrated notable superiority in movement smoothness and extended the duration of upper-limb rehabilitation tasks nearly twofold compared to NAC. Furthermore, applying the jerk concept, and assessing motion smoothness, indicated that SAC exhibited more controlled and seamless movements than NAC. The alignment between participant surveys and the outcomes of parallel tests confirms the validity of the study's conclusions. Thus, this research makes a significant contribution towards improving the effectiveness of robot-assisted therapy in stroke rehabilitation.
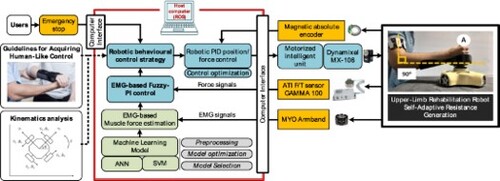
GRAPHICAL ABSTRACT
Acknowledgements
This research was supported by the Natural Science, Research and Innovation Fund (NSRF) and Prince of Songkla University (Grant No ENG6601188S)
Disclosure statement
No potential conflict of interest was reported by the author(s).
Additional information
Funding
Notes on contributors
Prawee Pongsing
Prawee Pongsing received his B.Eng. degree in mechatronic engineering from Prince of Songkla University, Thailand, in 2020. Currently, he is an M.S. degree student in mechanical engineering from Prince of Songkla University, Thailand. His research interests include industrial robotics, mobile robot manipulators, human-robot interaction, and artificial intelligence.
Paramin Neranon
Paramin Neranon received his B.Eng. degree in mechatronic engineering and M. Eng. degree in electrical engineering from Prince of Songkla University, Thailand, in 2004 and 2007. He received his PhD degree in mechanical and systems engineering from Newcastle University, United Kingdom in 2015. He is currently an Assistant Professor of Mechanical Engineering at the Prince of Songkla University. He has been a lecturer in the Mechanical Engineering Department, at Prince of Songkla University, since 2008. His research interests include human-robot interaction, robotic position-based force control, mechatronic systems, and robotics.
Pornchai Phukpattaranont
Pornchai Phukpattaranont received the B.Eng. (Hons.) and M. Eng. degrees in Electrical Engineering from the Prince of Songkla University, Songkhla, Thailand, in 1993 and 1997, respectively, and the PhD degree in Electrical and Computer Engineering from the University of Minnesota, Minneapolis, MN, USA, in 2004. He is currently an Associate Professor of Electrical Engineering at the Prince of Songkla University. He has published more than 42 papers in scientific journals, 70 papers in peer-reviewed conference proceedings, and 4 chapters in books. His work has received more than 2,300 citations. His research interests include signal and image analysis for medical applications and ultrasound signal processing. He is a member of the IEEE, the ECTI Association and the Thai Biomedical Engineering Societies.
Arisara Romyen
Arisara Romyen received her B. Sc. (Agricultural Economics) degrees from the Natural Resources Faculty and M. Sc. (Environmental Management) Environmental Management Faculty, Prince of Songkla University, Thailand in 2003 and 2007. Moreover, she gained a Master of International Economics and Finance, from Newcastle University, United Kingdom in 2014. She received her PhD degree in Economics, (International Program), at Chiang Mai University, Thailand in 2019. She is currently an Assistant Professor of Economics at the Prince of Songkla University. She has been a lecturer in the Department of Agricultural Economics and Agri-Business at Prince of Songkla University, Thailand since 2017. Her research interests are Economics, Econometrics, Agricultural Economics, and International Economics.