

Abstract
This study introduces a novel framework for optimizing energy efficiency and computational load in safety-critical robotic systems operating in nonlinear domains. Leveraging Graph Attention Networks for state awareness and decision-making, the framework employs adaptive sensor and filter toggling strategies to dynamically manage system resources through real-time inferential processes. Our framework maintains continuous robot operation in the presence of sensor noise and environmental disturbances by activating additional sensors, thus preventing system shutdowns or stalls. Few-shot meta-learning techniques further augment the model's adaptability, allowing it to generalize and make real-time decisions across varying operational conditions. An extensive evaluation reveals a reduced average energy consumption, compared to ‘always-on’ configurations, by 13.71% and CPU utilization by 29.07%, without compromising system performance and safety. We also introduce Matching Networks and Siamese Networks with different loss functions to assess the system's capability to adapt to different levels of criticality. Our experiments demonstrate that the system prioritizes performance and safety in high-critical scenarios while maximizing energy efficiency in less critical situations. The framework's real-time decision-making capability is particularly crucial in human–robot environments and holds significant implications for future applications in nonlinear control systems and resilient robotic systems.
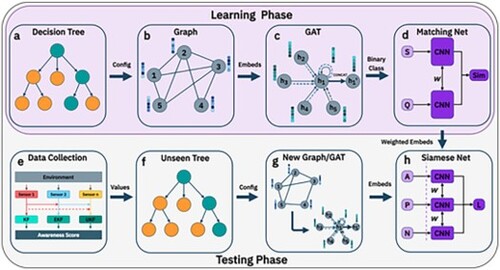
GRAPHICAL ABSTRACT
Disclosure statement
No potential conflict of interest was reported by the author(s).
Notes
Additional information
Funding
Notes on contributors
Christopher Aaron O'Hara
Christopher O'Hara is currently a D.Eng. candidate focused on Artificial Intelligence in the Graduate School of Engineering at the University of Tokyo. Previously, he completed an M.Sc. in Embedded Systems (2019) and an Eng.D in Software Technology (2021) at the Eindhoven University of Technology. He also completed an M.Sc. in Mechatronics from the New Jersey Institute of Technology (2020) and an M.Sc. in ICT Innovation from Technische Universität Berlin (2020). Professionally, he has worked for NASA, Siemens, CERN, and ESA as a system engineer/architect. His research interests include autonomous decision-making, human–robot interaction, reinforcement learning, and system architecture for complex/safety-critical systems.
Takehisa Yairi
Takehisa Yairi is currently a professor at the Research Center for Advanced Science and Technology (RCAST) and the School of Engineering of the University of Tokyo. He received his B.Eng., M.Eng., and Ph.D. degrees in aerospace engineering from the University of Tokyo, Japan in 1994, 1996, and 1999 respectively. His research interests include anomaly detection, health monitoring, fault diagnosis, learning dynamical systems, nonlinear dimensionality reduction, as well as applications of machine learning and probabilistic inference to aerospace systems.