

ABSTRACT
This paper proposes a control method to realize trajectory tracking for snake robots on multiple inclined planes. By explicitly controlling the relative relationship between the robot and the environmental plane, the robot gets into contact with the environmental plane and operates while switching the grounded plane during propulsion. The robot is controlled based on a kinematic model to follow the position and orientation of the head to target trajectory along each plane. The kinematic model is derived by combining the velocity constraint indicating that the wheels do not slip laterally and the kinematic relationship between the robot and the environmental plane. By switching the constraint conditions and the controlled variables, both the head trajectory tracking and maintaining the appropriate relative relationship between the robot and the environmental plane is realized. The effectiveness of the proposed control method was verified through experiments using a physical simulator, and the proposed methods realized the head trajectory tracking on the multiple planes. However, in experiments with actual robot, errors in joint angles and position and rotation of the head accumulated in the direction of the robot body, making it impossible to maintain the appropriate relative relationship, and propulsion was not achieved.
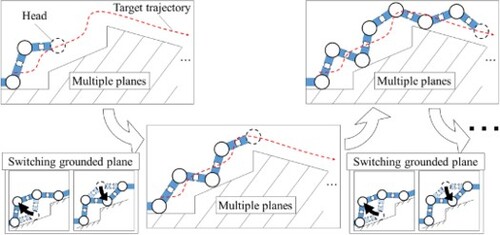
GRAPHICAL ABSTRACT
Disclosure statement
No potential conflict of interest was reported by the author(s).
Additional information
Funding
Notes on contributors
Mizuki Nakajima
Mizuki Nakajima received B.Eng., M.Eng., and Ph.D. degrees in engineering from the Department of Mechanical and Intelligent Systems Engineering, the University of Electro-Communications in 2014, 2016, and 2020, respectively. He is currently an Assistant Professor at the Department of Robotics and Mechatronics, School of Science and Technology for Future Life, Tokyo Denki University. His research interests include the development and control of snake robots.
Motoyasu Tanaka
Motoyasu Tanaka received the B.Eng., M.Eng., and Ph.D. degrees in engineering from the Department of Mechanical Engineering and Intelligent Systems, The University of Electro-Communications, Tokyo, Japan, in 2005, 2007, and 2009, respectively. From 2009 to 2012, he was with the Canon Inc., Tokyo. He is currently a Professor with the Department of Mechanical and Intelligent Systems Engineering, The University of Electro-Communications. His research interests include biologically inspired robotics and dynamic-based nonlinear control. He was a recipient of the IEEE Robotics and Automation Society Japan Chapter Young Award from the IEEE Robotics and Automation Society Japan Chapter, in 2006, and the Best Poster Award at SWARM2015: The First International Symposium on Swarm Behavior and Bio-Inspired Robotics, Kyoto, Japan, in 2015.