

ABSTRACT
Origami patterns play a critical role in the field of soft and reconfigurable robotics. The revolved body formed by waterbomb units is also widely used in robot design. The kinematic model plays a key role in understanding motion characteristics and is vital for dynamic modeling and control of robots based on origami. However, while the deformation of origami patterns is well-studied on the finite element level, the assembly of rigid origami patterns is rarely explored on the kinematic level. Therefore, we propose a chain-like assembly method for constructing revolved bodies using rigid waterbomb units, ensuring crease status unalternation, collision avoidance, axis existence, and seamless assembly. We explore the formability of waterbomb units and investigate the resulting revolved body with some layer and column numbers of waterbomb units. Results demonstrate that increasing the number of columns does not necessarily provide more space for building layers. Additionally, they reveal boundaries of the layer and column numbers for constructing the revolved body and highlight the impact of the aspect ratio and configuration of the waterbomb units on the formability of the revolved body. This method can provide insights for origami-based robot research and can be extended to model other origami patterns.
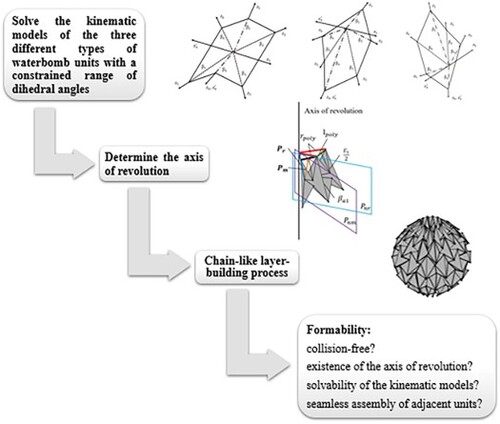
GRAPHICAL ABSTRACT
Disclosure statement
No potential conflict of interest was reported by the author(s).
Additional information
Notes on contributors
Guanyu Chen
Guanyu Chen earned his B.E. from Southwest Jiaotong University in 2020 and his MS in Mechanical Engineering and Applied Science from The University of Pennsylvania in 2022. Currently, he is a Ph.D. candidate at the Samueli School of Engineering, University of California, Los Angeles. His research interests encompass origami robots and exoskeletons.
Songhao Liu
Songhao Liu completed his B.E. at the Beijing University of Chemical Technology in 2019 and his MS in Mechanical Engineering and Applied Science at the University of Pennsylvania in 2023. His research focuses on origami robots and robotics for rehabilitation.
Xuelin Wu
Xuelin Wu earned her B.E. from the University of Mississippi in 2022. She then pursued her MS in Mechanical Engineering and Applied Science at the University of Pennsylvania, graduating in 2024. Her research interests lie in the realms of soft robots and origami robots.