

ABSTRACT
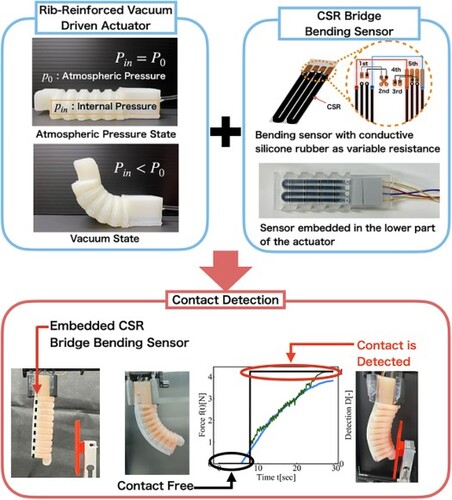
Stable control and accurate sensing are necessary for the safe operation of soft robots, and flexible sensors that can follow the flexible movements of soft robots are needed. In this paper, flexible bending sensors are embedded in a rib-reinforced vacuum-driven actuator with no risk of rupture, considering the application of flexible sensors to human cooperative work and wearable devices. The bending sensor is a bridge circuit with conductive silicone rubber (CSR) for variable resistance. The CSR bridge sensor consists of four CSRs that capture deformation and a circuit with a conductive coating spray printed on a laminated sheet. The sensor value is the output voltage divided by the input voltage, and the effects of the drift and input voltage variations are canceled out. The bending sensor embedded in the silicone actuator has a linear relationship, and the rib-reinforced vacuum driven actuator provides angle PID control for continuously changing reference inputs by feeding back sensor estimated angle. Furthermore, contact detection was established by using the pressure estimated from the CSR bridge sensor and the pressure sensor error as the threshold. The algorithm provides reliable contact detection and force estimation with actuator response thresholds and anti-chattering.
GRAPHICAL ABSTRACT
Acknowledgments
The authors thank Mr. Kouki Uda for his assistance in sensor development while at the Kyoto Institute of Technology.
Disclosure statement
No potential conflict of interest was reported by the author(s).
Additional information
Funding
Notes on contributors
Ryotaro Taguchi
Ryotaro Taguchi received his B.E and M.E degrees from Kyoto Institute of Technology, Japan, in 2019 and 2021. He is currently a Ph.D. candidate in Engineering Design of Kyoto Institute of Technology. His research interests include design and control of vacuum soft actuators, development of flexible sensor, and construction of Soft Robot Systems.
Yuichi Sawada
Yuichi Sawada received his Ph.D. from Kyoto Institute of Technology, Japan, in 1994. In 1995, he joined the Kyoto Institute of Technology as a Research Professor in the Division of Mechanical and System Engineering. He has been a Professor at the Faculty of Mechanical Engineering, Kyoto Institute of Technology, Japan since 2015. He was a Visiting Research Scholar with the Department of Systems Science and Mathematics, Washington University, St. Louis, MO, USA, from 1999–2000. His research interests include modeling and control of flexible structures, control of mechanical systems and rehabilitation robots, and optimal filters. He is a member of IEEE, IMechE, ISCIE, RSJ, and JSME.