

ABSTRACT
The proprioceptive sensory reflex (e.g. stretch reflex) plays an important role in perturbed arm stabilization. Neuroscience studies have widely identified the heteronymous spinal pathways in the human arm, which may contribute to stabilized movement. However, their interactions in living systems pose challenges for specific functional investigations through human experiments. Therefore, this paper concentrates on understanding the effects of two heteronymous pathways, specifically the transmission of monoarticular sensory feedback to innervate biarticular muscles, using the robot. We replicate specific reflex pathways on a 2-DoF musculoskeletal robot equipped with pneumatic artificial muscles. By adjusting the weights of pathways, which resemble human motor control, we evaluate our robot arm performance under the forearm and upper arm disturbances. The outcomes validate their effects on regulating biarticular muscle stimulation, resulting in more stable and coordinated end-effectory trajectories. These reflexive pathways provide insights into the mechanisms underlying human arm perturbations and stabilization. Additionally, the proposed bioinspired system with applicable reflex weights holds great potential in the adaptive response of musculoskeletal robots, guiding robotics researchers in controller design.
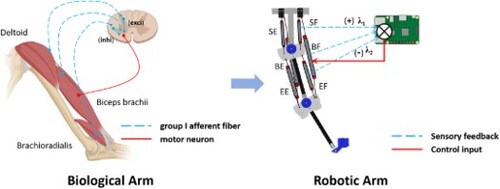
GRAPHICAL ABSTRACT
Acknowledgments
Y.J contributed to the ideas and conception, robot design and experiment, data analysis and interpretation, and manuscript writing. Y.L contributed to robot construction, experiment, interpretation and manuscript improvement. K.H supervised the project. All authors contributed to the manuscript revision, and read, and approved the submitted version.
Disclosure statement
No potential conflict of interest was reported by the author(s).
Additional information
Funding
Notes on contributors
Yelin Jiang
Yelin Jiang received his bachelor's degree in Mechanical Engineering from Tongji University, Shanghai, China in 2021. After joining Adaptive Robotics Laboratory as a research student, he is currently pursing his master's degree at Graduate School of Engineering Science at Osaka University. His research focus on using bioinspired reflexive control to develop robots and understand human behaviors.
Yiqi Li
Yiqi Li received the B. Eng. degree from the School of Mechanical Engineering, Tianjin University, Tianjin, China in 2017. He received the M.Sc. degree in graduate School of Adaptive Machine Systems, Osaka University, Osaka, Japan in 2020. Currently, he is a Ph.D. candidate in Graduate School of Engineering Science, Osaka University. He is focusing on musculoskeletal-robot design, dynamic locomotion and pneumatic system control.
Koh Hosoda
Koh Hosoda received his Ph.D. in Mechanical Engineering from Kyoto University, Japan, in 1993. He was an Assistant Professor in the Mechanical Engineering Department at Osaka University from 1993 to 1997. He an Associate Professor in the Graduate School of Engineering, Osaka University from 1997 to 2010. In this period, he was a Guest Professor in the Artificial Intelligence Laboratory at the University of Zurich from April 1998 to March 1999. He was a Professor in Graduate School of Information Science and Technology from 2010 to 2014 and in Graduate School of Engineering Science from 2014 to 2023, both in Osaka University. He became an Emeritus Professor of Osaka University from 2023. Currently, he is a Professor in the Graduate School of Engineering, Kyoto University.