
ABSTRACT
Global teacher shortage is a serious concern with grave implications for the future of education. This calls for novel ways of addressing teacher roles. The economic benefits of tireless labor inspires the need for teachers who are unlimited by natural human demands, highlighting consideration for the affordances of robotics and Artificial Intelligence in Education (AIED) as currently obtainable in other areas of human life. This however demands designing robotic personalities that can take on independent teacher roles despite strong opinions that robots will not be able to fully replace humans in the classroom of the future. In this article, we argue for a future classroom with independent robot teachers, highlighting the minimum capabilities required of such personalities in terms of personality, instructional delivery, social interaction, and affect. We describe our project on the design of a robot teacher based on these. Possible directions for future system development and studies are highlighted.
Introduction
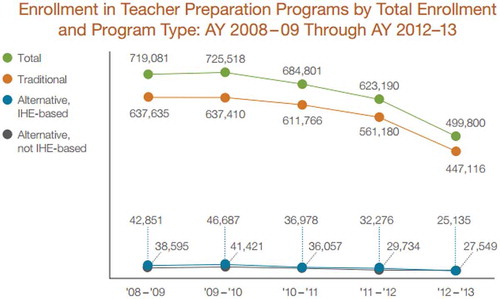
Teacher shortage has become a global issue in education (Flynt and Morton Citation2009; Hutchison Citation2012; Ingersoll and May Citation2011; Martino and Rezai-Rashti Citation2010). The United Nations Educational, Scientific and Cultural Organization (UNESCO), reporting on a major project aimed at addressing the issue, acknowledged that “the issue remains a serious concern” (UNESCO Citation2015). In August 2016, the US department of education published a list of teacher shortage areas (TSAs) across America (Cross Citation2016) which featured a comprehensive compendium of TSA listing from 1990/1991 to 2016/2017. Teacher shortage has been a subject of discussion for some time and has featured as a key subject addressed in the “teacher shortage series” of the US Education Commission (Aragon Citation2016). The situation is more critical as the report not only noted the lack of interest of secondary school leavers in pursuing teacher education programs, but also dwindling enrolment in teacher preparation programs which went down by over 30% from 719,081 in 2008/2009 to 465,536 in 2012/2013 ().
Figure 1. Teacher enrolment in the United States: 2008–2009 to 2012–2013
(Source: Higher Education Act).
The shortage issue is ironically further complicated by growing student enrolment (Kristi Mussman Citation2016) indicated by a 0.4% enrolment growth in public elementary and secondary schools from 1999 to 2011, with a projection of 5.2% growth from 2011 through 2023 reported by the National Center for Education Statistics (Provasnik et al. Citation2007). Teachers’ general job dissatisfaction, lack of recognition, poor remuneration/advancement opportunities, and loss of autonomy are among the factors that have resulted in the current high teacher turnover (Aragon Citation2016) indicated by 46% of teacher “moves and leaves” within a 5-year period, of which 17% were teachers who completely stopped teaching (HEA Citation2016). US schools have also recorded consistent problems in rural school staffing (Malkus, Hoyer, and Sparks Citation2015).
The situation should be expected to be more severe in developing economies, and several studies have addressed attempts at addressing the problem or their grave implications for the future of education (Aragon Citation2016; Cobbold Citation2015; Demirjian Citation2015; Fyfe Citation2007; Mcewan Citation1999; UNESCO Citation2015). The implication of this is that, if the problem is not addressed early enough, the already critical situation will get worse, becoming an extreme educational issue and one that may eventually make primary education inaccessible over time, thereby defeating a major global aim of universal primary education for all. As such, novel ways of delivering formal instruction are needed, hence the growing focus on the use of Artificial Intelligence in Education (AIED). However, addressing teacher shortage through AIED will necessitate capabilities in AI comparable to those of human teachers. In our work, therefore, we extended beyond the perspective of Payr (Citation2005) and considered “educational agents in pedagogical roles” and focused on the physical rather than the virtual classroom.
State of the art
Artificial intelligence in human lives
A lot of progress has been made in the realization of intelligent robots than can perform several functions that were previously thought impossible in daily human lives. Hence, in the last few years, robots have featured as co-workers with humans in factories in Japan, China and other places; they have been reported in classrooms as companions to pupils (Robinson et al. Citation2013) and in healthcare as support for the disabled, critically ill and elderly (Roy et al. Citation2000) and as diagnosis algorithms (Gulshan et al. Citation2016). Super-intelligent game robots have also featured in sports (Müller Citation2016), self-driving cars in logistics (Silberg and Wallace Citation2012), diagnosis algorithms in health care (Gulshan et al. Citation2016), and robot sexual partners in the social realm (Brady Citation2006). Machines have indeed invaded human life.
Artificial intelligence in education (AIED)
Diprose and Buist (Citation2016) noted that current growth in AI in many fields is driven by “the economic benefits of tireless labour” which has fueled automation since the industrial revolution. Employers are bound to be more favourable to non-human teachers who will have no need for job dissatisfaction, recognition, remuneration or for autonomy, leaves, rests and above all, who are not limited by natural affective demands like changes of mood, anger, tiredness, etc. All these are easily addressed through AIED. Some of the key areas of robot functionalities in the education realm are highlighted below.
Robots as pedagogical agents, teaching aids, and assistants
Though several studies have reported on the development of online- and screen-based pedagogical agents (PAs), research studies imply strong support for embodied PAs as necessary for promoting effective instruction (Heller and Procter Citation2012; André Pereira et al. Citation2008). Designing classroom-based robotic personalities, and especially those that can take on teacher roles, is however challenging (Sharkey Citation2016). Several educational studies have reported the positive roles of robots in learning to include its ability to address absenteeism (Iver, Abele, and Douglas Citation2014), act as triggers for productive dialogue in language instruction (Tegos, Demetriadis, and Tsiatsos Citation2014), provide emotional support for learners (Dennis, Masthoff, and Mellish Citation2016), and promote creativity and problem-solving (Liu et al. Citation2013) among others. The implications for students’ future well-being have also been discussed (Saltinski and Ph Citation2015).
The future of robots in human life and society
“Intelligent machines and robots are the workforce of the future,” says Elon Musk, Silicon Valley futurist and Tesla CEO; according to him, the situation is such that humans are not left with any option. With automated systems showing up in every sector, Elon further predicts a universal wage, to be paid by government since humans will be left with almost nothing to do. Though not everyone will agree with this position, current progress in AI and robotics supports such a future which was further confirmed in a recent study that evaluated when robots can be expected to take over current human jobs completely (Grace et al. Citation2017) based on a survey of topmost experts in AI and machine learning. The findings, shown in as milestones of achievement in AI, presents an interesting discussion; the experts predicted 45 years from 2016 (i.e., 2062), as the average time that it will take before robots can do virtually all human jobs. Though this is a mean value as experts are divided across mostly a period of <10 to 50 years, it throws some light on how close we are to this reality. The recent defeat of top human expert on the Go game by Google’s AI, predicted to be a possibility in 12 years, but accomplished within 2 years, also provides some indications of the significance of these values, and suggesting that the realization of these projections may be much closer than predicted.
Figure 2. Milestones of achievements in AI.
Independent robot teachers
Opinions vary on the future of robots in the classroom with some instructional designers and other educational stakeholders of the opinion that robots are neither about to or ever going to be capable of taking over the role of teachers (Chin, Wu, and Hong Citation2011; Lee et al. Citation2008; You et al. Citation2006). Brian David Johnson of Intel and author of “21st Century Robot” strongly believes robots will “never, ever” replace teachers. Most of the studies reported on robots in education have also described dialogue-based conversational agents, and intelligent tutoring systems (ITSs) or general robots. Studies that describe full-fledged robotic instructors are scarce, indicating possible direction of future development and research in AIED.
Considering the role that telepresence robots are already playing in teaching, for example, Robosem teaches English in Korea, providing a solution to certified English teachers’ scarcity (Powell Citation2014), it might be too early to draw conclusions on what the future holds in terms of AIED. Robot teachers hold many advantages over human teachers as noted, and the economic implications of these factors, coupled with developments in AI, robotics, and machine learning, suggests that in the future, the teacher’s job could be performed more effectively by robots. The ability of machines to process huge amounts of information and utilize the output for addressing student needs underscores another significant area where AI surpasses humans. The same applies to the ability to interact with human learners without human emotions getting in the way. Maintaining a team of satisfied teachers is challenging, but if they are robots, it can be done much less expensively through AI, indicating that robots could be good substitutes for human teachers.
Despite their currently limited capabilities, physically embodied robots play diverse roles as classroom assistants, educational technologies, and teaching support systems in current classrooms. This will be further extended by development in robotics, AI, and machine learning. Their ability to surpass human teachers in terms of domain knowledge and maintenance costs makes them more desirable than human teachers. By appraising the factors that will become important in the future classroom with robot teachers and possibilities with the rate of growth and trends in AI and machine learning, we conclude that work in AIED should focus on evaluation of key factors required for such personalities, development of such systems, as well as other important factors like possible changes in the learning environments that such system might engender in education.
Challenges with independent robot teachers
Manyika et al. (Citation2017) agreed with UNESCO’s concern regarding global teacher scarcity and the potential of AI as a possible practical solution to achieving universal primary education by 2030 as well as providing the much-needed hope in third-world countries and remote locations through coaching and assessing. However, they believe that the latter require skills that are beyond machines’ capabilities, though they acknowledge that new capabilities, including development in deep learning algorithms, can support pattern recognition and other important capabilities regarding learning.
Manyika et al. (Citation2017), however, imply that due to the need for skills like emotional intelligence, creativity, and communication, for which human teachers are naturally endowed, good (human) teachers will continue to be a need in the future classroom. They agree that many routine skills in education, like scheduling and lesson planning are ‘obvious candidates for AI assistance,’ but, also take the same position with Blututors (Citation2016), that machines are unable to inspire humans or “develop the social skills and emotional intelligence” required particularly by teachers.
Daphne Koller of Coursera holds a similar notion that “people are social animals… they like to learn in groups and they like to learn from people,” and he declared and concluded that despite tremendous technology-aided achievement in education like that of Coursera, there is no surety that “AI can do everything that a human college professor can do” (Jhonson and Lester Citation2016). He cited content creation, providing inspiration for learning, and attending to what he described as the “really challenging questions” as things only human teachers will be able to do in line with the demands of human–human social interaction that are essential for learning.
Considering that most of the AIED studies reported have focused on the western world and other regions in the developed world, whereas, AI solutions could serve developing economies better, there is a need to focus on development of such systems with the most needful regions in mind in terms of culture, curriculum, student/teacher characteristics, and student–teacher relationships. This also suggests the need for evaluation of public and stakeholder perceptions in such regions as a means of assessing needs and future acceptance. Consideration for social and demographic factors like culture and religion and other prejudices that play very strong roles in the social lives and perceptions of the people should be given due consideration.
Indicators of effective design in the traditional classroom, evaluated in terms of human–robot interaction (HRI), are important in addition to classroom interaction in terms of educational proxemics, that is, the study of spatial factors in social relationships. Within classroom-based HRI, the concept of proxemics will have implications for classroom management, learner engagement, and safety among other factors. In addition, acceptance of a robot teacher personality will be much influenced by its ability to integrate socially with human students. This points to the importance of the concepts of agency and social presence.
Our project: development of an independent robot teacher
The entire system is divided into sections as instructional delivery, pedagogy and learning content, and motion system and sensory (affective) systems. The project employed basic programming languages including java, python, and C+. The conversational part is based on AIML scripts. Parts of the systems that were written in different languages were connected through sockets such that program functions can be called from another language. The development captured factors that relate to the three domains of learning including the cognitive, psychomotor, and affective domains. Hence, the three sections instructional delivery, pedagogy and learning content (cognitive domain), and motion system (psychomotor domain) and sensory system (affective domain).
The design and development of robotic teachers must also take into consideration important elements of social interaction as well as classroom proxemics to promote effective learning. The central question that we aim to answer is: can we build a robot which can act as a teacher? Therefore, in our project, we focused on the design of a robot teacher with capabilities for instructional delivery, social interaction. and basic affective requirements of handling a teacher’s duty. In line with the foregoing, we conceive that an independent robot teacher will require some capabilities, which are captured in the objectives of our project, and these include the ability to:
exhibit characteristics expected of a social agent (agency and social presence)
deliver instruction by selecting and employing appropriate pedagogy
manage and engage in social interaction in the classroom.
In the first stage of our work, we considered three basic factors including current focus on Science, Technology, Engineering and Mathematics (STEM) areas, emphasis on collaborative rather than individual approaches to learning, and student-focused, rather than instructor-focused pedagogies. Subsequent steps will build on this initial prototype, with the aim of achieving the creation of an independent robotic teacher. We will be interested in evaluating how well robots will be able to provide solutions to the teacher shortage problem highlighted in this article and to answer questions regarding robot–teacher quality measured in terms of established quality indicators to assess how well a robot can perform as an independent teacher. Its ability to promote learner engagement, motivation/interest, and higher performance as well as an assessment of the factors that promote these to aid future design of more effective systems. In the following section, we provide a brief description of our basic conception of an independent robot teacher which provides the foundation for the development.
Teacher personality
Studies have confirmed the effectiveness of physically embodied agents above those of screen-based or animated agents (André Dahl and Boulos Citation2013; Pereira et al. Citation2008); hence, we considered a physical robot as the appropriate choice for our design. Though studies have demonstrated that the agentic appearance and affective capabilities have implications for students’ learning (Jensen, Jordine, and Wilson Citation2011; Johnson and Lester Citation2016), agentic size (in terms of physical robot) has not been the focus of studies. Robot size (miniature versus life size) does not represent a major factor in our design due to cost; however, we have in mind to assess student expectations regarding this in future studies.
The hardware system
We employed a small, legless 24-cm high, 800-g robot manufactured by VStone Company (Osaka, Japan). The robot, Sota, coined from the basis of its development as a “So(cial) ta(lker),” is a social dialog robot with many degrees of freedom in its eyes, head, and body, which enable various representations that support a sense of conversation (Osaka University Citation2015). Though its development was focused on use in elderly care facilities, it possesses the basic capabilities that are significant for our design. Sota can connect to electronic and other types of sensor-enabled devices to create the so-called IoT (Internet-of-Things) network. It is portable and small enough to be moved even by small children and can be positioned on a table or desk. It can engage in conversation and can be programmed to make assessment based on data and to display such on a connected screen. This is leveraged for the classroom response system (CRS) and the instructional systems. Sota also has capability for voice recognition and speech synthesis, and it can convert conversation into data on a cloud computing system, which in turn will send commands wirelessly to devices. The data can be employed in various ways for addressing coordination.
Pedagogy and instructional system
Most available robotic systems in education are based on the 1-robot-1-human design; however, current education paradigm focuses on collaborative approaches to teaching and learning, with a shift in ITSs from one-on-one to more collaborative settings. Aimeur, Frasson, and Dufort (Citation2000) described the learning companion model involving a 1-student-1-companion-1-instructor system, highlighting its advantage over the classical tutoring model. Other elements of new education paradigm including metacognition, conceptual learning, and social/peer and active learning approaches are also considered in our work. Several instructional approaches currently leverage one of these factors; however, peer instruction (Brill and Hodges Citation2010; Mazur Citation1997; Mazur and Watkins Citation2010) integrates the various elements by factoring peer/social learning (Michinov, Morice, and Ferrières Citation2015), student response (Donovan Citation2008), dialogue/group discussion (Smith et al. Citation2009), or learning by teaching and metacognition/conceptual learning (Mcconnell et al. Citation2006) in a single approach. The effectiveness of the learning-by-teaching approach has been highlighted in studies (Biswas et al. Citation2005) and shown to yield even better results when combined with conceptual learning to promote metacognition.
The significance of STEM education and K-12 learning is also factored into the design with focus on basic chemistry (matter, elements, and atoms). The teacher’s role as a facilitator of learning is also highlighted in the design; the traditional role of the teacher as the “sage-on-stage” is replaced by his role as a moderator of the learning-by-teaching, or “peer instruction” approach. The teacher introduces the topic with the simplest call on learners’ attention, followed by quiz items designed as conceptual questions to foster metacognition. The key aspect of learning take place during the student discussion session which is moderated by the teacher who at the end of the session provides a summary, highlighting the basic principles in focus and expanding on students’ explanations offered during the discussion session.
Classroom-based social interaction
Learning and communication has been shown to mutually influence each other (Abdullah and Cerri Citation2005). They noted that people operate based on some unwritten internal rules which can influence learning, adaptation, and merging of protocol within the communication context. This is similar to the concept of social interaction captured in proxemics, which addresses culture-inspired internal rules that moderate social interaction including classroom-based communication. A breakdown of these rules will result in failed communication in any context, and it is therefore a key consideration in the development of the interaction or communication system.
A good teacher is expected to be a good communicator, and able to exhibit agency and social presence (Priestley Citation2015; Straub Citation2016; Andre Pereira, Prada, and Paiva Citation2014) which is indicated by several elements of social presence or agency (Biocca, Harms, and Gregg 2001; Andre Pereira, Prada, and Paiva Citation2014; Straub Citation2016) including the following:
physical embodiment or presence including ability to engage other agents in face-to-face interaction, attention allocation to other agents and perception of a reciprocal allocation from them
perceived reciprocal message understanding
believable verbal & non-verbal behaviours use of symbolic expressions, ability to recognize other agent(s) and perceive itself as recognized
observation of the rules of social communication (turn-taking, greetings, form of address, etc., leave-taking (Nebeska Citation2005), social cues (proxemics, gaze, etc.)
simulation of context-related social roles
synchronized and coordinated context-specific or context-related action/behaviour and
social memory (Pereira et al., Citation2014; Straub, Citation2016, Biocca et al., 2001).
Hence, we conceived that a “real” teacher should be able to perceive others and acknowledge perception by others; use a form of address with individual students or the whole class; be able to observe basic rules of social communication including greetings, turn-taking and leave-taking; recognize other agents, in this case, the students; and simulate context-related social role, that is, play roles expected of a teacher. In line with this, we conceived that the teacher should be able to attain a significant measure of teacher quality indicator by performing the duties of a learning facilitator through display of content knowledge, understanding, preparedness, and classroom management (Rice Citation2003). His ability to provide motivation and feedback and operate in a collaborative setting is important in addition to his display of social interaction skills. Our design therefore focused on a system to capture students’ identities at the beginning of class sessions and storage in a database assessable by the robot. This capture system employs a CRS linked to the assessment system.
Quiz sessions are conducted by the display of question items followed by student choice selected and submitted as a “vote” using the CRS which links responses with each student’s identity provided at the beginning of the session. This is followed by a discussion session that follows the student–teach–student, peer teaching approach. To show capability to recognize and obey basic rules of social interaction, the concept of turn-taking (Bruijnes Citation2012; Holler et al. Citation2015) is enabled by silence sensed through the absence of voices of discussants in the class. This enables the teacher to “know” when to continue with lesson or discussions. The teacher greets the class at the beginning of the class, introduces itself, addresses students by name, and led the class into group discussion.
The teacher prompts the peer discussion session by calling out student’s name randomly and asking them to lead the discussion session by explaining the reason for their choice of answer. Apart from making the students to experience the feeling of having been perceived as present by the robot, this also serves as a means of promoting active learning and dialogue among the students. In addition, the teacher can leverage on the degrees of freedom in its head region, including changes in its eye colour to simulate ‘facial expressions’, thereby communicating approval/ disapproval. This can be extended to also communicate anger, sadness, joy or other emotions. Hence, by coordinating movements in various parts of its body with the facial expressions, we simulated non-verbal communication, including body language, which is a significant concept in human-human interaction. The robot-teacher closes the lesson with a summary, greeted and dismissed the class.
The human teacher in the classroom of the future
Opinions such as those of Powell (Citation2014) and Manyika et al. (Citation2017) are mainly due to the demands of capabilities for social interaction and affective communication that machines are hitherto believed to be incapable of; however, the level of technology-induced changes in the twenty-first century education, coupled with increase in machine intelligence, indicates that in the near future, AI will not only serve as classroom assistants or student peers, but will be capable of carrying on affective relationships with learners and handle classroom management as expected of human teachers. Their ability to perform at much higher levels at cognitive tasks than human teachers further suggests they will be better in terms of subject knowledge. All these indicate future “classrooms” where full-fledged robot teachers are highly desired and in control (Sharkey Citation2016).
Conclusion and future works
With massive investment in technology and the heated race by top tech giants to take the lead in the AI market, Maney (Citation2016) was sure “AI will lead us into the mother of all tech revolutions.” Regarding the evolution of robots, he noted that the first crude version of a robot attending at a fuel station appeared around the mid-1960s in Colorado; a gradual growth was witnessed over a ten-year period that extended to the 1970s. This was followed in the next 3 decades by a rapid growth that almost completely phased out human gas station attendants by the 2000s. Maney believes we can expect a gradual to drastic change over a fifty-year period.
Going by the 50-year timeline, and the current rate of technological development, the new wave of technological growth that began after the 2000s can be expected to come to maturity in the next five decades. That is, we can expect the next drastic change around the next three decades or less. This means we can safely predict that even the most clearly traditional educational roles like curriculum development, instructional design, lesson planning, summative assessments requiring some open-ended approaches, school management, establishment of schools, and similar duties will not remain human preserves for too long. The implication of this is that much less school duties will gradually require human teachers, with the result that the roles of human teachers in some fields of education will become totally unnecessary as time progresses. This calls for a projection into the future regarding the positive and negative implications of these developments and how to prepare for them.
The system described represents the most basic architecture of the complete system in our plan. It describes the key elements of classroom interaction and learning that are important in designing a teacher system. Evaluation of the initial prototype described here will lead to future development which will include the integration of proxemic consideration as a key factor in human–human interaction. Its implications for classroom-based HRI will inspire the upgraded system.
Achievement in dialogue systems and conversational capabilities in robotic agents combined with affective computing holds the promise of a robust system that can overcome the current limitations of machines in performing many of the duties of an independent teacher. When the current progress in AI, coupled with machine learning, and especially deep learning approaches are combined, the realization of a full-fledged or independent robot teacher may be much nearer than it is currently being imagined. The added advantages of cheaper and higher quality service will further promote the achievement of the reality much faster.
However, though we believe that independent robot teachers are possibilities in the near future, and that they will cause a disruption of the educational landscape, including the loss of many jobs related to teacher roles, we envisage that new types of roles/jobs will emerge to replace these ones. Hence, all stakeholders must begin to figure out what such roles might entail and what skills will be required for them.
References
- Abdullah, N. N. B., and S. A. Cerri. 2005. Analysis and synthesis of learning agent’s communicative behavior. Applied Artificial Intelligence 19:1015–41. doi:10.1080/08839510500304116.
- Aimeur, E., C. Frasson, and H. Dufort. 2000. Cooperative learning strategies for intelligent tutoring systems. Applied Artificial Intelligence 14 (5):465–89. doi:10.1080/088395100403388.
- Aragon, Stephanie. 2016. “Teacher Shortages: What We Know.” 1. Teacher Shortage Series. Denver, CO 80203. http://www.ecs.org/ec-content/uploads/Teacher-Shortages-What-We-Know.pdf.
- Biocca, F., C. Harms, and J. Gregg; Media Interface, and Network Design M I N D Labs. 2001. The networked minds measure of social presence: Pilot test of the factor structure and concurrent validity co-presence. East 21 (January 2001):9–11.
- Biswas, G., K. Leelawong, D. Schwartz, and N. Vye, and The Teachable Agents Group at Vanderbilt. 2005, January. Learning by teaching: A new agent paradigm for educational software. Applied Artificial Intelligence 19 (30):363–92. doi:10.1080/08839510590910200.
- Blututors. 2016. Artificial intelligence – Will smart computers replace teachers? BlueTutors. https://bluetutors.co.uk/tuition-articles/2016/dec/bluetutors-articles/artificial-intelligence-will-smart-computers-replace-teachers.
- Brady, J. A. 2006. Human-robot relationships: The future of full-functionality. Department of Computer Science and Engineering University of California. Riverside: Department of Computer Science and Engineering University of California.
- Brill, J. M., and C. B. Hodges. 2010. Investigating peer review as an intentional learning strategy to foster collaborative knowledge-building in students of instructional design. International Journal of Teaching and Learning in Higher Education 23 (1):114–18. International Society for Exploring Teaching and Learning. Web site: http://www.isetl.org/ijtlhe:.
- Bruijnes, M. 2012. Social and emotional turn taking for embodied conversational agents. Proceedings - 2012 ASE/IEEE International Conference on Privacy, Security, Risk and Trust and 2012 ASE/IEEE International Conference on Social Computing, SocialCom/PASSAT 2012, 977–78. doi:10.1109/SocialCom-PASSAT.2012.29.
- Chin, K.-Y., C.-H. Wu, and Z.-W. Hong. 2011. A humanoid robot as a teaching assistant for primary education. 2011 Fifth International Conference on Genetic and Evolutionary Computing, 21–24. doi:10.1109/ICGEC.2011.13.
- Cobbold, C. 2015. Solving the teacher shortage problem in Ghana : Critical perspectives for understanding the issues. Journal of Education and Practice 6 (9):71–80.
- Cross, F. 2016. Teacher shortage areas nationwide listing 1990–1991 through 2016–2017. Department of Education, United States of America. doi:10.1177/1362168812455588.
- Dahl, T., and M. Boulos. 2013. Robots in health and social care: A complementary technology to home care and telehealthcare? Robotics 3 (1):1–21. doi:10.3390/robotics3010001.
- Demirjian, H. 2015, March. Teacher shortage in the Arab World : Policy implications. Research Paper. Doha, Qatar: Arab Center for Research and Policy Studies.
- Dennis, M., J. Masthoff, and C. Mellish. 2016. Adapting progress feedback and emotional support to learner personality. International Journal of Artificial Intelligence in Education 26 (3):877–931. doi:10.1007/s40593-015-0059-7.
- Diprose, W., and N. Buist. 2016. Artificial intelligence in medicine: Humans need not apply? New Zealand Medical Journal 129 (1434):73–76.
- Donovan, W. 2008. An electronic response system and conceptests in general chemistry courses. Journal of Computers in Mathematics and Science Teaching 27 (4):369–89.
- Flynt, S., and R. C. Morton. 2009. The teacher shortage in America: Pressing concerns. National Forum of Teacher Education Journal 19 (3):1–5.
- Fyfe, A. 2007. The use of contract teachers in developing countries: Trends and impact. Geneva: Sectoral Activities Programme.
- Grace, K., J. Salvatier, A. Dafoe, B. Zhang, and O. Evans. 2017. When will AI exceed human performance? Evidence from AI experts. arXiv Preprint arXiv:1705.08807.
- Gulshan, V., L. Peng, M. C. Marc Coram, D. W. Stumpe, A. Narayanaswamy, S. Venugopalan, et al. 2016. Development and validation of a deep learning algorithm for detection of diabetic retinopathy in retinal fundus photographs. JAMA: The Journal of the American Medical Association 304 (6):649–56. doi:10.1001/jama.2016.17216.
- Heller, B, and M Procter. 2012. “Embodied and Embedded Intelligence: Actor Agents on Virtual Stages.” In Intelligent and Adaptive Learning Systems: Technology-Enhanced Support for Learners and Teachers, edited by Sabine Graf, Fuhua Lin, Kinshuk, and Rory McGreal. Hershey, PA: IGI Global. doi: 10.4018/978-1-60960-842-2.
- Higher Education Authority (HEA). 2016. “Key Facts and Figures.” Ballsbridge, Dublin 4 DO4 C2Y6. http://hea.ie/assets/uploads/2017/06/HEA-Key-Facts-and-Figures-201516.pdf.
- Holler, J., K. H. Kendrick, M. Casillas, and S. C. Levinson. 2015. Editorial: Turn-taking in human communicative interaction. Frontiers in Psychology 6. doi:10.3389/fpsyg.2015.01919.
- Hutchison, L. F. 2012. Addressing the STEM teacher shortage in American schools: Ways to recruit and retain effective STEM teachers. Action in Teacher Education 34 (5–6):541–50. doi:10.1080/01626620.2012.729483.
- Ingersoll, R. M., and H. May. 2011. The minority teacher shortage: Fact or fable ? Kappan Magazine 93 (1):62–65. doi:10.1177/003172171109300111.
- Iver, Mac, Martha Abele, and J. Douglas. 2014. “‘ STEMming’ the Swell of Absenteeism in Urban Middle Grade Schools: Impacts of a Summer Robotics Program.” In Society for Research on Educational Effectiveness (SREE), 6-8 September. Washington D.C.
- Jensen, A., K. Jordine, and D.-M. Wilson. 2011. Using embodied pedagogical agents and direct instruction to augment learning for young children with special needs. CHI Conference on Human Factors in Computing Systems, Vancouver, BC, Canada. ACM Press.
- Johnson, W. L., and Lester, J. C. 2016. Face-to-face interaction with pedagogical agents, twenty years later. International Journal Artificial Intelligent Education 26:25–36. doi:10.1007/s40593-015-0065-9.
- Kristi Mussman. 2016. “Prior Lake-Savage Area Schools: U.S. Department of Education Green Ribbon Schools.” Prior Lake-Savage Area: U.S. Department of Education.
- Lee, E., Y. Lee, B. Kye, and B. Ko. 2008. Elementary and middle school teachers ’, students ’ and parents ’ perception of robot-aided education in Korea. Proceedings of EdMedia: World Conference on Educational Media and Technology 2008, 175–83. Vienna.
- Liu, E., Z. Feng, C. H. Lin, P. Y. Liou, H. C. Feng, and H. T. Hou. 2013. An analysis of teacher-student interaction patterns in a robotics course for kindergarten children: A pilot study. Turkish Online Journal of Educational Technology 12 (1):9–18.
- Malkus, Nat, Kathleen Mulvaney Hoyer, and Dinah Sparks. 2015. “Teaching Vacancies and Difficult-to-Staff Teaching Positions in Public Schools (NCES 2015-065),” no. November:1–28.
- Maney, K. 2016. How artificial intelligence and robots will radically transform the economy. Newsweek: Tech & Science, November.
- Manyika, J., M. Chui, M. Miremadi, J. Bughin, K. George, P. Willmott, and M. Dewhurst. 2017. A future that works: Automation, employment, and productivity. New York: McKinsey Global Institute, no. January, 1–28.
- Martino, W., and G. M. Rezai-Rashti. 2010. Male teacher shortage: Black teachers’ perspectives. Gender & Education 22 (3):247–62. doi:10.1080/09540250903474582.
- Mazur, E. 1997. Peer instruction: Getting students to think in class. AIP Conference Proceedings, Cambridge, vol. 399, 981–88. AIP. doi:10.1063/1.53199.
- Mazur, E., and J. Watkins. 2010. Justing-in-time teching and peer instruction. In Just in time teaching: Across the disciplines, and across the academy (New pedagogies and practices for teaching in higher education), eds. S. Simkins, and M. Maier, 39–62. Virginia: Stylus Publishing.
- Mcconnell, D. A., D. N. Steer, K. D. Owens, J. R. Knott, J. Dick, and P. J. Heaney. 2006. Using conceptests to assess and improve student conceptual understanding in introductory geoscience courses. Journal of Geoscience Education 54:61–68. doi:10.5408/1089-9995-54.1.61.
- Mcewan, P. J. 1999. Recruitment of rural teachers in developing countries: An economic analysis. Teaching and Teacher Education 15:849–59. doi:10.1016/S0742-051X(99)00025-6.
- Michinov, N., J. Morice, and F. Vincent. 2015. A step further in peer instruction: Using the stepladder technique to improve learning. Computers & Education 91:1–13. doi:10.1016/j.compedu.2015.09.007.
- Müller, M. 2016. Mastering the game of go - How did a computer program beat a human champion??? Alberta: Faculty of Science, University of Alberta.
- Nebeska, I. 2005. On the norms of communication. Prague: Charles University.
- Osaka University. 2015. Development of social dialogue robots ‘commu’ and ‘sota’. Research at Osaka University. http://resou.osaka-u.ac.jp/en/research/2015/20150120_2.
- Payr, S. 2005. Not quite an editorial: Educational agents and (E-)learning. Applied Artificial Intelligence 19 (3–4):199–213. doi:10.1080/08839510590910147.
- Pereira, A., C. Martinho, I. Leite, and A. Paiva. 2008. iCat, the chess player: The influence of embodiment in the enjoyment of a game. In Proceedings of 7th International Joint Conference on AAMAS, May 12 - 16, edited by Padgham, Parkes, Müller, and Parsons, 1253–56. Estoril, Portugal: International Foundation for Autonomous Agents and Multiagent Systems.
- Pereira, A., R. Prada, and A. Paiva. 2014. Improving social presence in human-agent interaction. Proceedings of the 32nd ACM Conference on Human Factors in Computing Systems, 1449–58. doi:10.1145/2556288.2557180.
- Powell, M. 2014. Robot teachers in the classroom. iQ. https://iq.intel.com/robot-teachers-in-the-classroom/.
- Priestley, M. 2015. Teacher agency: What is it and why does it matter? British Educational Research Association Blog, September. London: Routledge.
- Provasnik, Stephen, Angelina KewalRamani, Mary McLaughlin Coleman, Lauren Gilbertson, Will Herring, and Qingshu Xie. 2007. “Status of Education in Rural America.” Washington DC.
- Rice, J. K. 2003. Executive summary. In Teacher quality: Understanding the effectiveness of teacher attributes, Vol. v-7. Washington, DC: Economic Policy Institute. doi:10.1136/ip.8.suppl_1.3.
- Robinson, H., B. MacDonald, N. Kerse, and E. Broadbent. 2013. The psychosocial effects of a companion robot: A randomized controlled trial. Journal of the American Medical Directors Association 14 (9):661–67. doi:10.1016/j.jamda.2013.02.007.
- Roy, N., G. Baltus, D. Fox, F. Gemperle, J. Goetz, T. Hirsch, D. Margaritis, et al. 2000. Towards personal service robots for the elderly. Workshop on Interactive Robots and Entertainment (WIRE 2000) (2000) 25 (2000):184. doi:10.1007/s12369-014-0232-4.
- Saltinski, R., and D. Ph. 2015. Accelerating technologies: Consequences for the future wellbeing of students. Journal of Instructional Pedagogies 17:1–6.
- Sharkey, A. J. C. 2016. Should we welcome robot teachers? Ethics and Information Technology 18:283–97. doi:10.1007/s10676-016-9387-z.
- Silberg, G., and R. Wallace. 2012. Self-driving cars: The next revolution. Center for Automotive Research 36. Delaware: KPMG Group.
- Smith, M. K., W. B. Wood, W. K. Adams, C. Wieman, J. K. Knight, N. Guild, and T. T. Su. 2009. Why peer discussion improves student performance on in-class concept questions. Science (New York, N.Y.) 323 (5910):122–24. doi:10.1126/science.1165919.
- Straub, I. 2016. ‘It looks like a human!’ The interrelation of social presence, interaction and agency ascription: A case study about the effects of an android robot on social agency ascription. AI and Society 31 (4):Springer London: 553–71. doi:10.1007/s00146-015-0632-5.
- Tegos, S., S. Demetriadis, and T. Tsiatsos. 2014. A configurable conversational agent to trigger students’ productive dialogue: A pilot study in the CALL domain. International Journal of Artificial Intelligence in Education 24 (1):62–91. doi:10.1007/s40593-013-0007-3.
- UNESCO. 2015. “The Challenge of Teacher Shortage and Quality: Have We Succeeded in Getting Enough Quality Teachers into Classrooms?” In 12th Session of the Joint ILO/UNESCO Committee of Experts on the Application of the Recommendations Concerning Teaching Personnel (CEART), Paris (April 2015), 1–9. Paris: GMR and UNESCO.
- You, Z.-J., C.-Y. Shen, C.-W. Chang, B.-J. Liu, and G.-D. Chen. 2006. A robot as a teaching assistant in an English class. Advanced Learning Technologies, 2006. Sixth International Conference on, 87–91. doi:10.1109/ICALT.2006.1652373.