
ABSTRACT
Due to the high cost pressure and the increasing variant diversity, the cooperation of humans and robots represents a promising technological solution to achieve higher flexibility and efficiency in assembly. It is therefore attracting significant interest from both researchers and practitioners. As a result, numerous reviews have been published addressing different aspects of human-robot collaboration, such as safety, interaction modalities, programming, and applications. However, in this paper, for the first time, the aspect of task allocation for collaborative assembly is methodologically examined through a systematic literature review. This paper presents the current state of the art in task allocation approaches, investigates the criteria for deciding on a suitable task assignment, and discusses challenges and future research needs. After filtering the 521 publications that resulted from the initial search process, 37 relevant publications were included in the analysis and grouped into a proposed classification consisting of two main categories, static and dynamic task allocation approaches. Based on the results of the literature review, this paper presents a reference model for human-robot collaborative assembly.
1. Introduction
Industrial assembly must cope with a high degree of complexity, as the configuration of product variants mostly takes place in assembly (ElMaraghy et al. Citation2013). The underlying external market drivers, such as stronger customer orientation and individualization of products, lead to increasing product varieties and decreasing lot sizes. This strongly increases the complexity of industrial assembly as more variants with fewer equal parts are assembled on the same lines (Bänziger, Kunz, and Wegener Citation2018). In addition, the available amount of well-qualified employees on the market is decreasing due to demographic changes (Bänziger, Kunz, and Wegener Citation2018), while changing market demands require scalability of production volumes. Furthermore, the increasing cost pressure in industrial assembly (Lotter and Wiendahl Citation2012) has dramatically restricted the profit margin for companies, mainly because of increasingly expensive human labor costs (Chen et al. Citation2014). Those trends require both the use of automation technology (Müller, Vette, and Mailahn Citation2016) and a flexible assembly (Scholz-Reiter and Freitag Citation2007). While other manufacturing systems in industry are already widely automated, assembly processes remain predominantly operated manually (Spena et al. Citation2016; Fast-Berglund et al. Citation2016), especially for low to medium product volumes (Lotter and Wiendahl Citation2012). In conjunction with the aforementioned flexibility demands, less defined working procedures in low-volume assembly compared to fully automated robotic cells (Antonelli and Bruno Citation2019) result in traditional automation technologies with limited flexibility to be unsuited (Ranz, Hummel, and Sihn Citation2017).
To meet those challenges, Industry 4.0 offers new technologies such as assistance systems and automation solutions to improve productivity, quality, ergonomics, and the flexibility of manual and hybrid assembly processes. These technologies cognitively and physically support assembly workers (Mark, Rauch, and Matt Citation2021). Cognitive support for workers in manual assembly is particularly enabled by informational assistance systems that guide assembly workers through the process, ensuring high quality and enabling less-qualified workers to perform the assembly (Hinrichsen et al. Citation2016). Regarding physical support of assembly processes, collaborative robots belong to the key enabling technologies within Industry 4.0 (Antonelli and Bruno Citation2019). Unlike traditional industrial robots, which operate behind separating safety barriers, collaborative lightweight robots (Colgate, Wannasuphoprasit, and Peshkin Citation1996; Krüger, Lien, and Verl Citation2009) allow workers and robots to work closely together in hybrid workplaces. This expands the applicability range of robotic automation towards lower production volumes (see ) (Kopp, Schäfer, and Kinkel Citation2020; Matthias and Ding Citation2015).
Figure 1. Field of application for human-robot collaboration in assembly (in accordance with and adapted from (Lotter and Wiendahl Citation2012)).
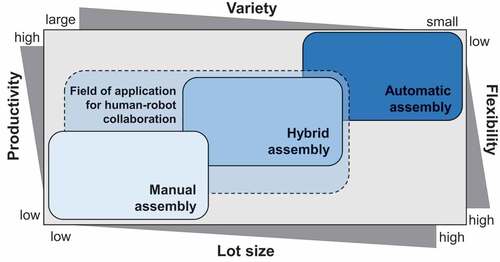
The introduction of collaborative robotic systems into manual assembly stations offers the potential to combine the advantageous skills of human workers, such as dexterity, flexibility, perception, and intelligence, with those of robots, such as precision, repeatability, and strength (Tsarouchi, Makris, and Chryssolouris Citation2016; Fast-Berglund et al. Citation2016). Especially in repetitive tasks, robots are not affected by performance fluctuations and fatigue, unlike humans (Bauer et al. Citation2016). Moreover, the integration of collaborative robots into manual workstations decreases the physical workload of human workers and allows the worker to focus on tasks that require human-specific capabilities. Additionally, the risk of workplace injuries such as musculoskeletal disorders can be reduced. Workplace injuries are one of the major reasons for absenteeism and productivity loss in the manufacturing industry and are often caused by frequent repetitions of unhealthy postures over a long period of time (Makrini et al. Citation2019). Therefore, the vision of human-robot collaborative assembly is to increase quality, efficiency, flexibility, and productivity, while also improving ergonomic working conditions and reducing repetitive workload (c.f. (Müller, Vette, and Mailahn Citation2016; Bughin et al. Citation2018). From an economic perspective, various studies show that, if appropriately designed, human-robot collaborative assembly is beneficial for variable productions with frequent model and volume changes (c.f. (Takata and Hirano Citation2011)) and reduces overall production cycle times (Antonelli, Astanin, and Bruno Citation2017) as well as unit costs, while increasing flexibility (Krüger, Lien, and Verl Citation2009).
However, the degree of automation in manual assembly is still low. Even in the automotive industry, where the use of robots is well established, it is only at an estimated 20% (Steil and Maier Citation2020). One explanation for this discrepancy between the expected potentials and the dissemination in practice are several open challenges, e.g. the changed way of working when introducing collaborative robots in industrial manual assembly (Bruno and Antonelli Citation2018; Schmidbauer et al. Citation2020; Qian et al. Citation2020). Thus, it is necessary to rethink both assembly workplaces as well as organizational structures and processes (Tan et al. Citation2009). The challenges to be considered for the introduction of human-robot collaboration (HRC) can be classified into safety-related, planning and design, and human factors (c.f. (Villani et al. Citation2018)). The former two aspects, safety assessment and planning, are supported by the industrial study from (Gaede et al. Citation2018), based on interviews with robot manufacturers and system integrators. Regarding the safety assessment, the required application-individual risk assessment, the application of relevant safety norms in practice, and the costly as well as time-consuming approval and certification through inspecting authorities (see also (Schmidbauer et al. Citation2020)) were stated as key barriers. Among the planning aspects, the identification of HRC-suitable workstations, the workplace design, the determination of suitable process plans, and an efficient task allocation between humans and robots (Bruno and Antonelli Citation2018; Villani et al. Citation2018; Wang et al. Citation2019, Citation2020) were considered as the top challenges for implementing HRC (Gaede et al. Citation2018; Ranz, Hummel, and Sihn Citation2017). Also, a lack of robot programmers in small and medium-sized companies (Schmidbauer et al. Citation2020) as well as a lack of well-proven methods for the correct assessment of economic profitability (Bruno and Antonelli Citation2018) were argued in literature. Finally, human-centered technologies and human factors such as cognitive workload (e.g. by psychological assessment of operators’ well-being, acceptance, and human-centric design), collaboration fluency (e.g. by user-friendly programming approaches or natural, intuitive information exchange and communication methods), as well as trust (e.g. by well-proven, conducive safety mechanisms) complement the set of challenges (Darvish et al. Citation2018; Villani et al. Citation2018; Baltrusch et al. Citation2021).
Faced with those challenges of HRC, both research and industry have developed and proposed various approaches, such as intuitive and fast robot programming environments to enable robot programming for non-experts (Niermann et al. Citation2022), methods to improve safety or simplify and standardize safety assessments (Marvel, Falco, and Marstio Citation2015), procedure models to methodologically support planners when introducing collaborative robots (Peifer and Weber Citation2020; Petzoldt et al. Citation2021), methods to support assessment of economic profitability (Rally et al. Citation2020), technologies for intuitive bidirectional communication between humans and robots (Gustavsson et al. Citation2018; Mahadevan et al. Citation2021), psychological aspects in the context of a collaborative assembly, e.g. effects on human stress (Ender Citation2021; Wiese et al. Citation2022), and approaches for task allocation in HRC (see chapter 4 section 4). While many review publications on HRC and several dedicated survey publications address some of the mentioned issues (see chapter 2 for detailed analysis section 2), the proposed approaches for task allocation between humans and robots in hybrid assembly have not yet been reviewed.
The problem of task allocation in HRC mainly arises because both resources (humans and robots) obtain different skill sets. In manual assembly cells, human workers are largely equally suited for performing assembly tasks. Thus, their individual skills do not need to be considered, which reduces the allocation problem to workload balancing. However, in HRC, both resources have different strengths, capabilities, and limitations regarding the execution of different tasks that should be exploited as much as possible. Moreover, there is no need for workload balancing between humans and robots because robots are not affected by fatigue effects and are able to cope with a higher workload compared to humans (Antonelli and Bruno Citation2019, Citation2018). Instead, the individual skill sets should be taken into account for creating suitable process plans and efficient task allocation to humans or robots while considering and optimizing the overall objectives such as cycle times, costs, and quality (Bänziger, Kunz, and Wegener Citation2018; Zanchettin et al. Citation2019). Despite the fundamental importance of task allocation in enabling reasonable HRC and its potential to increase productivity (S. Kumar, Savur, and Sahin Citation2021), it remains an open research topic (c.f. (Beumelburg Citation2005; Sipsas, Nikolakis, and Makris Citation2021)). To approach this topic and related questions, this paper reviews existing approaches to human-robot task allocation in industrial assembly to provide an extensive overview of the topic for both research and industrial practice. More precisely, this review paper answers the following two research questions:
RQ1: What is the current state of the art of task allocation in human-robot collaborative assembly, and how can the existing approaches be classified?
RQ2: What criteria are used to decide on the allocation of assembly tasks between humans and robots?
The remainder of this paper is structured as follows: section 2 analyses previously published, related reviews in the field of human-robot interaction as well as assembly sequence planning, and highlights identified needs for further investigation. Section 3 explains the applied methodology for conducting this literature review. In section 4, the review results are presented by firstly providing a descriptive analysis of the identified publications, secondly categorizing and explaining the individual approaches and their respective task allocation procedures, and thirdly identifying the criteria applied for task allocation. Subsequently, in section 5, the different approaches are consolidated into a reference model and the results, the identified research gaps as well as future research directions are critically discussed. Finally, section 6 concludes this research with a summary.
2. Related work: overview of existing literature reviews on human-robot collaboration
In conjunction with the high expectations placed on HRC, it is a field of research that has gained much interest during the past decade, as reflected in the large number of published articles and reviews that address various aspects of the topic (c.f. (Hentout et al. Citation2019; Tsarouchi, Makris, and Chryssolouris Citation2016)). A total of 22 review and overview papers were identified in the related work, focusing on safety (10), human-robot interaction and communication technologies (8), application domains for HRC (3), robot programming and motion planning (5), metrics and measures for evaluating HRC (2), human factors (3), as well as task planning and allocation (1) (some reviews take into account several aspects). All review publications were recently published between 2016 and 2022, and are summarized in with respect to the reviewed aspect, distinguishing between focal topics of the respective review, indicated by ‘x’, and only marginally or briefly considered aspects marked by ‘(x)’. Here, two publications by the same authors with largely identical review content were aggregated in two cases. Further, it is worth mentioning that only eight out of the 22 identified publications conducted a systematic, thus reproducible, literature review (SLR). The following discussion of previous literature reviews on HRC is organized according to the order shown in .
Table 1. Overview of considered aspects in existing literature reviews on human-robot collaboration.
As follows from , most review publications consider safety aspects, interaction modalities, and communication technologies. Similarly, (Gualtieri, Rauch, and Vidoni Citation2021) identified safety as the most developed research category. While most publications specifically focus on one or two of the above-mentioned subjects, a few comprehensive extensive reviews, e.g. (Hentout et al. Citation2019; Wang et al. Citation2019, Citation2020; Zoltan and Dhir Citation2020), provide a good overview of the entire field of HRC and thus represent a good starting point into the topic. However, due to their wide review scope, those reviews are less detailed within the individual aspects compared to dedicated reviews. Worth highlighting is the work of (Hentout et al. Citation2019), which conducted a systematic literature review within the time period from 2008 to 2017 and considered a total of 300 articles within the field of HRC, clustered into 39 categories and sub-categories, covering all essential technological areas. Another interesting work was conducted by (Gualtieri, Rauch, and Vidoni Citation2021), which analyzes in a review of 55 papers within the years 2015 to 2018 the importance and influence of various technological sub-clusters for and on the aspects of safety, human factors, and ergonomics. In their review, they identified a vagueness and uncertainty in the research community regarding the definition of the terms safety and ergonomics (Gualtieri, Rauch, and Vidoni Citation2021).
Fundamental aspects and requirements regarding safety in HRC are covered by various of the identified safety-related review publications (Villani et al. Citation2018, Citation2018; Robla-Gomez et al. Citation2017; Galin and Meshcheryakov Citation2019 S. Kumar, Savur, and Sahin Citation2021). On the one hand, these publications present overviews and classifications of the general safety standards for HRC, which are grouped into A- (general aspects, risk assessment, and risk reduction), B- (functional safety for different technologies), and C-type (safety requirements and modes for safe human-robot interaction) standards. On the other hand, the publications provide a detailed description of the collaborative operation modes according to (DIN EN ISO Citation2011, Citation2011; ISO/TS Citation2016). Accordingly, the collaborative operation modes range from safety-related monitored stop to hand-guidance, speed and separation monitoring, and power and force limiting. Based on nine relevant articles from 2009 to 2020, (Hjorth and Chrysostomou Citation2022) perform an analysis of the respectively applied safety mechanisms and modes for the use-case of non-destructive disassembly. Here, speed and separation monitoring is identified as the most commonly applied approach. Research aspects for achieving safety objectives were classified into collision control methods (pre- and post-collision), motion planning measures, and action prediction algorithms (S. Kumar, Savur, and Sahin Citation2021). Further, methods for risk measurement and assessment are discussed in (Villani et al. Citation2018, Citation2018; Zacharaki et al. Citation2020). (Halme et al. Citation2018) focus on vision-based safety systems for HRC, aiming to analyze the readiness level of vision-based safety systems for industrial requirements by assessing the use-case flexibility, systems speed, and level of collaboration of 25 papers in total. (Gualtieri, Rauch, and Vidoni Citation2021) clustered the 35 identified articles that aim to improve safety into methods for contact avoidance and approaches for contact detection and mitigation. Afterward, they analyzed the importance level of research themes such as motion planning, simulation, assistance systems, safety management, sensor systems for object tracking, artificial intelligence, and robot system design for these clusters. They found a higher interest in prevention (methods that operate prior to potential contact) than in protection (methods to minimize effects of occurred physical contact) within safety-related research publications (Gualtieri, Rauch, and Vidoni Citation2021). Moreover, the use of machine learning methods to improve safety, e.g. by predicting collisions, was investigated by (Mukherjee et al. Citation2022). Interestingly, even though safety is known as a crucial aspect in HRC, (Arents et al. Citation2021) found in their systematic literature review of 46 papers that a quarter of all studies did not apply any of the above safety measures for cooperative operation. More than half did not even apply the safety standards when human and robot were collaboratively working on the same object.
Regarding the modalities for human-robot interaction and applied technologies for communication, one can distinguish between one-way and two-way (bidirectional) communication between humans and robots (Inkulu et al. Citation2021). Inkulu et al. (Citation2021) suggest that, depending on the proximity of the collaboration, different modalities and technologies for communication should be applied. User interfaces can be clustered into visual, auditory, and haptic communication, with the former including communication methods in virtual, augmented, and mixed realities (c.f. (Tsarouchi, Makris, and Chryssolouris Citation2016; Villani et al. Citation2018, Citation2018; Hjorth and Chrysostomou Citation2022 S. Kumar, Savur, and Sahin Citation2021)). Human-to-robot communication methods can be classified into explicit (i.e. the human commands the robot) and implicit (i.e. the robot interprets the human state) approaches (S. Kumar, Savur, and Sahin Citation2021). The advantages and disadvantages of the different modes of input were analyzed by (Mukherjee et al. Citation2022). (Arents et al. Citation2021; Inkulu et al. Citation2021) analyzed different kinds of sensors and devices used for human-to-robot and robot-to-human communication and concluded that 3D cameras (c.f. (Halme et al. Citation2018)) and force/tactile sensors are the most commonly used sensors (Arents et al. Citation2021). Also, the information monitored using these sensors is examined. To collect information about the human worker during task execution, algorithms for human detection and tracking, gesture recognition, speech recognition, human physiology recognition, and facial recognition as well as force detection methods on robot side are applied and used as an input for motion planning and collision avoidance algorithms. Additionally, (Dianatfar, Latokartano, and Lanz Citation2020) investigated the use of virtual (VR) and augmented reality (AR) in HRC by assessing 19 articles that propose such solutions, and analyzing the tools and hardware devices to enable VR/AR.
The topics of robot programming and motion planning for HRC are of fundamental importance for enabling the usage of robots in collaborative scenarios. Due to the presence of the human operator, motion planning needs to adjust or react accordingly to human movements. The central role of motion planning and control, along with safety and communication, is pointed out as an essential prerequisite for HRC by the review of (Gualtieri, Rauch, and Vidoni Citation2021). They found that most of the reviewed articles (25 out of 55 articles) are related to motion planning and control. In addition, they analyzed the importance of motion planning and control for safety-related aspects (contact avoidance, contact detection, and mitigation) and for human factors (physical ergonomics, cognitive and organizational ergonomics) and found that motion planning and control was the only topic of importance for all aspects. Furthermore, robot programming approaches, architectures, and frameworks in the context of HRC have been reviewed by (Zoltan and Dhir Citation2020; Villani et al. Citation2018, Citation2018; Tsarouchi, Makris, and Chryssolouris Citation2016) with various proposed classifications of programming approaches (c.f. (Petzoldt et al. Citation2021)). Moreover, a dedicated review on robot learning strategies for HRC was conducted by (Mukherjee et al. Citation2022), covering supervised, unsupervised, and reinforcement learning techniques and focusing especially on learning by demonstration.
Application scenarios of HRC are marginally considered in some of the mentioned reviews, e.g. (Arents et al. Citation2021; Dianatfar, Latokartano, and Lanz Citation2020; Gualtieri, Rauch, and Vidoni Citation2021) – typically by mentioning the use case for the individual approaches in a table. However, since the publications are screened and filtered according to relevant criteria for the considered specific topic of the review, they only cover a partial subset of the HRC applications. In contrast, three review publications (Eloise et al. Citation2019; Inkulu et al. Citation2021; Villani et al. Citation2018) directly address application scenarios for HRC. The industrial use-cases of handling, welding, assembly, and automotive (Villani et al. Citation2018), or assembly, human assistant, quality control, and machine tending (Eloise et al. Citation2019), respectively welding, assembly, inspection, and other (material handling, palletizing, painting) (Inkulu et al. Citation2021) were found as application fields for HRC in industry; with assembly being the most studied task (Eloise et al. Citation2019). Moreover, based on a review of 41 articles (35 unique use cases) from 2009 to 2018 (Eloise et al. Citation2019) identified the automotive industry (23% of studies) and the electronics industry (17% of studies) as the major industrial sectors.
The consideration of human factors and ergonomics in HRC has been growing significantly in recent years (c.f. (Gualtieri, Rauch, and Vidoni Citation2021)). This is also reflected by the number of review papers related to human factors: While (Villani et al. Citation2018) only shortly mentioned the importance of taking into account human factors, such as mental stress and anxiety induced by close interaction with robots in their survey paper from 2018, recent systematic literature reviews on the topic of human factors in HRC were conducted and published in 2020 and 2021 (Baltrusch et al. Citation2021; Zoltan and Dhir Citation2020; Gualtieri, Rauch, and Vidoni Citation2021). By analyzing nine exploratory studies and reviews on this subject, (Baltrusch et al. Citation2021) dedicatedly examined the effects of HRC on aspects of job quality. They identified four relevant categories encompassing both social and psychophysical aspects, i.e. cognitive workload, collaboration fluency, trust, as well as acceptance and satisfaction. Regarding collaboration fluency, (Baltrusch et al. Citation2021) highlight the importance of adapting to the human. Similar aspects of human factors were also pointed out by (Zoltan and Dhir Citation2020), who identified in their general review of 87 articles on HRC in production a total of 16 papers covering human-centered subjects. Those were categorized into eight categories: adaptation, leadership, trust, workload, attitudes, frameworks, exchange force, and holding force (Zoltan and Dhir Citation2020). (Gualtieri, Rauch, and Vidoni Citation2021) categorize human-centered aspects into physical, cognitive, and organizational factors and conclude in their review that related topics to human factors are considered emerging but not yet mature (Gualtieri, Rauch, and Vidoni Citation2021). They also emphasized the need and importance of respective developments for cognitive and organizational support, aiming to increase trust and acceptance, which represent a major factor for the efficiency of a collaborative human-robot production system (Gualtieri, Rauch, and Vidoni Citation2021). Even though (Arents et al. Citation2021) did not focus on human factors in their review, they highlighted the importance of both proper safety systems and well-established bidirectional communication methods for achieving trust. This requires explainable, predictable, and understandable robot actions (Arents et al. Citation2021).
For assessing the performance of a collaborative workstation, metrics and measures are required. The review on evaluation metrics from (Nelles, Th Kwee-Meier, and Mertens Citation2019) identified a total of 30 publications addressing this subject and proposes a clustering of the identified metrics into those for measuring human well-being and human-robot system performance. They divide methods for measuring those metrics into questionnaire-based methods and psychophysical measurement methods (Nelles, Th Kwee-Meier, and Mertens Citation2019). (Marvel et al. Citation2020) present an even more comprehensive collection of metrics and measures for the evaluation of human-machine interfaces and human-robot interaction. They suggest sets of quantitative (33 different metrics) and qualitative (21) metrics for evaluating HRC. These metrics consider the assessment of characteristics related to either the team, the operator, the robot, or the process. Moreover, a list of objective measures, including 19 metrics to evaluate the three criteria of safety, performance, and productivity of human-robot collaborative processes, is specified in (S. Kumar, Savur, and Sahin Citation2021).
Finally, some reviews that consider the aspect of task sequence planning and task allocation could be identified. However, most of those reviews only marginally consider task allocation and focus on one of the topics mentioned above (Hjorth and Chrysostomou Citation2022; Gualtieri, Rauch, and Vidoni Citation2021) or provide a general overview of the research field of HRC (Hentout et al. Citation2019; Wang et al. Citation2019, Citation2020; Zoltan and Dhir Citation2020). Thereof, (Zoltan and Dhir Citation2020) shortly mentioned five approaches for task allocation, (Hentout et al. Citation2019) identified and discussed twelve papers considering task allocation and scheduling without giving more profound insights into the methodological approaches or decision logics for task allocation. (Hjorth and Chrysostomou Citation2022) only binary checked if task sequence planning is included in the analyzed articles on disassembly. (Gualtieri, Rauch, and Vidoni Citation2021) identified nine publications on task scheduling strategies but only analyzed the aspect’s overall importance for safety and human factors without describing the approaches themselves. Only one review explicitly addresses task planning, namely the work of (Tsarouchi, Makris, and Chryssolouris Citation2016), which considers publications up to 2015 on the topics of task planning and robot programming. However, this work has a stronger focus on robot programming approaches than on task allocation and only considers publications from the years 2005 to 2015. Furthermore, (Tsarouchi, Makris, and Chryssolouris Citation2016) did not perform a systematic literature review.
Apart from HRC, various reviews on assembly sequence planning, scheduling, or line balancing have been published for fully manual or fully automated assembly, e.g. (Soumen and Gagnon Citation1989; Rashid, Hutabarat, and Tiwari Citation2012; N. Kumar and Mahto Citation2013; Lihui et al. Citation2009). Also, multi-robot task allocation is a well-researched topic with various reviews and taxonomies being proposed and published in the last decades, e.g. (Gerkey and Matarić Citation2004; Khamis, Hussein, and Elmogy Citation2015; Seenu et al. Citation2020). However, these reviews, as well as the discussed approaches therein, do not consider HRC and are consequently not applicable for human-robot collaborative assembly due to the different capabilities and characteristics of the two resources and the limited predictability of human behavior, resulting in greater complexity in the workplace (c.f. (Bänziger, Kunz, and Wegener Citation2018)).
In summary, all related reviews either consider approaches for task allocation only in a short section, identify only a limited number of related papers, do not consider recent research on task allocation due to their earlier publication date, or just consider manual or automated assembly without taking into account the collaboration between humans and robots. Hence, a systematic literature review on task allocation approaches for human-robot collaborative assembly is a research gap requiring further investigation, which is addressed in the systematic review conducted in the paper at hand.
Thus, the objective and contribution of this paper is to provide a comprehensive overview of task allocation approaches for human-robot collaborative assembly through a systematic literature review. The identified approaches are categorized and analyzed in terms of the methods and allocation logics applied, as well as the criteria used as a basis for decision-making.
3. Review methodology and literature selection strategy
The systematic literature review (SLR) methodology used in this work is structured by following the approach from (Vom Brocke et al. Citation2009). This method was chosen because of its well-defined and recipe-alike reviewing structure that covers all important phases within a literature review instead of mainly focusing on analysis and synthesis steps (Osterrieder, Budde, and Friedli Citation2020). Therefore, it is frequently used in the research community for conducting SLR and has recently been applied for various literature reviews on topics related to Industry 4.0, e.g. smart factories (Osterrieder, Budde, and Friedli Citation2020), digital twins (van der Valk et al. Citation2020), or cyber-physical production systems (Xuan, Goepp, and Siadat Citation2020). The literature reviewing methodology by (Vom Brocke et al. Citation2009) comprises five main phases – (I) definition of review scope, (II) conceptualization of topic, (III) literature search, (IV) literature analysis and synthesis, and (V) research agenda –, which ensure reproducibility of this review. The five phases are detailed in the following.
3.1. Definition of review scope
In the first phase, the scope and flavor of this literature review are defined in accordance with (Vom Brocke et al. Citation2009). According to the characteristics and categories presented in the taxonomy of literature reviews proposed by (Cooper Citation1988), the six components (1) focus, (2) goal, (3) organization, (4) perspective, (5) audience, and (6) coverage are defined. Regarding the focus (1), the research outcomes and their practical application are considered, with the goal (2) of summarizing the findings in a categorized way. The procedure in this review is methodological, but by grouping and categorizing publications that propose similar approaches, this review is more conceptual regarding its organization type, as categories are proposed, existing types of approaches are discussed, and a reference model is derived in section 5 (3). To provide an objective and unbiased review, the findings are represented in a neutral manner (4). As mentioned earlier, this review addresses both researchers and industrial practitioners interested in efficient HRC in assembly (5). Finally, a complete coverage of the relevant literature (6) is provided, although certain limitations implicitly arise from the selection of literature databases and languages considered.
3.2. Conceptualization of topic
The second phase comprises the conceptualization of the topic (Vom Brocke et al. Citation2009) with the target of narrowing down the considered subject and identifying potential keywords that can be used as search terms and expressions for the literature search conducted in phase (III). Referring to HRC in general, the respective related reviews were analysed to ensure a broad consideration of the topic in the first place, as presented in section 2, and relevant key expressions as well as synonymously used terms were identified. For instance, the terms ‘robot’ and ‘machine’, ‘collaboration’ and ‘cooperation’, ‘task’ and ‘process’, as well as ‘planning’, ‘allocation’, ‘assignment’, ‘distribution’, and ‘scheduling’ are not used consistently in the literature. Hence, those were defined as synonymous search terms to ensure a broad coverage of literature.
3.3. Literature search
Following (Vom Brocke et al. Citation2009), the literature search process is conducted in the third phase. This includes four steps: (1) the selection of relevant journals covering the identified research subject and, based on this, (2) the selection of appropriate databases containing these journals. Then, (3) defining search strings and conducting the keyword-based literature search in the identified databases. In addition, (4) conducting a forward and/or backward search, as shown in . Moreover, only peer-reviewed publications (basic quality criteria) (Rowley and Slack Citation2004) from relevant journals on the topics of smart manufacturing and human-machine interaction, as well as proceedings of renowned conferences of this community, are considered as sources for the search process. Based on the relevant journals, the databases for the keyword-based literature search were selected. Here, the possibility of an advanced search using Boolean operators to narrow down the search was defined as a requirement, as recommended by (Rowley and Slack Citation2004). Therefore, Scopus was chosen as a search database because of its broad coverage and access to the identified relevant journals from various publishers (e.g. Elsevier, Springer, Taylor & Francis, Emerald, MDPI, IEEE) as well as well-known conferences (e.g. CIRP). In addition, IEEE Xplore is used to ensure full coverage of IEEE conferences, identified in phase II.
Figure 2. Literature search process (in accordance with (Vom Brocke et al. Citation2009)).
Next, search strings were defined that are composed of the search terms shown in . Those were entered in both databases in the respective syntax with the search limited to title, abstract, and keywords, as given in . The database search was conducted on 27th January 2022, and its results were exported to an MS Excel document. With the first and second search terms, the overarching topic area is delineated and specified to the investigation framework of the cooperation between humans and robots. The third and fourth search terms limit the research field to the main investigation aspect of task allocation. Modified spellings of the search terms are taken into account by using wildcards (*). Regarding the use case of (industrial) assembly, the articles were narrowed down as part of the screening process (phase IV) to avoid premature exclusion of articles through the selected key terms.
Table 2. Search terms and query strings utilized for keyword-based literature search in databases.
After reviewing and selecting the full-text articles, a forward (literature citing the articles) and backward (literature cited in the articles) search (c.f. (Webster and Watson Citation2002)) was performed for publications classified as highly relevant, which then complemented the considered literature.
3.4. Literature analysis and synthesis
A four-step filtering process with the articles found from the initial search query was conducted. Initially, all duplicates were removed, followed by three content-related screening rounds. Publications for the period up to early 2022 were included due to the date of the database search. For each screening round, articles were either classified as out-of-scope or assigned a relevance (low, medium, or high). Out-of-scope articles were excluded in each case, while the relevance rating was updated in each filtering round. In the first round, the screening was based on title and abstract, aiming to exclude out-of-scope records, which was done subjectively, relying on the authors’ expertise. Next, overviews, reviews, and commentaries were excluded, and only articles written in English or German were included due to the authors’ language skills. Further, only references published in journals or conference proceedings with a peer-review process were considered to meet the quality criterion for articles included in this review. In the second screening round, the full-texts of the publications were accessed, inaccessible articles were excluded, and the eligibility was assessed by skimming the respective articles. Here, for instance, articles that do not consider assembly, e.g. (Fiore, Clodic, and Alami Citation2016), who investigate the task of cleaning a set of furniture, or records that only mention the task allocation topic in passing, were excluded. Nevertheless, as some of these articles present relevant aspects for the subject of task allocation and human-robot collaboration in a wider context, these are still briefly analyzed and discussed in section 5.3, especially with regard to potentials for combination and improvement of current solutions as well as known issues and open challenges. In the third filtering round, a more in-depth analysis was conducted by reading the articles in detail to assess the final relevance based on the preliminary relevance determined in the previous stages. For instance, articles with low or medium relevance represent either early publications from the same authors of already included approaches (i.e. similar, less detailed articles) or approaches in which the human fully needs to decide on the task allocation, e.g. by pressing interaction control buttons that trigger either human or robot task execution as in (Maurtua et al. Citation2016). Such approaches are excluded as the scope of this review paper is on methodological, systematic methods, and decision logics for task allocation. Therefore, in this final filtering stage, only records marked with high relevance and relevant references from the forward and backward search (see above, phase III section 3.3) were included in the set for the qualitative literature analysis.
Following the idea of a concept matrix by (Webster and Watson Citation2002 Vom Brocke et al. Citation2009), the resulting final set of publications was analyzed by categorizing them into two main categories – static and dynamic task allocation approaches (in accordance with the distinction into offline or online allocation proposed in (Darvish et al. Citation2018)) – and four sub-categories (concepts) derived by the authors in group discussions (see section 4.1). For further analysis, relevant characteristics of the approaches proposed in the articles were extracted, with minimal differences depending on the respective sub-category. In common, a short description of the methodology for task allocation, the possibility of parallel task execution by humans and robots, the utilized core criteria for task assignment, and the consideration of algorithms for optimizing the process plan or the task distribution were extracted. These characteristics were developed in discussions between the authors based on the knowledge gained during the literature filtering process.
3.5. Research agenda
Finally, after analyzing and describing the approaches, a reference model for task allocation methods was derived based on the common methodologies of the identified approaches, and the limitations of current approaches were discussed. In addition, research needs were derived and discussed. This responds to the suggestion of (Webster and Watson Citation2002; Vom Brocke et al. Citation2009) that literature reviews should lead to a sharper research agenda.
4. Results
From the initial keyword-based database search, a total of 521 articles were found after removing the duplicates. After the filtering process, 24 articles remained with high relevance, for which the performed forward and backward search led to 13 additional articles, thus resulting in a total of 37 records included in this literature review. The entire literature search and filtering procedure is shown in . The included articles are presented for each sub-category in .
Figure 3. Flow chart of literature search and filtering procedure conducted in this review.
Table 3. List of top ten most cited papers (data retrieved from Google Scholar on 10th February 2022) on task allocation for human-robot collaborative assembly.
Table 4. Characteristics of static suitability assessment-based task allocation approaches.
Table 5. Characteristics of static simulation-supported, capability-based allocation approaches.
Table 6. Characteristics of reactive and ad-hoc approaches for dynamic task allocation.
Table 7. Characteristics of proactive approaches for dynamic task allocation.
Table 8. Analysis of utilized criteria for task allocation in included references.
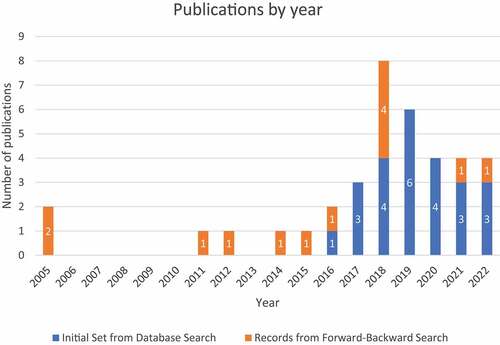
With the relevant articles included in the review, the distribution of the scientific contributions over the years was analyzed (). After a few pioneering publications on the subject, e.g. the dissertation by (Beumelburg Citation2005) in 2005, the topic has been gaining increasing interest since 2016. Noteworthy are the four relevant publications found for the year 2022, as the database search was conducted in January 2022, indicating that the research field remains highly relevant.
Figure 4. Number of publications per year on task allocation for human-robot collaborative assembly.
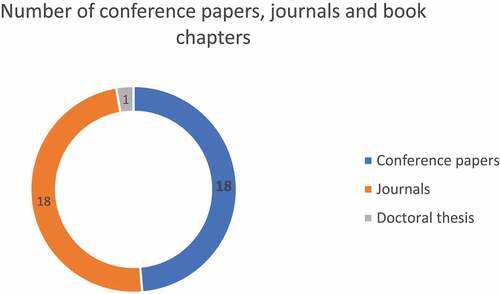
As shown in , the number of conference papers (19) and journal papers (18) is almost leveled, underlining the identified importance of the topic as well as the advanced development stage of some approaches. For both conferences and journals, only very few articles were published in one and the same medium. Instead, the identified articles were published widely spread in a variety of well-known conferences and journals, mainly dealing with smart manufacturing or robotics. While this underlines the relevance for a broad audience, it also reveals a lack of specialized conferences or special issues dealing with task allocation between humans and robots or, more generally, with collaborative assembly.
Figure 5. Number of conference papers, journal articles, and dissertations.
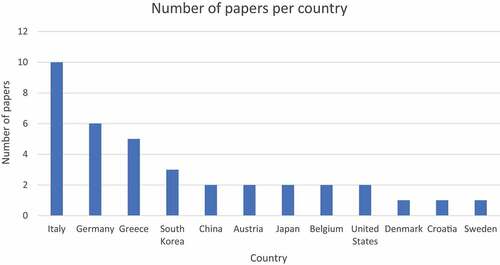
The included 37 papers were written by a total of 130 contributors, resulting in an average of 3.42 authors per publication. Regarding the countries of publication, researchers from institutes in Italy, Germany, and Greece published the most contributions with a share of 57% (21/37) of all included publications, as shown in . This refers not only to the quantity but also to the relevance of the corresponding publications from these countries, which account for 80% of the ten most-cited publications (five from Germany, two from Greece, one each from Italy, Denmark, and the United States). Here, it is noteworthy that only the affiliation of the first author was taken into account when analyzing the number of publications per country. The list of the top ten most cited contributions, with their respective citation count retrieved from Google Scholar on 10th February 2022, is presented in .
Figure 6. Number of included publications per country.
4.1. Current state of the art of task allocation in assembly: methods and classification (RQ1)
The problem of task allocation between humans and robots consists of several sub-problems that need to be addressed. First, the decision for each individual process step, whether human, robot, or both together should perform the task, must be made. This decision can be made either based on the isolated process step or by including knowledge about the entire pending process. Second, this leads to questions concerning the chronological order in which the process is executed. The given input information for addressing this issue is typically an assembly process sequence (e.g. assembly priority graph), containing the logical sequence of the overall process. For purely sequential assembly processes, the execution order is given and does not need to be taken into account for task allocation. However, for assembly processes in which the parallel execution of sub-processes is possible, e.g. for several sub-assemblies that are prepared in parallel and finally integrated into the overall component, the execution order is not completely predetermined. Instead, a pool of possible subsequent tasks is available from which to choose. Third, in collaborative assembly, obstructions and collisions between the human and the robot as well as delays or failures during the process runtime can occur. Both affect the feasibility or execution time of the process and should be considered in holistic task allocation approaches. These sub-problems must be taken into account in order to best achieve enterprise objectives (e.g. time, costs, quality, flexibility, ergonomics) and to exploit the potential and advantages of HRC in assembly.
Several approaches have been published to address these issues, among which the authors of this review identified two superordinate categories and two sub-categories for each. As mentioned above, this review paper generally distinguishes between static and dynamic task allocation approaches. Static (or offline) methods tackle the problem of task allocation prior to the actual execution of the assembly, i.e. once the task allocation has been defined for the process, it cannot be changed during execution. On the contrary, the final allocation of tasks in dynamic (or online) approaches takes place during the assembly, allowing the current situation to be taken into account.
Thus, the considered publications and corresponding approaches were classified into this proposed taxonomy as shown in . 19 papers suggest static allocation methods, while 18 articles consider dynamic task allocation. Also, the number of approaches that apply optimization algorithms to refine the task schedule is indicated in . In the following, the general idea for the allocation logic for each of the individual approaches is presented, starting with the static and followed by the dynamic approaches. Also, the respectively identified sub-categories are explained in the following.
Figure 7. Categorization of task allocation approaches including number of considered publications per category.
4.1.1. Static task allocation
Static approaches typically apply different criteria to calculate the suitability of a resource (human or robot) for certain processes or task types. Here, some approaches are solely based on those prior defined criteria to find a suitable task allocation plan, while other approaches additionally utilize, at a later stage, a simulation to check, refine, or optimize the task allocation plan. Therefore, a classification of static task allocation approaches into suitability assessment-based allocation approaches and simulation-supported, capability-based allocation approaches is proposed.
4.1.1.1. Task allocation based on suitability assessment
As a common baseline of the identified approaches, the suitability of humans and robots is compared with the requirements of the tasks within assembly processes (suitability-check). Then, additional but optional, more general criteria are applied to assess the reasonableness of the allocation to a respective resource (reasonableness-check). Finally, a decision logic is applied that takes the complete assembly process into account and decides on the task allocation of the overall process (task allocation logic). In addition, a few approaches apply optimization methods in a last step to refine the initial task allocation plan (plan optimization). The output is, in each case, a static process plan to be executed in a fixed manner by the resources.
For calculating suitability, a straightforward approach is to rely on human workers for tasks that are too expensive to automate (Antonelli, Astanin, and Bruno Citation2017). Some approaches follow this idea by assessing the automation potential of individual process steps, e.g. (Malik and Bilberg Citation2019; Yuan et al. Citation2021). However, this fundamental idea of relying on humans for hard-to-automate tasks leads to the risk that the human worker is degraded to a stopgap or appendage of the automation (Lotter and Wiendahl Citation2012), which must be prevented for a successful implementation of HRC, especially with regard to workers’ acceptance.
Therefore, methods have been proposed that conduct a qualitative pair-by-pair comparison of the capabilities of both resources, e.g. the assessment of advantages and disadvantages of both resources for each process step (Müller, Vette, and Mailahn Citation2016). These methods mainly aim at a fast assessment and creation of a possible process plan, which, however, is most probably not optimal on the one hand and subjective on the other.
To overcome subjectivity, other approaches have been proposed that aim to objectify the decision and mapping of tasks to suitable resources using criteria catalogues in combination with a quantitative rating system, e.g. (Beumelburg Citation2005; Ranz, Hummel, and Sihn Citation2017; Schmidbauer et al. Citation2020) or other quantitative ranking methods for multi-criteria decision analysis, e.g. analytic network process (ANP) (Liau and Ryu Citation2020) and decision trees (Antonelli and Bruno Citation2018).
Thus, based on (Ranz, Hummel, and Sihn Citation2017), methods for the suitability calculation can be distinguished between three fundamental approaches:
assessment of automation potential (objective quantification of robot’s suitability),
qualitative suitability assessment or comparison of capabilities (subjective, but quick orientation), and
calculation of capability indicators (more objective quantification of both resources).
Regarding the task allocation decision logic, the existing approaches either let the human decide on a process plan based on the process-specific suitability information, e.g. (Müller, Vette, and Mailahn Citation2016; Schmidbauer et al. Citation2020), or suggest a more defined decision procedure based on the given suitability and additional information, such as availability or time. Here, some approaches preferentially assign tasks to either the human, e.g. (Antonelli and Bruno Citation2018) or the robot, e.g. (Malik and Bilberg Citation2019), in case of ambiguous pre-assignments. To further advance towards an optimal static process distribution, some approaches apply optimization methods to refine the process plan in terms of time (Liau and Ryu Citation2020; Beumelburg Citation2005; Lee et al. Citation2022; Amir, Fathi, and Ng Citation2022; Liau and Ryu Citation2022), capability (Beumelburg Citation2005), costs (Takata and Hirano Citation2011), or multi-criteria utility functions (Evangelou et al. Citation2020).
A brief description of each analyzed reference within the sub-category ‘task allocation based on suitability assessment’ in terms of their approach for suitability assessment and the task allocation logic applied is provided in .
4.1.1.2. Quantitative summary
A brief quantitative summary of the characteristics of the approaches presented in is provided in the following: Most approaches (11/14, 79%) consider a parallel execution of tasks by humans and robots, while three only allow sequential execution of tasks. About half of the approaches (8/14, 57%) conduct a posterior optimization of the process to minimize, e.g. cycle time or maximize exploited capabilities. Regarding the methodologies utilized within the suitability assessment, most references suggest quantitative methods for the capability calculation of both resources (6/14, 63%). The actual task allocation for the overall process is then conducted either completely manual, using previously collected information as a decision basis (5/14, 36%), or supported by an explicit decision logic (6/14, 43%), or automatic as part of schedule optimization (3/14, 21%).
4.1.1.3. Simulation-supported, capability-based task allocation
The previously presented analytical approaches do not allow, despite the application of optimization algorithms in some publications, a validation of the resulting process prior to process execution. Therefore, an extension by simulation environments have been proposed by a number of references. Approaches within this sub-category are still static task allocation methods, i.e. their output is a fixed assembly process plan. However, the advantage of using a simulation is that the dynamics of the interaction between the worker and the robot in their shared workplace can be considered when evaluating different tasks assignments and schedules (Bänziger, Kunz, and Wegener Citation2018).
The focus of the identified publications within this sub-category is mostly on the introduction and use of the simulation environment. Thus, less detail is given to the capability assessment or the task distribution logic itself, or more simplistic approaches are used for this, e.g. by using only binary values to represent resource capabilities for task execution, which express whether a resource is capable in principle, but not whether execution by the respective resource is appropriate (Komenda, Ranz, and Sihn Citation2019; Bänziger, Kunz, and Wegener Citation2018; Heydaryan, Suaza Bedolla, and Belingardi Citation2018). The simulation is either utilized to evaluate and compare different assembly task allocation schedules (Michalos et al. Citation2018; Tsarouchi et al. Citation2017) or combined with an optimization approach (Komenda, Ranz, and Sihn Citation2019; Bänziger, Kunz, and Wegener Citation2018). Also, the workplace layout, e.g. the position of the robot, can be optimized in simulation for a given assembly process allocation (Heydaryan, Suaza Bedolla, and Belingardi Citation2018; Tsarouchi et al. Citation2017; Michalos et al. Citation2018).
A brief description of the different simulation-supported approaches and their characteristics, highlighting in particular the purpose of the simulation, is given in .
4.1.1.4. Quantitative summary
As follows from , the simulation is used for workplace layout optimization and visualization (3/5, 60%), and for evaluating additional parameters for task allocation (4/5, 80%), including the estimation of the actual resource movements by using a digital model of both human and robot (2/5, 40%). The digital human model thus enables, on the one hand, the identification of possible collisions or obstructions leading to potential delays during task execution and, on the other hand, the assessment of ergonomics criteria. While some approaches automatically generate alternative task distributions as input for the assessment in the simulation (2/5, 40%), others rely on a predefined input of task allocation alternatives to be evaluated (3/5, 60%).
4.1.2. Dynamic task allocation
As shown in the previous section, static task allocation approaches aim to find a reasonable or even optimal task sequence offline, which is then exactly followed by robots and humans during execution. However, the reliability of the actual execution of an offline task allocation plan is limited due to uncertainties and changes in the workspace as well as unpredictable events and human decisions (Darvish et al. Citation2018). This might be caused by a wide range of reasons, e.g. due to safety-related evasive movements or speed reductions for collision avoidance, stops caused by unintentional contact with workers, expertise- or health-related performance differences among individual workers, attention-, motivation- and fatigue-related performance variations throughout the day, or restrictions in robot perception (Wang et al. Citation2019; Chen et al. Citation2014; Antonelli and Bruno Citation2019; Faroni et al. Citation2020). Even though some of these aspects, such as collision avoidance movements, are addressed and estimated by the aforementioned simulation-supported methods, the actual uncertainties introduced by the human in the process (Wang et al. Citation2019) cannot be modeled. Especially in non-standardized productions that are characterized by small lot sizes, outages are frequent, and the time spent on the individual task can have high variability resulting in offline optimized task assignments to become ineffective and sub-optimal (Antonelli and Bruno Citation2019).
Therefore, dynamic task allocation approaches have been proposed in the literature to circumvent the problem of under-specification by adapting to a world of change (Hancock and Scallen Citation1996), aiming to increase flexibility and overall success rate of collaborative assembly processes (Darvish et al. Citation2018).
The identified references for dynamic task allocation can be classified into two main categories, namely reactive and ad-hoc task allocation and proactive task allocation. Reactive allocation approaches follow a centrally orchestrated and monitored task allocation plan, which is reactively adjusted as changes occur or apply an ad-hoc allocation logic. In contrast, proactive approaches let the human take the lead in the assembly process, and the system then dynamically decides which work steps the assisting robot can perform in anticipation to proactively support the human worker. The following sections describe the two categories in more detail.
4.1.2.1. Reactive and ad-hoc task allocation approaches
Reactive task allocation approaches have a central planning instance in common, which assigns tasks to the human or the robot. Two types of methods have been identified within this sub-category: First, some approaches are based on an initial plan that is dynamically adapted in case of disturbances, e.g. by changing individual assignments (Antonelli and Bruno Citation2019; Pupa and Secchi Citation2021; Tsarouchi, Makris, and Chryssolouris Citation2016), or by triggering a re-planning of all remaining tasks (Faroni et al. Citation2020; Cesta, Orlandini, and Umbrico Citation2018; Darvish et al. Citation2018; Nikolakis et al. Citation2018; Johannsmeier and Haddadin Citation2017). In the second type, the allocation is solely based on an ad-hoc decision logic for allocation, which is applied online for assigning each task, e.g. based on the task classification (Makrini et al. Citation2019; Bruno and Antonelli Citation2018), or based on human fatigue (Messeri et al. Citation2022). However, it is worth mentioning that these approaches can merge and overlap, particularly when an ad-hoc logic is applied for task reassignment in case of deviations from the initial plan.
Further, reactive approaches of the identified references differ in terms of decision-making authority. While some approaches are suggestion-based, allowing the human to decide whether or not to perform the assigned task, e.g. (Faroni et al. Citation2020; Messeri et al. Citation2022), most follow a command-based methodology, where the decision-making authority belongs to the central task planning system, e.g. (Antonelli and Bruno Citation2019; Nikolakis et al. Citation2018).
To adapt and react to changes from plan execution or even to trigger ad-hoc allocation logic, monitoring the process execution to detect the completion of an assembly process step is required. This state information is gathered from the robot controller for the robot’s task execution. For human tasks, the confirmation of task completion can be detected either automatically by monitoring the assembly workplace to track and classify human actions, e.g. (Darvish et al. Citation2018), or manually by confirming task execution, using gestures or physical, respectively digital buttons, e.g. (Faroni et al. Citation2020).
In contrast to static task allocation approaches, dynamic approaches are limited in terms of computation time as the final decision on an allocation is not made prior but online during assembly task execution. Therefore, genetic optimization algorithms, such as those applied by (Beumelburg Citation2005; Liau and Ryu Citation2020; Takata and Hirano Citation2011), which require significant computation times until convergence, cannot be applied. Thus, a key requirement of corresponding dynamic algorithms is the need to be computationally efficient. Consequently, the existing reactive and ad-hoc allocation approaches are based on rather simple online decision logics.
A brief description of the reactive and ad-hoc task allocation approaches is provided in .
4.1.2.2. Quantitative summary
From the included references within this sub-category, the vast majority (8/12, 67%) rely on an initial task allocation plan which is calculated offline and only adapt this plan in the event of plan deviations, e.g. due to delays. The remaining approaches directly apply an ad-hoc logic for task allocation online, following rather simple decision logics (3/12, 25%), or even argue to be able to conduct optimization of the task allocation directly online (1/12, 8%, (Chen et al. Citation2014)). 42% (5/12) of the considered approaches perform an (offline) optimization of the task allocation to account for additional criteria, such as cycle time or workload, mostly based on tree search algorithms. Different from the approaches discussed in the previous sub-category, here, only one approach (10%) uses a simulation environment within the task planning methodology to calculate the value of a utility function as input for an optimization algorithm. The suitability assessment in this sub-category is rather simple, despite the fact that most approaches rely on an initial plan. However, as the approaches focus on the dynamic online adaptation methodology, the suitability assessment is given less attention. As a result, 75% of the approaches (9/12) rely on a fully manual, qualitative capability assessment, respectively, task classification, or do not even mention the suitability assessment at all. The remaining quantitative suitability calculation methods are mostly based on approaches that were presented in previously published work (17%, 2/12).
4.1.2.3. Proactive task allocation approaches
In each of the three sub-categories presented above, approaches are described in which the planning and distribution of assembly tasks is carried out by a central planning instance. However, the planning of assembly tasks in dynamic environments can also be driven by the human (c.f. (Fiore, Clodic, and Alami Citation2016)). In such approaches, the human takes on the role of the team leader (H. Liu et al. Citation2019) and independently performs self-selected assembly tasks, while the robot aims to support the human by proactively selecting tasks that can be performed in parallel as preparatory work for subsequent steps to faster achieve the joint goal of completing the entire assembly process. The idea for such assembly process execution is inspired by human teamwork, as humans are able to act proactively and assist others by predicting their intentions before help is actually requested (Kwon and Hong Suh Citation2012).
To be able to anticipate the human’s intentions, these proactive task allocation approaches require continuous monitoring of the assembly execution in combination with human movement prediction algorithms, movement interpretation, and task classification (c.f. (Clodic et al. Citation2017)). The monitored information on the currently executed tasks and the state of the human operator is then utilized for the proactive selection of useful auxiliary actions or process steps based on the task model representation (H. Liu et al. Citation2019), e.g. based on an assembly priority chart.
Since the intention prediction and action selection need to be performed online and as quickly as possible, a key requirement for the algorithms is real-time capability. Another challenge is the uncertainty handling and temporal synchronization of the task execution. On the one hand, the waiting time should be minimized by quickly deciding on the execution of an auxiliary action, while, on the other hand, a high probability of correctly predicting the intended human action and its temporal end is desirable. To address these issues of timing and uncertainty handling, the approaches for proactive task allocation suggest different degrees of proactivity for the robot’s behavior. Two extremes were identified: Either the robot’s maxim is to be minimally disruptive to humans, forcing the robot to idle in the case of a high probability of causing human waiting times, e.g. (Zanchettin et al. Citation2019), or the robot is more active and prefers to perform a wrong task rather than idling, despite possible human disruption. For the latter, i.e. performing robot tasks even under high uncertainty, (Schrempf et al. Citation2005) propose a trial-and-error logic for supportive tasks and (H. Liu et al. Citation2019) suggest to select tasks that do not affect the human. Also, tradeoffs between robot idling and execution have been proposed, e.g. based on a cost function that penalizes both extremes (Hawkins et al. Citation2013) or by an adjustable reward function (Cramer, Kellens, and Demeester Citation2021).
For estimating human intentions, the identified references utilize inference mechanisms in combination with probabilistic statistical models, such as dynamic temporal Bayesian networks (DBN), e.g. (Kwon and Hong Suh Citation2012; Schrempf et al. Citation2005; Hawkins et al. Citation2013), higher-order Markov Chains, e.g. (Zanchettin et al. Citation2019), or Gaussian mixture models (GMM), e.g. (H. Liu et al. Citation2019). For human motion tracking, the referenced approaches mostly utilize a depth-image camera (RGB-D camera), e.g. (Hawkins et al. Citation2013; H. Liu et al. Citation2019; Zanchettin et al. Citation2019; Cramer, Kellens, and Demeester Citation2021). This is consistent with the findings from (Arents et al. Citation2021), who identified the use of 3D cameras in almost 50% of their analyzed publications on HRC. As human motion prediction in HRC is not the focus of this paper, readers interested in this topic are referred to the reviews from (Rudenko et al. Citation2020; Mao et al. Citation2013) and the classification of movement prediction methods for HRC presented in (Galin and Meshcheryakov Citation2019).
As outlined above, the identified approaches within this sub-category – in contrast to the previous sub-categories – mainly focus on the methodologies for human movement prediction and the triggering of robot tasks, while the implications to task planning of collaborative assembly processes are only partially addressed. As a result, these approaches neither apply capability calculation criteria, nor suitability assessment methods, nor optimization algorithms. Therefore, the columns in the overview on the approaches in are widely changed, showing the motion tracking system, the intention prediction model, the inferred prediction variable, and the action selection method.
In general, the advantage of proactive task allocation approaches is a higher degree of human decision-making and flexibility in assembly execution, implying that the work can be performed in a less monotonous manner. However, this can come at the expense of lower process efficiency, higher unpredictability of cycle times, and a greater performance divergence among different workstations, depending on the human operator. Furthermore, as the robot could perform either unnecessary or incorrectly predicted actions based on presumed human intentions, the productive time of the robot is reduced. This results in a worse and more difficult to calculate return on investment for the robot. Moreover, if the prediction of the correct intention is determined too late to perform a supporting robot action in time, the human may have to wait, which in turn might also reduce the overall productivity.
4.1.2.4. Quantitative summary
Apart from the different utilized probabilistic prediction models discussed above, the included references also differ in terms of the feature which is predicted by the prediction model, as summarized in : The current human task is predicted by 50% (3/6) of included approaches, partly together with the remaining task duration (33%, 2/6). Further, there is one approach each that predicts the remaining human motion trajectory, anticipates the human’s next task based on the task model, or even predicts the complete assembly sequence that the human is most likely to follow. Accordingly, the methodologies for robot action selection and coordination differ with respect to the consideration of time as only such approaches that predict the remaining human task duration or anticipate future tasks can conduct a temporal scheduling, e.g. to minimize the overall waiting time (33%, 2/6) or the human waiting time (17%, 1/6).
4.2. Criteria for allocating assembly tasks (RQ2)
Based on the investigation and classification of the state of the art approaches for task allocation, the criteria that are utilized in the included references as a decision basis for allocating assembly tasks to humans or robots were analyzed. As the sub-category of proactive task allocation approaches does not apply an analytic assessment methodology for analyzing suitable task distribution and the included references do not provide information about applied criteria to initially decide about potential assistive tasks prior to online support anticipation, this sub-category is excluded from the criteria analysis.
From the included references, the utilized criteria were extracted and arranged into twelve criteria groups. shows the resulting detailed analysis of utilized criteria in each considered approach. In the following listing, these criteria are briefly described, and some exemplary specific parameters are given. For the quantitative calculation of the individual criteria, equations are presented in various publications; for those, the reader is referred to the references (Tsarouchi et al. Citation2017; Michalos et al. Citation2018; Malik and Bilberg Citation2019; Robotiq Citation2018; Evangelou et al. Citation2020).
4.2.1. Resource characteristics
The general properties and limitations of both resources (human and robot) are described by this criterion to derive and assess the basic eligibility for the execution of operations. For the robot, these properties usually result from the data sheet of the base system in conjunction with the specifications of the end-effector. Exemplary parameters are the maximum robot payload, respectively the maximum acceptable human load, reachability, speed, force exertion, equipped gripper type, gripping force, or precision (c.f. (Nikolakis et al. Citation2018; Michalos et al. Citation2018)). For human characteristics, an interesting idea has been proposed by (Johannsmeier and Haddadin Citation2017), who suggest the use of personal-specific, individualized parameters for the human worker in the form of a worker profile, using properties such as attention level, general experience level, or reliability that are mapped to a cost function or assigned as variables to the respective characteristics.
4.2.2. Part characteristics
The criterion of part characteristics comprises specific properties of the part to be assembled and the individual components required for it, which in turn place derivable requirements on the handling or joining of the objects. Exemplary parameters are the ability of parts and components to be grasped, which are affected by physical characteristics such as the components’ size and thickness, tolerances, weight, shape, stability, or sensitivity as described in more detail in (Malik and Bilberg Citation2019).
4.2.3. Assembly task and process requirements
The key requirements for executing an assembly task in HRC are derived from the assembly task itself. Thus, on the one hand, this criterion covers characteristics arising from the process design, the arrangement of the workstation, or the provision of materials. Subsequently, relevant parameters are, e.g. the task type (joining, handling, controlling, fitting, auxiliary operation), the type of part feeding, spatial conditions such as accessibility of the joining location, the mounting direction, the insertion resistance or required force, precision, the need for holding down after joining, or the type of fastening such as screwing, gluing, bending, and riveting (c.f. (Malik and Bilberg Citation2019)). On the other hand, the task precedence constraints of the overall process – as the fundamental information required for creating a suitable task schedule – are covered by this group of criteria.
4.2.4. Task time
In addition to the general capability, the execution time of an individual task through the eligible resources is an evident criterion for deciding whether humans or robots should execute a task – the resource that executes a task faster is an obvious candidate for the execution of the task. However, for a more profound task allocation, the consideration of the whole process is always decisive because in parallel branches a longer execution time of individual tasks does not necessarily imply a longer total time, but on the contrary, a parallelization is enabled by taking over tasks by the other resource. Nevertheless, the execution time of tasks can provide a good starting point for deciding on the reasonableness of a task assignment, especially regarding the economic efficiency as well as for time-critical processes.
4.2.5. Cycle time
The cycle time criterion describes the total time that is required for one execution of the entire assembly process and thus represents the more important criterion for the overall process compared to the task time. In contrast to the task time, this criterion cannot be examined in isolation, i.e. per process step, during the suitability assessment but must always be considered in the context of the overall assembly process. Accordingly, this criterion is especially taken into account by approaches that perform an optimization of the overall process in terms of an optimization goal or at least an aspect in the optimization. In addition to cycle time, the time spent on non-value-adding activities can also be taken into account, e.g. (Evangelou et al. Citation2020).
4.2.6. Ergonomics
The criterion of ergonomics takes into account the human during the assembly process and refers both to physiological ergonomics through ergonomic posture or avoidance of permanent strain, and to environmental conditions potentially causing health risks, e.g. through hazardous substances, dust, high temperatures or noise pollution. The approaches to task allocation examined in this review mostly consider aspects related to posture and physical strain. For instance, regarding the human body posture, parameters such as upper body inclination, lateral shoulder inclination, twisting of the upper body, arm and wrist tilting, or overhead work (c.f. (Petzoldt et al. Citation2020a)) could be analyzed. For this, also ergonomics assessment methods (see, e.g. (Lowe, Dempsey, and Jones Citation2019; Heidl, Boespflug, and Wakula Citation2018)) can be applied to quantify the ergonomic influence of individual process steps. The aspect of cognitive ergonomics and mental stress is addressed as part of the workload criterion described below.
4.2.7. Safety
As outlined in section 2, the safety aspect is crucial for HRC. Safety considerations can also be a decision factor when deciding on a task assignment. Here, for instance, the risk of injury or the probability of collisions as well as the required safety mode and sensor technologies are exemplary parameters to consider when deciding whether the execution of process steps is preferable by one of the resources.
4.2.8. Resource availability
The binary question of whether a resource is available at all for executing a task represents a basic prerequisite for assigning a task to a resource. For the initial process planning, this is partly implicitly considered by a task planner. However, the approaches considered here are those that explicitly check the availability of the resource, e.g. from the previous process step as part of the proposed decision logic for task allocation – either offline, e.g. (Malik and Bilberg Citation2019; Liau and Ryu Citation2020) or online, e.g. (Bruno and Antonelli Citation2018). Especially in dynamic task allocation approaches, this criterion is important as the non-availability of a resource mostly indicates a delay or a plan deviation, resulting in the need to initiate a plan adjustment or re-planning. Apart from the availability of the human or robot resources, the availability of a limited quantity of required tools has also been considered as an additional constraint for task allocation, e.g. in (Lee et al. Citation2022).
4.2.9. Cost or investment
Due to the high cost pressure in assembly, costs are always an important target criterion. The cost criterion can consider both ongoing costs during production and required investment costs. The latter is primarily assessed by static task allocation approaches either in terms of additionally required equipment such as camera systems, safety functions, or end effectors for the execution of tasks, e.g. (Beumelburg Citation2005), or in combination with the optimization of the arrangement, design and quantity structure at the workplace itself (Michalos et al. Citation2018). Ongoing costs are composed, e.g. of labor costs (salary per hour, with total worker hours required for the operations estimated, e.g. by MTM), costs for consumables, energy costs (energy consumption and peak power), and maintenance costs. Together, the total production costs calculated as the sum of the labor and purchase costs (Takata and Hirano Citation2011) can also be considered. When investigating assembly lines instead of single workstations, some approaches, e.g. (Nourmohammadi, Fathi, and Ng 2022; Gjeldum et al. Citation2021), also aim to reduce the required number of human operators for cost savings.
4.2.10. Process quality
High quality of the assembly process is a critical requirement. This can be assessed by the work quality or by the process reliability. First, for the quality of work, the error rate, reject or complaint rate can be used. In particular, the error rate can be recorded per process step and can directly be related to the assignment of tasks. For the task allocation to humans or robots, however, this is difficult to measure online during the assembly process, which is why it is usually limited to static task allocation approaches based on statistical analysis in advance. Second, the process reliability can be determined qualitatively on the basis of the process design and the resource characteristics, e.g. the robot allows a consistent quality even for monotonous tasks. Quantification can be achieved, for instance, by better-equal-worse scoring (Beumelburg Citation2005).
4.2.11. Workload or occupancy
This criterion summarizes several parameters that evaluate the workload and division of labor during the hybrid assembly process. The goal is not only to avoid unproductive time, especially for humans due to comparatively high labor costs, but also to positively affect different aspects of cognitive ergonomics, such as the avoidance of stress or psychological burden caused by the collaborative process execution. Exemplary parameters that are applied in the included references are the human waiting time (i.e. idle time), e.g. (Chen et al. Citation2014; Pupa and Secchi Citation2021), the human workload, e.g. (Johannsmeier and Haddadin Citation2017), the occupancy rate of the robot, e.g. (Michalos et al. Citation2018), or the balancing of the workload, e.g. (Faroni et al. Citation2020).
4.2.12. Movement length or space utilization
Finally, this criterion considers the necessary movement of the robot for executing a task. The background to the idea is that such tasks, in which the robot must either move over large distances or perform complex avoidance trajectories due to the simultaneous presence of the human, should rather be avoided. The reason for this is the resulting impact on time as well as energy costs. This criterion, i.e. the robot path length or movement distance, is only considered by simulation-based approaches. For the sake of completeness, the spatial requirements, i.e. the space utilization, should also be mentioned as a parameter. However, this parameter is exclusively considered by simulation-based approaches, which include the optimization of the workplace layout in addition to the task allocation.
shows the percentage of usage of the criteria groups in the studied approaches. This listing may provide both researchers and practitioners an initial indication of relevant criteria that are important in the allocation of assembly tasks in collaborative assembly scenarios. Resource characteristics (100%; 30/30) and process requirements (87%; 26/30) constitute the basic criteria being applied by almost all approaches, partly in conjunction with the assembly part characteristics (53%; 16/30). Furthermore, the time criterion is considered by nearly all approaches (70%, 21/30), either in terms of cycle time, mostly used by static task allocation approaches, or in terms of task time (30%, 10/30), especially applied by dynamic task allocation methods. Moreover, ergonomic aspects are also a relatively common criterion (47%, 14/30), which seems appropriate given the potential of HRC to relieve the physical strain on employees. The other criteria groups are less frequently considered.
Figure 8. Proportion of criteria applied for deciding about task allocation.
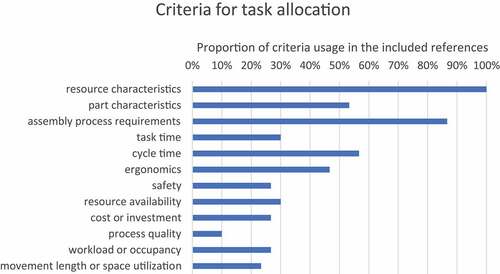
Here, it is important to emphasize that all approaches do not rely on a single criteria group but propose either a multi-criteria decision logic or a utility function for optimization, which combines various criteria. In both cases, a weighting of the individual criteria is significant to reach the company’s goals and exploit the potential of HRC. However, in the investigated approaches, both the weighting and the selection of the criteria themselves are rarely validated in practice or methodically determined through the analysis of standards or literature. Nevertheless, a few approaches, e.g. (Beumelburg Citation2005), do conduct expert interviews to prioritize the criteria.
In addition, it was observed that although dynamic task allocation approaches apply similar criteria to static approaches, they are often considered more superficially. Moreover, it is worth mentioning that most of these criteria are considered offline for initial plan generation and initial suitability decision, while only the aspects of availability, time, and to some extent, ergonomics are monitored online to detect and respond to delays or unexpected events.
5. Discussion
5.1. Reference model
Based on the reviewed literature and the detailed analysis of the individual task allocation approaches as well as the flowcharts presented in (Tsarouchi, Makris, and Chryssolouris Citation2016; Antonelli and Bruno Citation2019; Johannsmeier and Haddadin Citation2017; Michalos et al. Citation2018; Gjeldum et al. Citation2021), a reference model for task allocation in human-robot collaborative assembly was developed, which combines the proposed methodologies and procedures explained in section 4.1 into a common framework model. Within the model, the three sub-categories – static task allocation based on suitability assessment, simulation-supported static task allocation, and reactive and ad-hoc dynamic task allocation – are covered. Proactive task allocation approaches were not integrated due to their fundamentally different approach, as explained above. The developed reference model for task allocation in human-robot collaborative assembly is shown in . Depending on the intended type of task allocation, it consists of up to seven general process steps, namely:
Figure 9. Reference model for task allocation in human-robot collaborative assembly.

Input criteria provision, where the set of criteria (see section 4.2 and ) is collected or recorded, and an interface for accessing the required criteria for the task allocation approach is provided.
Suitability assessment, which assesses the basic capability of the resources for conducting each respective task based on process, product, and resource data, which is then encoded, e.g. as a capability score, a binary suitability, or an automation potential (c.f., section 4.1.1, ‘task allocation based on suitability assessment’; and column ‘suitability assessment approach’ in ).
Task allocation methodology, which first conducts the static task assignment based on both the capability assessment to identify non-variable and variable tasks, and additional criteria to rate the meaningfulness of an assignment in case of variable task assignments. Next, a static assembly process schedule is created by utilizing the input information (c.f., section 4.1.1; and keyword ‘allocation’ in the ‘task planning methodology’ column of ).
Process optimization, which aims to optimize the initial schedule by considering the additional criteria derived from the planning objectives as optimization goals of the optimization algorithm (c.f., section 4.1.1; and column ‘optimization of allocation assembly process’ in ).
Process evaluation in simulation, which can be used to validate the feasibility of a task allocation schedule, to compare and select from alternatives schedules, or to calculate process schedule evaluation parameters as an input to the process optimization algorithm from step 4 (c.f., section 4.1.1, ‘Simulation-supported, capability-based task allocation’; and column ‘purpose of simulation’ in ).
Process implementation and execution, where the created initial task allocation process schedule is finally implemented at the assembly system as well as executed by humans and robots using an execution control system. For static task allocation, the implementation of a fixed robot program is sufficient, while for dynamic task allocation, more flexible or hierarchical control architectures are required (for the latter, see section 4.1.1, ‘Reactive and ad-hoc task allocation approaches’; and section 5.3).
Execution monitoring and feedback loop, which observes the progress of the process by means of human feedback or tracking and robot state monitoring, and checks for plan deviations or failures to initiate a plan adaptation for dynamic reassignment of tasks (c.f., section 4.1.1, ‘Reactive and ad-hoc task allocation approaches’; and column ‘reactive plan adaptation approach’ in ).
The model is intended to help developers from both research and practice as a kind of blueprint to design a first system architecture for collaborative human-robot task allocation in assembly. As shown in , static task allocation approaches result in the creation of a static schedule (either manually created, optimized, or tested in simulation), i.e. these require performing steps 1–5 at most. This fixed schedule can then be deployed by a system integrator (step 6). Reactive, dynamic task allocation approaches are based on the generated initial process schedule, which is initially transferred to the process execution controller either manually or automatically, but extend the execution control with execution monitoring and rescheduling functions (steps 1–7). In contrast, dynamic ad-hoc approaches directly implement the overall task allocation logic in the real-time process execution control and therefore do not require an initial schedule, i.e. steps 1, 2, and 6–7, with an extension of step 6 by an online task allocation methodology.
5.2. Process implications and assembly scenarios
Within this review, a categorization of task allocation methods into static and dynamic approaches was proposed. Given the developed reference model, this classification seems reasonable, as the respective approaches address a different horizon of consideration and processing steps regarding the entire planning and implementation process, which is either limited to the period before process execution or includes it.
A detailed, qualitative comparison of the different approaches to task allocation that can be implemented with the proposed reference model is shown in . It presents the characteristics and effects of the different task allocation solutions in terms of the assembly process quality and flexibility as well as human factors, and provides an initial assessment of suitable assembly scenarios and implementation efforts based on the authors’ assessments.
Table 9. Qualitative comparison of the different approaches to task allocation and correlation with industrial assembly scenarios. A qualitative assessment of the listed characteristics is indicated by the following symbols: + (positive characteristic), ○ (neutral), and − (negative).
Regarding the potential industrial applications of both categories of task allocation approaches, static methods have the advantage of not requiring additional technology for the workplace except the robot and its controller with the allocation schedule implemented once for each process. In contrast, dynamic task allocation requires additional sensors for human tracking and powerful computing units for real-time processing methods as well as intuitive, active instructions on the tasks to be perfomed, e.g. by means of worker assistance systems with information projection onto the assembly worktop. In addition, dynamic approaches need to cope with different types of uncertainties (see section 5.3) and – in the case of a continuous monitoring of human activities – take into account data privacy aspects into account that might hamper industrialization.
Therefore, static task allocation approaches are preferable for processes with larger lot sizes and well-standardized processes in which only few plan deviations are to be expected (c.f. ). In such application scenarios, the high initial effort for approaches that perform process optimization or process validation in simulation is also justified. For static process schedules, manual verification and formal approval can also be conducted prior to implementation to address potentially required quality assurance processes. This is, for instance, relevant in highly standardized industry sectors such as the automobile industry.
However, with regard to less standardized assembly processes or processes with regular occurrence of delays, it is advantageous to have the possibility to react to outages and disturbances by dynamically changing the task distribution during execution instead of having a fixed, albeit initially optimized, schedule. Thus, dynamic task allocation approaches are preferable in such use cases. The decision between reactive and ad-hoc task allocation should be made primarily depending on the permissible variability between different assembly process executions and the desired adaptability to the individual worker (c.f. ).
5.3. Issues and approaches from the wider research field of human-robot interaction
The reviewed and analysed approaches to task allocation in HRC are closely related to research on combined task and motion planning (TAMP) from the wider field of human-robot interaction. Approaches to TAMP aim to combine task planning, i.e. the question of which task to perform, with motion planning, i.e. the calculation of how the motion to complete the task is to be performed (Mansouri, Pecora, and Schüller Citation2021). A key challenge to TAMP is that respective software tools operate on different representations (discrete and continuous), which makes it hard to link them (Waldhart, Gharbi, and Alami Citation2016). Therefore, many approaches to TAMP suggest hierarchical control architectures with higher-level task planning and lower-level motion planning (Waldhart, Gharbi, and Alami Citation2016). On the motion planning level, for instance, human-aware motion planning (Mainprice et al. Citation2011; Sisbot and Alami Citation2012) can be applied in human-robot interaction scenarios, which aims to improve HRC fluency, safety, and satisfaction (Lasota and Shah Citation2015) by choosing trajectories that minimize disturbances towards the human. For task planning, various methods, such as timeline-based task planning (Faroni et al. Citation2020) or hierarchical agent-based task planning (also referred to as human-aware task planning) (De Silva, Lallement, and Alami Citation2015; Waldhart, Gharbi, and Alami Citation2016; Lemaignan et al. Citation2017; Alami Citation2013; Fiore, Clodic, and Alami Citation2016), were suggested. A generic interface for combining both off-the-shelf task planners and motion planners was proposed by (Srivastava et al. Citation2014). Further, (Chongjie and Shah Citation2016) present an algorithm to optimize the high-level task planning based on information about the lower-level action and motion selection. For more details on TAMP, the reader is referred to recent review publications that explain current approaches and discuss applications, existing challenges, and limitations of TAMP (Mansouri, Pecora, and Schüller Citation2021; Garrett et al. Citation2021 K. Zhang et al. Citation2022).
Referring to the reviewed literature on task allocation for HRC in assembly, the analyzed approaches in this article mainly consider the aspect of task scheduling and allocation for HRC. However, a dedicated lower-level motion planning, as included in TAMP, is only considered in a few approaches, c.f. (Faroni et al. Citation2020; Pupa and Secchi Citation2021; Cesta, Orlandini, and Umbrico Citation2018). Instead, the trajectories to be executed per task are mostly predefined. The advantage of a dedicated lower-layer for motion planning is, however, that the collaboration dynamics and uncertainties, resulting from the coexistence of the robot and the human in the workspace (Mukherjee et al. Citation2022; Faroni et al. Citation2020), can be explicitly addressed. In general, human-robot collaboration needs to tackle different kinds of uncertainties (c.f., (Askarpour et al. Citation2019)):
temporal uncertainty, i.e. in response to variations in execution time.
behavioral uncertainty, including both, intrinsic and interactive uncertainty of human motion. While the intrinsic uncertainty of human motion does not depend on the robot’s state, the interactive uncertainty describes the uncertainty of human’s behavior in reaction to the robot.
goal uncertainty, describing human uncertainty to perform the required action or to follow the instructions correctly.
Temporal uncertainty is mostly related to task planning and scheduling and is already implicit in most approaches to dynamic task allocation. Future research could focus on incorporating the consideration of behavioral and goal uncertainty into task allocation solutions. Continuous monitoring of both the workplace and the human actions as well as active modeling of uncertainties could contribute to a better management of those uncertainties. In this context, various approaches might be integrated that either model human bevavior (Askarpour et al. Citation2019; Pöhler, Umlauft, and Hirche Citation2019), learn its policy (Nikolaidis et al. Citation2017; Pandya and Liu Citation2022), or predict human motions (Z. Liu et al. Citation2019) (see also the analyzed approaches to proactive task allocation). For camera-based human motion detection, (Sajedi et al. Citation2022) propose an approach to quantify the uncertainty of detection and suggest incorporating uncertainty more transparently in approaches to HRC, e.g. by providing warning signals in case of estimated high uncertainty. This would also contribute to better joint attention and action understanding, which are among the key elements in human-robot interaction (Clodic et al. Citation2017).
Nevertheless, for the practical implementation of task allocation solutions, a conscious decision should be made about the aspects of uncertainty that need to be considered for each application (Mansouri, Pecora, and Schüller Citation2021).
Therefore, on the one hand, the explicit consideration and management of those different kinds of uncertainties for task allocation, and, on the other hand, the combination of all aspects – task planning, scheduling, allocation, and (human-aware) motion planning (Mansouri, Pecora, and Schüller Citation2021) – into an integrated framework are promising research directions towards the design of advanced task allocation solutions with improved effectiveness and reliability.
In this context, an interesting work towards the integration of TAMP and HRC task allocation is proposed by (Pellegrinelli et al. Citation2017) for the task of (un-)loading a multi-fixturing system. The approach further considers temporal uncertainty by providing a set of trajectories for different human occupancy volumes of the workstation for each task, which constitute an interval for the respective robot execution time. The higher-level task scheduler considers this time interval during scheduling when a human task shall be executed in parallel. In addition, replanning is triggered in case of longer human task durations.
5.4. Challenges and research needs
In addition to the challenges discussed in the previous section 5.3, i.e. addressing uncertainty and exploiting the potentials arising by combining task planning, scheduling, allocation, and human-aware motion planning into an integrated framework, further research needs for task allocation in HRC were identified, which are outlined in the following:
When optimizing the task distribution based on a cost function using an optimization algorithm, different criteria have been combined into metrics as detailed in section 4.2. However, a profound quantification of capabilities and costs of ergonomic impacts for the worker is difficult, and its combination with well-quantifiable factors, such as cost or time, remains a major research challenge (Bänziger, Kunz, and Wegener Citation2018; Müller, Vette, and Mailahn Citation2016). According to (Ranz, Hummel, and Sihn Citation2017), approaches often tend to generalize the capabilities that humans and robots obtain. Especially for human operators, capabilities are in progressive change and depend on the worker-individual skillset, their age, as well as their actual constitution (Ranz, Hummel, and Sihn Citation2017). Dynamic task allocation approaches have the potential to account for this aspect by implicitly reacting to changes in human performance with adapted task distributions.
Similarly, as already stated in section 4.2, the weighting of individual criteria among each other should be further investigated. So far, literature is not concurring regarding the most suitable criteria to decide on a task allocation. Instead, the included references partly argue differently either for or against, for example, maximizing robot workload, conducting workload balancing, or minimizing human idle time. Here, systematic evaluation studies to investigate the effects and implications of different options and influencing variables constitute an open research question (see, e.g. (Faccio, Bottin, and Rosati Citation2019) for an investigation of the effects of varying degrees of collaboration, shares of tasks for human and robot, and product complexities for different assembly scenarios). Based on this, assembly scenario-dependent recommendations or methods to automatically adjust applied metrics in response to market demands could be derived.
Besides the applied criteria for task allocation itself, the authors see a need for well-standardized metrics and benchmarks for performance evaluation for HRC in general and specifically for comparing different task allocation approaches. As a starting point, the reader is referred to the overviews from (Marvel et al. Citation2020; Murphy and Debra Schreckenghost Citation2013).
Furthermore, the vast majority of the presented approaches in the analyzed references are evaluated in laboratory scenarios and are not yet mature technologies in operational industrial use. This finding is similar to the challenge identified by (Hentout et al. Citation2019), who state that a large gap exists between the conducted research and the deployment effort in real industrial environments to bring laboratory-based collaborative robot technologies into smart factories. Accordingly, the implementation of both static and dynamic task allocation approaches in practice and the investigation of the resulting implications remains a research need. Also, long-time studies should be conducted to investigate aspects of acceptance, productivity, and responsiveness to frequent variant or model changes.
Moreover, safety is a crucial aspect and an ongoing research challenge related to HRC (Arents et al. Citation2021). However, as shown in section 4.2, only a few approaches consider safety as an aspect for allocating tasks and seldomly address safety implications for implementation. Also, when implementing task allocation methods in practical applications, it is necessary to ensure that collaboration remains safe, especially during reactive task changes as well as under uncertainty (c.f. section 5.3). Hence, the certification of such applications also remains a future challenge.
Besides the technological part, worker acceptance is a key concern for enabling a successful implementation. A participatory design by involving workers in the implementation process as well as the inclusion of workers into parts of the decision-making process of task allocation could be essential factors for promoting acceptance (Schmidbauer et al. Citation2020; Tausch and Kluge Citation2020). The organization of the team either as equal partners or as a leader-assistant setup, as well as the way of assigning tasks based on either suggestions (human with decision-making authority) or commands (only system with decision-making authority), therefore needs to be explored in future work (c.f. (Fiore, Clodic, and Alami Citation2016)).
Finally, the authors see great potential in expanding current task allocation approaches with further assembly-related technologies. To improve practical usability, the connection of task allocation approaches and informational worker assistance systems that guide operative workers through the assembly process is an important component. Currently, such assembly assistance systems mainly focus on fully manual assembly processes (c.f. (Petzoldt et al. Citation2020b)). The representation of collaborative processes in such systems in conjunction with intelligent and dynamic task allocation methodologies would provide the operator with the necessary information about both the collaborative process and the precise work instructions in a familiar graphical environment. Thus, both physical and cognitive worker support could be addressed in a combined framework. Apart from the integration itself, the related research question is how and by what modality the human worker should be informed about the next task assigned or possible changes in the plan.
In addition, the integration of intuitive teaching methods to further automatize the entire process could be beneficial. For example, programming by demonstration methods for robot process implementation or teaching by demonstration methods to automatically capture the task sequence or even an initial task allocation schedule constitute a future research direction.
Finally, the motion prediction algorithms applied in the proactive task allocation approaches reviewed in this paper can also be utilized and exploited in more structured architectures, similar to that of the proposed reference model. For instance, rather than just reacting to disturbances, the system could anticipate potential disruptions to avoid delays by preemptively initiating supportive actions that prevent such delays before they occur.
6. Conclusion
This paper conducted a systematic literature review on task allocation for human-robot collaboration in assembly. Human-robot collaboration is attracting increasing interest in both research and practice, with the question of how to distribute processes most effectively posing a significant challenge to a successful breakthrough of collaborative assembly in industry. Nevertheless, while many related reviews examine the general topic of human-robot collaboration, focusing on aspects such as safety, robot programming, communication and interaction, human factors, or applications, only one review was found that explicitly focused on task planning and allocation. However, this review was published six years ago and was not conducted as a systematic literature review. Therefore, this paper intended to address this research gap by focusing on task allocation in assembly as the major application area of human-robot collaboration.
As part of this research, 521 publications resulting from the initial database search as well as the forward-backward search were analyzed, and 37 relevant references were identified that present methodologies for task allocation in human-robot collaborative assembly. Following the descriptive analysis, a content analysis was conducted to answer the two research questions by categorizing the included references into two superior categories of approaches, namely static and dynamic, and investigating them regarding their methodologies for suitability assessment, task distribution, schedule optimization, and online adaptation, as well as their respectively applied criteria as a basis for task allocation decisions. The results help to understand the current state of the art in human-robot task allocation in assembly and give detailed insights into the specific methodologies proposed in literature.
Furthermore, based on the insights gained from the literature analysis, a reference model for task allocation was developed that encompasses the various categories of approaches identified. This reference model could form a basis for further research on this topic. Finally, current challenges that need to be investigated to expedite the implementation of task allocation methods in practice were discussed, and future research needs related to application scenarios, metrics and benchmarks, implementation barriers, acceptance, and complementary technologies were outlined.
However, despite the methodological procedure used in this review through a systematic literature search combined with a forward-backward search, there are some limitations of this study that need to be addressed in future reviews. First, although the selection of both search terms and databases was based on thorough initial research and the authors’ knowledge of the field, the selection and composition of search terms could exclude some relevant references, for example, due to additional terms used synonymously. In addition, an extension of the conducted study to other fields than assembly would be interesting and could reveal further approaches to task allocation that could also be transferred to the assembly sector.
In closing, task allocation is an important component of collaborative assembly and, if implemented effectively, has the potential to contribute to a significant increase in the use of human-robot collaboration in industrial assembly by enhancing productivity and reducing operator workload.
Disclosure statement
No potential conflict of interest was reported by the authors.
References
- Alami, R. 2013. “On Human Models for Collaborative Robots.” In Proceedings of the 2013 International Conference on Collaboration Technologies and Systems, CTS 2013, 191–194. doi:10.1109/CTS.2013.6567228.
- Amir, N., M. Fathi, and A. H. C. Ng. 2022. “Balancing and Scheduling Assembly Lines with Human-Robot Collaboration Tasks.” Computers & Operations Research 140 (April): 105674. Elsevier Ltd. doi:10.1016/j.cor.2021.105674.
- Antonelli, D., S. Astanin, and G. Bruno. 2017. “Applicability of Human-Robot Collaboration to Small Batch Production.” In IFIP Advances in Information and Communication Technology, Vol. 480, 24–32. Torino, ItlayNew York LLC: Springer. doi:10.1007/978-3-319-45390-3_3.
- Antonelli, D., and G. Bruno. 2018. “Dynamic Task Sharing Strategy for Adaptive Human-Robot Collaborative Workcells.” In 24th International Conference on Production Research (ICPR 2017). doi:10.12783/dtetr/icpr2017/17672.
- Antonelli, D., and G. Bruno. 2019. “Dynamic Distribution of Assembly Tasks in a Collaborative Workcell of Humans and Robots.” FME Transactions 47 (4): 723–730. doi:10.5937/fmet1904723A.
- Arents, J., V. Abolins, J. Judvaitis, O. Vismanis, A. Oraby, and K. Ozols. 2021. “Human–Robot Collaboration Trends and Safety Aspects: A Systematic Review.” Journal of Sensor and Actuator Networks 10 (3): 48, MDPI AG: 48. doi:10.3390/jsan10030048.
- Askarpour, M., D. Mandrioli, M. Rossi, and F. Vicentini. 2019. “Formal Model of Human Erroneous Behavior for Safety Analysis in Collaborative Robotics.” Robotics and Computer-Integrated Manufacturing 57 (June): 465–476, Elsevier Ltd. doi:10.1016/j.rcim.2019.01.001.
- Baltrusch, S. J., F. Krause, A. W. de Vries, W. van Dijk, and M. P. de Looze. 2021. “What About the Human in Human Robot Collaboration? - a Literature Review on Hrc’s Effects on Aspects of Job Quality.” October in Ergonomics, 1–22. Taylor and Francis Ltd. doi:10.1080/00140139.2021.1984585.
- Bänziger, T., A. Kunz, and K. Wegener. 2018. “Optimizing Human–Robot Task Allocation Using a Simulation Tool Based on Standardized Work Descriptions.” In Journal of Intelligent Manufacturing, Vol. 31: 7. 1635–1648. Springer US. doi:10.1007/s10845-018-1411-1.
- Bauer, W., M. Bender, M. Braun, P. Rally, and O. Scholtz. 2016. “Lightweight Robots in Manual Assembly – Best to Start Simply! Examining Companies’ Initial Experiences with Lightweight Robots.” http://publica.fraunhofer.de/dokumente/N-415111.html.
- Beumelburg, K. 2005. Fähigkeitsorientierte Montageablaufplanung in Der Direkten Mensch-Roboter-Kooperation (Engl. Skill-Oriented Assembly Sequence Planning for the Direct Man-Robot-Cooperation). Heimsheim: Jost Jetter Verlag. doi:10.18419/opus-4037.
- Brocke, J. V., A. Simons, B. Niehaves, K. Riemer, R. Plattfaut, and A. Cleven. 2009. “Reconstructing the Giant: On the Importance of Rigour in Documenting the Literature Search Process.” In 17th European Conference on Information Systems, ECIS, Verona, 2206–2217.
- Bruno, G., and D. Antonelli. 2018. “Dynamic Task Classification and Assignment for the Management of Human-Robot Collaborative Teams in Workcells.” In The International Journal of Advanced Manufacturing Technology, Vol. 98, 9–12–27 2415–27. London: Springer. doi:10.1007/s00170-018-2400-4.
- Bughin, J., E. Hazan, S. Lund, P. Dahlström, A. Wiesinger, and A. Subramaniam. 2018. “Skill Shift: Automation and the Future of the Workforce.” McKinsey Global Institute, no. May. https://www.mckinsey.com/featured-insights/future-of-work/skill-shift-automation-and-the-future-of-the-workforce.
- Cesta, A., A. Orlandini, and A. Umbrico. 2018. “Fostering Robust Human-Robot Collaboration Through AI Task Planning.” Procedia CIRP, Vol. 72, 1045–1050. Elsevier B.V. doi:10.1016/j.procir.2018.03.022.
- Chen, F., K. Sekiyama, F. Cannella, and T. Fukuda. 2014. “Optimal Subtask Allocation for Human and Robot Collaboration Within Hybrid Assembly System.” IEEE Transactions on Automation Science and Engineering 11 (4). Institute of Electrical and Electronics Engineers Inc.: 1065–1075. doi:10.1109/TASE.2013.2274099.
- Chongjie, Z., and J. A. Shah. 2016. “Co-Optimizing Task and Motion Planning.” In IEEE International Conference on Intelligent Robots and Systems, 2016-Novem:4750–4756. Institute of Electrical and Electronics Engineers Inc. doi:10.1109/IROS.2016.7759698.
- Clodic, A., E. Pacherie, R. Alami, and R. Chatila. 2017. “Key Elements for Human-Robot Joint Action.” In Sociality and Normativity for Robots, 159–177. Springer International Publishing. doi:10.1007/978-3-319-53133-5_8.
- Colgate, J. E., W. Wannasuphoprasit, and M. A. Peshkin. 1996. “Cobots: Robots for Collaboration with Human Operators.” In American Society of Mechanical Engineers, Dynamic Systems and Control Division (Publication) DSC, 58:433–439. ASME. https://www.scopus.com/record/display.uri?eid=2-s2.0-0030402971&origin=inward&txGid=9b3c293976f5288a5f563e89247a86a5.
- Cooper, H. M. 1988. “Organizing Knowledge Syntheses: A Taxonomy of Literature Reviews.” Knowledge in Society: The International Journal of Knowledge Transfer 1 (1): 104–126. doi:10.1007/BF03177550.
- Cramer, M., K. Kellens, and E. Demeester. 2021. “Probabilistic Decision Model for Adaptive Task Planning in Human-Robot Collaborative Assembly Based on Designer and Operator Intents.” IEEE Robotics and Automation Letters 6 (4). Institute of Electrical and Electronics Engineers Inc.: 7325–7332. doi:10.1109/LRA.2021.3095513.
- Darvish, K., B. Bruno, E. Simetti, F. Mastrogiovanni, and G. Casalino. 2018. “Interleaved Online Task Planning, Simulation, Task Allocation and Motion Control for Flexible Human-Robot Cooperation.” RO-MAN 2018 - 27th IEEE International Symposium on Robot and Human Interactive Communication. IEEE, 58–65. doi:10.1109/ROMAN.2018.8525644.
- Dianatfar, M., J. Latokartano, and M. Lanz. 2020. “Review on Existing VR/AR Solutions in Human-Robot Collaboration.” Procedia CIRP, Vol. 97, 407–411. Elsevier B.V. doi:10.1016/j.procir.2020.05.259.
- DIN EN ISO 10218-1. 2011. Industrieroboter - Sicherheitsanforderungen - Teil 1: Roboter (DIN EN ISO 10218-1:2011). Vol. 25. 040.30. Berlin: Beuth Verlag GmbH.
- DIN EN ISO 10218-2. 2011. Industrieroboter - Sicherheitsanforderungen - Teil 2: Robotersysteme Und Integration (DIN EN ISO 10218-2:2011). Vol. 25. 040.30. Berlin: Beuth Verlag GmbH.
- ElMaraghy, H., G. Schuh, W. Elmaraghy, F. Piller, P. Schönsleben, M. Tseng, and A. Bernard. 2013. “Product Variety Management.” CIRP Annals - Manufacturing Technology 62 (2): 629–652. doi:10.1016/j.cirp.2013.05.007.
- Eloise, M., R. Minto, E. G. G. Zampieri, M. Faccio, and G. Rosati. 2019. “Human-Robot Collaboration in Manufacturing Applications: A Review.” In Robotics. (Vol. 8: 4). MDPI AG. doi:10.3390/robotics8040100.
- Ender, J. 2021. Design of Industrial Workplaces to Relieve Workers When Interacting with Joint-Arm-Robots. Edited by F B Guo, I Jenkinson, and R Larek. Liverpool John Moores University. doi:10.24377/LJMU.t.00014557.
- Evangelou, G., N. Dimitropoulos, G. Michalos, and S. Makris. 2020. “An Approach for Task and Action Planning in Human-Robot Collaborative Cells Using AI.” Procedia CIRP, Vol. 97, 476–481. Elsevier B.V. doi:10.1016/j.procir.2020.08.006.
- Faccio, M., M. Bottin, and G. Rosati. 2019. “Collaborative and Traditional Robotic Assembly: A Comparison Model” In International Journal of Advanced Manufacturing Technology. Vol. 102: 5–8. 1355–1372. London: Springer. doi:10.1007/s00170-018-03247-z.
- Faroni, M., M. Beschi, S. Ghidini, N. Pedrocchi, A. Umbrico, A. Orlandini, and A. Cesta. 2020. “A Layered Control Approach to Human-Aware Task and Motion Planning for Human-Robot Collaboration.” In 2020 29th IEEE International Conference on Robot and Human Interactive Communication (RO-MAN), Naples, 1204–1210.
- Fast-Berglund, Å., F. Palmkvist, P. Nyqvist, S. Ekered, and M. Åkerman. 2016. “Evaluating Cobots for Final Assembly.” Procedia CIRP, Vol. 44, 175–180. Elsevier B.V. doi:10.1016/j.procir.2016.02.114.
- Fiore, M., A. Clodic, and R. Alami. 2016. “On Planning and Task Achievement Modalities for Human-Robot Collaboration.” Springer Tracts in Advanced Robotics 109: 293–306. doi:10.1007/978-3-319-23778-7_20.
- Gaede, C., F. Ranz, V. Hummel, and W. Echelmeyer. 2018. “A Study on Challenges in the Implementation of Human-Robot Collaboration.” Journal of Engineering, Management and Operations 1: 29–39.
- Galin, R., and R. Meshcheryakov. 2019. Review on Human–Robot Interaction During Collaboration in a Shared Workspace. Lecture Notes in Computer Science (Including Subseries Lecture Notes in Artificial Intelligence and Lecture Notes in Bioinformatics), 11659 LNAI. 63–74. Springer Verlag. doi:10.1007/978-3-030-26118-4_7.
- Garrett, C. R., R. Chitnis, R. Holladay, B. Kim, T. Silver, L. Pack Kaelbling, and T. Lozano-Pérez. 2021. “Integrated Task and Motion Planning.” Annual Review of Control, Robotics, and Autonomous Systems 4 (1): 265–293. Annual Reviews Inc. doi:10.1146/annurev-control-091420-084139.
- Gerkey, B. P., and M. J. Matarić. 2004. “A Formal Analysis and Taxonomy of Task Allocation in Multi-Robot Systems.” In The International Journal of Robotics Research. Vol. 23: 9, 939–954. SAGE Publications. doi:10.1177/0278364904045564.
- Gjeldum, N., A. Aljinovic, M. Crnjac Zizic, and M. Mladineo. 2021. “Collaborative Robot Task Allocation on an Assembly Line Using the Decision Support System.” International Journal of Computer Integrated Manufacturing 35 (4–5): 510–526. doi:10.1080/0951192X.2021.1946856.
- Gualtieri, L., E. Rauch, and R. Vidoni. 2021. “Emerging Research Fields in Safety and Ergonomics in Industrial Collaborative Robotics: A Systematic Literature Review.” Robotics and Computer-Integrated Manufacturing 67 (May 2020): 101998, Elsevier Ltd: 101998. doi:10.1016/j.rcim.2020.101998.
- Gustavsson, P., M. Holm, A. Syberfeldt, and L. Wang. 2018. “Human-Robot Collaboration - Towards New Metrics for Selection of Communication Technologies.” Procedia CIRP, Vol. 72, 123–128. Elsevier B.V. doi:10.1016/j.procir.2018.03.156.
- Halme, R. J., M. Lanz, J. Kämäräinen, R. Pieters, J. Latokartano, and A. Hietanen. 2018. “Review of Vision-Based Safety Systems for Human-Robot Collaboration.” Procedia CIRP 72: 111–116. Elsevier B.V. doi:10.1016/j.procir.2018.03.043.
- Hancock, P. A., and S. F. Scallen. 1996. “The Future of Function Allocation - It’s Time to Rethink How Tasks are Allocated to People in Human-Machine Systems.” In Ergonomics in Design: The Quarterly of Human Factors Applications. Vol. 4: 4. 24–29. Human Factors an Ergonomics Society Inc. doi:10.1177/106480469600400406.
- Hawkins, K. P., V. Nam, S. Bansal, and A. F. Bobick. 2013. “Probabilistic Human Action Prediction and Wait-Sensitive Planning for Responsive Human-Robot Collaboration.” In 2013 13th IEEE-RAS International Conference on Humanoid Robots (Humanoids), October 15:499–506. IEEE. doi:10.1109/HUMANOIDS.2013.7030020.
- Heidl, M. J., A. Boespflug, and J. Wakula. 2018. “Evaluierung von Fünf Screening-Bewertungsverfahren Für Repetitive Physische Belastungen Anhand Des Subjektiven Belastungsempfindens Der Arbeitspersonen in Der Montage Der Automobil-Zulieferindustrie.” Zeitschrift Für Arbeitswissenschaft 72 (2): 120–129. doi:10.1007/s41449-018-0096-9.
- Hentout, A., M. Aouache, A. Maoudj, and I. Akli. 2019. “Human–Robot Interaction in Industrial Collaborative Robotics: A Literature Review of the Decade 2008–2017.” In Advanced Robotics. Vol. 33: 15–16. 764–799. Robotics Society of Japan. doi:10.1080/01691864.2019.1636714.
- Heydaryan, S., J. Suaza Bedolla, and G. Belingardi. 2018. “Safety Design and Development of a Human-Robot Collaboration Assembly Process in the Automotive Industry.” InApplied Sciences (Switzerland). Vol. 8: 3. MDPI AG. doi:10.3390/app8030344.
- Hinrichsen, S., D. Riediger, A. Unrau, S. Hinrichsen, D. Riediger, and A. Unrau. 2016. “Assistance Systems in Manuel Assembly.” In Production Engineering and Management. Proceedings 6th International Conference, Lemgo, 3–14.
- Hjorth, S., and D. Chrysostomou. 2022. “Human–Robot Collaboration in Industrial Environments: A Literature Review on Non-Destructive Disassembly.” Robotics and Computer-Integrated Manufacturing 73 (February): 102208, Elsevier BV: 102208. doi:10.1016/j.rcim.2021.102208.
- Inkulu, A. K., M. V. A. R. Bahubalendruni, A. Dara, and K. SankaranarayanaSamy. 2021. “Challenges and Opportunities in Human Robot Collaboration Context of Industry 4.0 - a State of the Art Review.” In Industrial Robot. Emerald Group Holdings Ltd. doi:10.1108/IR-04-2021-0077.
- ISO/TS 15066. 2016. Robots and Robotic Devices - Collaborative Robots (ISO/TS 15066:2016(E). Genf: ISO copyright office.
- Johannsmeier, L., and S. Haddadin. 2017. “A Hierarchical Human-Robot Interaction-Planning Framework for Task Allocation in Collaborative Industrial Assembly Processes.” IEEE Robotics and Automation Letters 2 (1): 41–48, IEEE. doi:10.1109/LRA.2016.2535907.
- Khamis, A., A. Hussein, and A. Elmogy. 2015. “Multi-Robot Task Allocation: A Review of the State-Of-The-Art.” In Studies in Computational Intelligence, 604. Springer Verlag. doi:10.1007/978-3-319-18299-5_2.
- Komenda, T., F. Ranz, and W. Sihn. 2019. “Influence of Task Allocation Patterns on Safety and Productivity in Human-Robot-Collaboration.” In Conference: Industrial Simulation Conference (ISC), Lissabon, 85–89.
- Kopp, T., A. Schäfer, and S. Kinkel. 2020. “Kollaborierende oder kollaborationsfähige Roboter? Welche Rolle spielt die Mensch-Roboter-Kollaboration in der Praxis?” Industrie 40 Management 2020 (2): 19–23. doi:10.30844/I40M_20-2_S19-2.
- Krüger, J., T. K. Lien, and A. Verl. 2009. “Cooperation of Human and Machines in Assembly Lines.” CIRP Annals - Manufacturing Technology 58 (2): 628–646, Elsevier. doi:10.1016/j.cirp.2009.09.009.
- Kumar, N., and D. Mahto. 2013. “Assembly Line Balancing: A Review of Developments and Trends in Approach to Industrial Application.” Global Journal of Research in Engineering 13 (2): 807–811.
- Kumar, S., C. Savur, and F. Sahin. 2021. “Survey of Human-Robot Collaboration in Industrial Settings: Awareness, Intelligence, and Compliance.” IEEE Transactions on Systems, Man, and Cybernetics: Systems. Institute of Electrical and Electronics Engineers Inc. doi:10.1109/TSMC.2020.3041231.
- Kwon, W. Y., and I. Hong Suh. 2012. “A Temporal Bayesian Network with Application to Design of a Proactive Robotic Assistant.” In Proceedings - IEEE International Conference on Robotics and Automation, 3685–3690. doi:10.1109/ICRA.2012.6224673.
- Lasota, P. A., and J. A. Shah. 2015. “Analyzing the Effects of Human-Aware Motion Planning on Close-Proximity Human-Robot Collaboration.” In Human Factors. Vol. 57: 1. 21–33. SAGE Publications Inc. doi:10.1177/0018720814565188.
- Lee, M. L., S. Behdad, X. Liang, and M. Zheng. 2022. “Task Allocation and Planning for Product Disassembly with Human–Robot Collaboration.” Robotics and Computer-Integrated Manufacturing 76 (August): 102306. Elsevier Ltd. doi:10.1016/j.rcim.2021.102306.
- Lemaignan, S., E. A. S. Mathieu Warnier, A. Clodic, and R. Alami. 2017. “Artificial Cognition for Social Human–Robot Interaction: An Implementation.” Artificial Intelligence 247 (June): 45–69. Elsevier B.V. doi:10.1016/j.artint.2016.07.002.
- Liau, Y. Y., and K. Ryu. 2020. “Task Allocation in Human-Robot Collaboration (HRC) Based on Task Characteristics and Agent Capability for Mold Assembly.” Procedia Manufacturing 51: 179–186. Elsevier B.V. doi:10.1016/j.promfg.2020.10.026.
- Liau, Y. Y., and K. Ryu. 2022. “Genetic Algorithm-Based Task Allocation in Multiple Modes of Human–Robot Collaboration Systems with Two Cobots.” In International Journal of Advanced Manufacturing Technology. Vol. 1: 11. 3. Springer Science and Business Media Deutschland GmbH. doi:10.1007/s00170-022-08670-x.
- Lihui, W., S. Keshavarzmanesh, H. Yung Feng, and R. O. Buchal. 2009. “Assembly Process Planning and Its Future in Collaborative Manufacturing: A Review.” In International Journal of Advanced Manufacturing Technology. Vol. 41: 1–2. 132–144. Springer. doi:10.1007/s00170-008-1458-9.
- Liu, H., Q. Daokui, X. Fang, F. Zou, J. Song, and K. Jia. 2019. “A Human-Robot Collaboration Framework Based on Human Motion Prediction and Task Model in Virtual Environment.” In 9th IEEE International Conference on Cyber Technology in Automation, Control and Intelligent Systems, CYBER 2019, 1044–1049. IEEE. doi:10.1109/CYBER46603.2019.9066603.
- Liu, Z., Q. Liu, X. Wenjun, Z. Liu, Z. Zhou, and J. Chen. 2019. “Deep Learning-Based Human Motion Prediction Considering Context Awareness for Human-Robot Collaboration in Manufacturing.” Procedia CIRP, Vol. 83, 272–278. Elsevier B.V. doi:10.1016/j.procir.2019.04.080.
- Lotter, B., and H.P.(. Wiendahl. 2012. Montage in Der Industriellen Produktion. 1. Auflage. Berlin, Heidelberg: Springer Berlin Heidelberg. doi:10.1007/978-3-642-29061-9.
- Lowe, B. D., P. G. Dempsey, and E. M. Jones. 2019. “Ergonomics Assessment Methods Used by Ergonomics Professionals.” Applied Ergonomics 81 (November): 102882, Elsevier Ltd: 102882. doi:10.1016/j.apergo.2019.102882.
- Mahadevan, K., M. Sousa, A. Tang, and T. Grossman. 2021. “Grip-That-There: An Investigation of Explicit and Implicit Task Allocation Techniques for Human-Robot Collaboration.” In Conference on Human Factors in Computing Systems - Proceedings, 1–14. New York, NY, USA: Association for Computing Machinery. doi:10.1145/3411764.3445355.
- Mainprice, J., E. A. Sisbot, L. Jaillet, J. Cortés, R. Alami, and T. Siméon. 2011. “Planning Human-Aware Motions Using a Sampling-Based Costmap Planner.” In Proceedings - IEEE International Conference on Robotics and Automation, 5012–5017. doi:10.1109/ICRA.2011.5980048.
- Makrini, I. E., K. Merckaert, J. De Winter, D. Lefeber, B. BramVanderborght, D. Lefeber, and B. Vanderborght. 2019. “Task Allocation for Improved Ergonomics in Human-Robot Collaborative Assembly.” In Interaction Studies. Social Behaviour and Communication in Biological and Artificial Systems Vol. 20, 102–133. John Benjamins Publishing Company. (1). doi:10.1075/is.18018.mak.
- Malik, A. A., and A. Bilberg. 2019. “Complexity-Based Task Allocation in Human-Robot Collaborative Assembly.” In Industrial Robot: The International Journal of Robotics Research and Application. Vol. 46: 4. 471–480. Emerald Group Publishing Ltd. doi:10.1108/IR-11-2018-0231.
- Mansouri, M., F. Pecora, and P. Schüller. 2021. “Combining Task and Motion Planning: Challenges and Guidelines.” In Frontiers in Robotics and AI Vol. 8, 133. Frontiers Media S.A. (May). doi:10.3389/frobt.2021.637888.
- Mao, Y., Q. Zhang, L. Wang, J. Zhu, R. Yang, and J. Gall. 2013. A Survey on Human Motion Analysis from Depth Data. Lecture Notes in Computer Science (Including Subseries Lecture Notes in Artificial Intelligence and Lecture Notes in Bioinformatics) 8200 LNCS Springer Verlag: 149–187. doi:10.1007/978-3-642-44964-2_8.
- Mark, B. G., E. Rauch, and D. T. Matt. 2021. “Worker Assistance Systems in Manufacturing: A Review of the State of the Art and Future Directions.” Journal of Manufacturing Systems 59 (April): 228–250. Elsevier B.V. doi:10.1016/j.jmsy.2021.02.017.
- Marvel, J. A., S. Bagchi, M. Zimmerman, and B. Antonishek. 2020. “Towards Effective Interface Designs for Collaborative HRI in Manufacturing: Metrics and Measures.” ACM Transactions on Human-Robot Interaction 9 (4): 1–55. Association for Computing Machinery. doi:10.1145/3385009.
- Marvel, J. A., J. Falco, and I. Marstio. 2015. “Characterizing Task-Based Human-Robot Collaboration Safety in Manufacturing.” IEEE Transactions on Systems, Man, and Cybernetics: Systems 45 (2). Institute of Electrical and Electronics Engineers Inc.: 260–275. doi:10.1109/TSMC.2014.2337275.
- Matthias, B., and H. Ding. 2015. “Die Zukunft Der Mensch-Roboter Kollaboration in Der Industriellen Montage.” In Internationales Forum Mechatronics (Ifm). Winterthur, Schweiz. https://www.researchgate.net/profile/Bjoern_Matthias/publication/269410966_Die_Zukunft_der_Mensch-Roboter_Kollaboration_in_der_industriellen_Montage/links/54f96ec80cf2ccffe9e113e4.pdf%5Cnhttp://www.researchgate.net/profile/Bjoern_Matthias/publication/2694.
- Maurtua, I., N. Pedrocchi, A. Orlandini, J. De Gea Fernandez, C. Vogel, A. Geenen, K. Althoefer, and A. Shafti. 2016. “FourBythree: Imagine Humans and Robots Working Hand in Hand.” In 2016 IEEE 21st International Conference on Emerging Technologies and Factory Automation (ETFA), 1–8. IEEE. doi:10.1109/ETFA.2016.7733583.
- Messeri, C., A. Bicchi, A. Maria Zanchettin, and P. Rocco. 2022. “A Dynamic Task Allocation Strategy to Mitigate the Human Physical Fatigue in Collaborative Robotics.” IEEE Robotics and Automation Letters 7 (2). Institute of Electrical and Electronics Engineers Inc.: 2178–2185. doi:10.1109/LRA.2022.3143520.
- Michalos, G., J. Spiliotopoulos, S. Makris, and G. Chryssolouris. 2018. “A Method for Planning Human Robot Shared Tasks.” CIRP Journal of Manufacturing Science and Technology 22 (August): 76–90, CIRP. doi:10.1016/j.cirpj.2018.05.003.
- Mukherjee, D., K. Gupta, L. Hsin Chang, and H. Najjaran. 2022. “A Survey of Robot Learning Strategies for Human-Robot Collaboration in Industrial Settings.” InRobotics and Computer-Integrated Manufacturing Vol. 73: 102231. Elsevier Ltd. doi:10.1016/j.rcim.2021.102231.
- Müller, R., M. Vette, and O. Mailahn. 2016. “Process-Oriented Task Assignment for Assembly Processes with Human-Robot Interaction.” Procedia CIRP, Vol. 44, 210–215. Elsevier B.V. doi:10.1016/j.procir.2016.02.080.
- Murphy, R. R., and Debra Schreckenghost. 2013. “Survey of Metrics for Human-Robot Interaction.” In ACM/IEEE International Conference on Human-Robot Interaction, 197–198. doi:10.1109/HRI.2013.6483569.
- Nelles, J., S. Th Kwee-Meier, and A. Mertens. 2019. “Evaluation Metrics Regarding Human Well-Being and System Performance in Human-Robot Interaction – a Literature Review.” Advances in Intelligent Systems and Computing, Vol. 825, 124–135. Springer Verlag. doi:10.1007/978-3-319-96068-5_14.
- Niermann, D., C. Petzoldt, T. Dörnbach, M. Isken, and M. Freitag. 2022. “Towards a Novel Software Framework for the Intuitive Generation of Process Flows for Multiple Robotic Systems.” In Procedia CIRP, Vol. 107, 137–142. Amsterdam, Netherlands: Elsevier. doi:10.1016/j.procir.2022.04.023.
- Nikolaidis, S., J. Forlizzi, D. Hsu, J. Shah, and S. Srinivasa. 2017. “Mathematical Models of Adaptation in Human-Robot Collaboration.” ArXiv, No Robotics July. (cs.RO). doi:10.48550/arXiv.1707.02586.
- Nikolakis, N., N. Kousi, G. Michalos, and S. Makris. 2018. “Dynamic Scheduling of Shared Human-Robot Manufacturing Operations.” Procedia CIRP, Vol. 72, 9–14. Elsevier B.V. doi:10.1016/j.procir.2018.04.007.
- Osterrieder, P., L. Budde, and T. Friedli. 2020. March“The Smart Factory as a Key Construct of Industry 4.0: A Systematic Literature Review” International Journal of Production Economics, Vol. 221: 107476. .Elsevier B.V. doi:10.1016/j.ijpe.2019.08.011.
- Pandya, R., and C. Liu. 2022. “Safe and Efficient Exploration of Human Models During Human-Robot Interaction”. ArXiv, No Robotics (Cs.Ro), no. August. doi:10.48550/arXiv.2208.01103.
- Peifer, Y., and M.A. Weber. 2020. “Vorgehensmodell Zur Integration Der Mensch-Roboter-Kollaboration.” In ZWF Zeitschrift Für Wirtschaftlichen Fabrikbetrieb, Vol. 115: 5. 279–282. Carl Hanser Verlag. doi:10.3139/104.112274.
- Pellegrinelli, S., A. Orlandini, N. Pedrocchi, A. Umbrico, and T. Tolio. 2017. “Motion Planning and Scheduling for Human and Industrial-Robot Collaboration.” In CIRP Annals - Manufacturing Technology Vol. 66, 1–4. Elsevier USA. (1). doi:10.1016/j.cirp.2017.04.095.
- Petzoldt, C., K. Dennis, B. Thies, and F. Michael. 2020a. “Functionalities and Implementation of Future Informational Assistance Systems for Manual Assembly.” In Subject-Oriented Business Process Management. The Digital Workplace – Nucleus of Transformation. Proc. of S-BPM ONE 2020, edited by M. Freitag, A. Kinra, H. Kotzab, H.-J. Kreowski, and K.-D. Thoben, 88–109. 1278. Cham: Springer. doi:10.1007/978-3-030-64351-5_7.
- Petzoldt, C., K. Dennis, B. Thies, and F. Michael 2020b. “Requirements for an Incentive-Based Assistance System for Manual Assembly.” In Dynamics in Logistics. Proceedings of the 7th International Conference on Dynamics in Logistics (LDIC 2020), edited by M. Freitag, H.-D. Haasis, H. Kotzab, and J. Pannek, 541–553. Springer, Cham. doi:10.1007/978-3-030-44783-0_50.
- Petzoldt, C., D. Keiser, H. Siesenis, T. Beinke, and M. Freitag. 2021. “Ermittlung Und Bewertung von Einsatzpotentialen Der Mensch-Roboter-Kollaboration - Methodisches Vorgehensmodell Für Die Industrielle Montage.” Zeitschrift Für Wirtschaftlichen Fabrikbetrieb, Vol. 116, 1–2–15 8–15. Walter de Gruyter GmbH. doi:10.1515/zwf-2021-0002.
- Petzoldt, C., L. Panter, D. Niermann, B. Vur, M. Freitag, T. Doernbach, M. Isken, and A. Sharma. 2021. “Intuitive Interaktionsschnittstelle Für Technische Logistiksysteme - Konfiguration Und Überwachung von Prozessabläufen Mittels Multimodaler Mensch-Technik-Interaktion Und Digitalem Zwilling.” Industrie 40 Management 37 (6): 42–46. GITO mbH Verlag. https://www.industrie40-management.de/view/I40-print
- Pöhler, L., J. Umlauft, and S. Hirche. 2019. “Uncertainty-Based Human Motion Tracking with Stable Gaussian Process State Space Models.” IFAC-Papersonline, Vol. 51, 8–14. Elsevier B.V. doi:10.1016/j.ifacol.2019.01.002.
- Pupa, A., and C. Secchi. 2021. “A Safety-Aware Architecture for Task Scheduling and Execution for Human-Robot Collaboration.” In IEEE International Conference on Intelligent Robots and Systems, 1895–1902. Institute of Electrical and Electronics Engineers Inc. doi:10.1109/IROS51168.2021.9636855.
- Qian, C., Y. Zhang, C. Jiang, S. Pan, and Y. Rong. 2020. “A Real-Time Data-Driven Collaborative Mechanism in Fixed-Position Assembly Systems for Smart Manufacturing.” Robotics and Computer-Integrated Manufacturing 61 (February): 101841, Elsevier Ltd. doi:10.1016/j.rcim.2019.101841.
- Rally, P., and O. Scholtz .2020. “Investitionsabschätzung Für MRK-Anwendungen.“ In Kompetenz Montage - Kollaborativ Und Wandlungsfähig - Projektatlas edited by Frank Hees et al., 216–217. Aachen: Lehrstuhl für Informationsmanagement im Maschinenbau. https://www.researchgate.net/publication/338698754_Investitionsabschatzung_fur_MRK-Anwendungen.
- Ranz, F., V. Hummel, and W. Sihn. 2017. “Capability-Based Task Allocation in Human-Robot Collaboration.” Procedia Manufacturing 9 (January): 182–189, Elsevier. doi:10.1016/j.promfg.2017.04.011.
- Rashid, M. F. F., W. Hutabarat, and A. Tiwari. 2012. “A Review on Assembly Sequence Planning and Assembly Line Balancing Optimisation Using Soft Computing Approaches.” In International Journal of Advanced Manufacturing Technology, Vol. 59: 1–4. 335–349. Springer. doi:10.1007/s00170-011-3499-8.
- Robla-Gomez, S., M. B. Victor, J. R. Llata, E. Gonzalez-Sarabia, C. Torre-Ferrero, and J. Perez-Oria. 2017. Working Together: A Review on Safe Human-Robot Collaboration in Industrial Environments. IEEE Access. Institute of Electrical and Electronics Engineers Inc. doi:10.1109/ACCESS.2017.2773127.
- Robotiq. 2018. “Top 5 KPIs EBook.” Top 5 Cobot Key Performance Indicators. https://blog.robotiq.com/top-five-kpis-for-cobots.
- Rowley, J., and F. Slack. 2004. “Conducting a Literature Review.” In Management Research News, Vol. 27: 6. 31–39. Emerald Group Publishing Limited. doi:10.1108/01409170410784185.
- Rudenko, A., L. Palmieri, M. Herman, K. M. Kitani, D. M. Gavrila, and K. O. Arras. 2020. “Human Motion Trajectory Prediction: A Survey.” In The International Journal of Robotics Research, Vol. 39: 8. 895–935. SAGE Publications Inc. doi:10.1177/0278364920917446.
- Sajedi, S., W. Liu, K. Eltouny, S. Behdad, M. Zheng, and X. Liang. 2022. “Uncertainty-Assisted Image-Processing for Human-Robot Close Collaboration.” IEEE Robotics and Automation Letters 7 (2). Institute of Electrical and Electronics Engineers Inc.: 4236–4243. doi:10.1109/LRA.2022.3150487.
- Schmidbauer, C., S. Schlund, T. B. Ionescu, and B. Hader. 2020. “Adaptive Task Sharing in Human-Robot Interaction in Assembly.” In IEEE International Conference on Industrial Engineering and Engineering Management (IEEM), 546–550. IEEE. doi:10.1109/IEEM45057.2020.9309971.
- Scholz-Reiter, B., and M. Freitag. 2007. “Autonomous Processes in Assembly Systems.” CIRP Annals 56 (2): 712–729, Elsevier. doi:10.1016/J.CIRP.2007.10.002.
- Schrempf, O. C., U. D. Hanebeck, A. J. Schmid, and H. Worn. 2005. “A Novel Approach to Proactive Human-Robot Cooperation.” In ROMAN 2005. IEEE International Workshop on Robot and Human Interactive Communication, 2005., 2005:555–560. IEEE. doi:10.1109/ROMAN.2005.1513838.
- Seenu, N., R. M. Kuppan Chetty, M. M. Ramya, and M. Nilakantan Janardhanan. 2020. “Review on State-Of-The-Art Dynamic Task Allocation Strategies for Multiple-Robot Systems.” In Industrial Robot. Emerald Group Holdings Ltd. doi:10.1108/IR-04-2020-0073.
- Silva, L., R. Lallement, and R. Alami. 2015. “The HATP Hierarchical Planner: Formalisation and an Initial Study of Its Usability and Practicality.” In IEEE International Conference on Intelligent Robots and Systems, 2015-Decem:6465–6472. Institute of Electrical and Electronics Engineers Inc. doi:10.1109/IROS.2015.7354301.
- Sipsas, K., N. Nikolakis, and S. Makris. 2021. “Dynamic Assembly Planning and Task Assignment.” In Advanced Human-Robot Collaboration in Manufacturing, 183–210. Springer International Publishing. doi:10.1007/978-3-030-69178-3_8.
- Sisbot, E. A., and R. Alami. 2012. “A Human-Aware Manipulation Planner.” IEEE Transactions on Robotics 28 (5): 1045–1057. doi:10.1109/TRO.2012.2196303.
- Soumen, G., and R. J. Gagnon. 1989. “A Comprehensive Literature Review and Analysis of the Design, Balancing and Scheduling of Assembly Systems.” In International Journal of Production Research. Vol. 27: 4. 637–670. Taylor & Francis Group. doi:10.1080/00207548908942574.
- Spena, P. R., P. Holzner, E. Rauch, R. Vidoni, and D. T. Matt. 2016. “Requirements for the Design of Flexible and Changeable Manufacturing and Assembly Systems: A SME-Survey.” Procedia CIRP, Vol. 41, 207–212. Elsevier B.V. doi:10.1016/j.procir.2016.01.018.
- Srivastava, S., E. Fang, L. Riano, R. Chitnis, S. Russell, and P. Abbeel. 2014. “Combined Task and Motion Planning Through an Extensible Planner-Independent Interface Layer.” In Proceedings - IEEE International Conference on Robotics and Automation, 639–646. Institute of Electrical and Electronics Engineers Inc. doi:10.1109/ICRA.2014.6906922.
- Steil, J. J., and G. W. Maier. 2020. “Kollaborative Roboter: Universale Werkzeuge in Der Digitalisierten Und Vernetzten Arbeitswelt.” In Handbuch Gestaltung Digitaler Und Vernetzter Arbeitswelten, 323–346. Berlin Heidelberg: Springer. doi:10.1007/978-3-662-52979-9_15.
- Takata, S., and T. Hirano. 2011. “Human and Robot Allocation Method for Hybrid Assembly Systems.” CIRP Annals - Manufacturing Technology 60 (1): 9–12, Elsevier. doi:10.1016/j.cirp.2011.03.128.
- Tan, J. T. C., F. Duan, Y. Zhang, K. Watanabe, R. Kato, and T. Arai. 2009. “Human-Robot Collaboration in Cellular Manufacturing: Design and Development.” In 2009 IEEE/RSJ International Conference on Intelligent Robots and Systems, IROS 2009, 29–34. doi:10.1109/IROS.2009.5354155.
- Tausch, A., and A. Kluge. 2020. “The Best Task Allocation Process is to Decide on One’s Own: Effects of the Allocation Agent in Human–Robot Interaction on Perceived Work Characteristics and Satisfaction.” In Cognition, Technology and Work, Vol. 1: December. 3. Springer Science and Business Media Deutschland GmbH. doi:10.1007/s10111-020-00656-7.
- Tsarouchi, P., S. Makris, and G. Chryssolouris. 2016. “Human-Robot Interaction Review and Challenges on Task Planning and Programming.” In International Journal of Computer Integrated Manufacturing, Vol. 29: 8. 916–931. Taylor & Francis. doi:10.1080/0951192X.2015.1130251.
- Tsarouchi, P., G. Michalos, S. Makris, T. Athanasatos, K. Dimoulas, and G. Chryssolouris. 2017. “On a Human–Robot Workplace Design and Task Allocation System.” In International Journal of Computer Integrated Manufacturing, Vol. 30: 12. 1272–1279. Taylor & Francis. doi:10.1080/0951192X.2017.1307524.
- Tsarouchi, P., A.S. Stereos Matthaiakis, S. Makris, and G. Chryssolouris. 2016. “On a Human-Robot Collaboration in an Assembly Cell.” In International Journal of Computer Integrated Manufacturing, Vol. 30: 6. 580–589. Taylor and Francis Ltd. doi:10.1080/0951192X.2016.1187297.
- Valk, H. V. D., H. Haße, F. Möller, M. Arbter, J.L. Henning, and B. Otto. 2020. “A Taxonomy of Digital Twins.” In 26th Americas Conference on Information Systems (AMCIS). Salt Lake City, USA. https://www.researchgate.net/publication/341235159_A_Taxonomy_of_Digital_Twins.
- Villani, V., F. Pini, F. Leali, and C. Secchi. 2018. “Survey on Human–Robot Collaboration in Industrial Settings: Safety, Intuitive Interfaces and Applications.” Mechatronics 55 (March): 248–266, Pergamon. doi:10.1016/j.mechatronics.2018.02.009.
- Villani, V., F. Pini, F. Leali, C. Secchi, and C. Fantuzzi. 2018. “Survey on Human-Robot Interaction for Robot Programming in Industrial Applications.” InIFAC-Papersonline Vol. 51: 11. IFAC Secretariat. doi:10.1016/j.ifacol.2018.08.236.
- Waldhart, J., M. Gharbi, and R. Alami. 2016. “A Novel Software Combining Task and Motion Planning for Human-Robot Interaction Geometric Reasoning and Planning.” In 2016 AAAI Fall Symposium Series. https://youtu.be/2iBElhKi-AE.
- Wang, L., R. Gao, J. Váncza, J. Krüger, X. V. V. Wang, S. Makris, and G. Chryssolouris. 2019. “Symbiotic Human-Robot Collaborative Assembly.” In CIRP Annals Vol. 68, 701–726. Elsevier USA. (2). doi:10.1016/j.cirp.2019.05.002.
- Wang, L., S. Liu, H. Liu, and X. V. Wang. 2020. “Overview of Human-Robot Collaboration in Manufacturing.” In Lecture Notes in Mechanical Engineering, 15–58. Springer. doi:10.1007/978-3-030-46212-3_2.
- Webster, J., and R. T. Watson. 2002. “Analyzing the Past to Prepare for the Future: Writing a Literature Review.” In MIS QuarterlyVol. 26:2. Management Information Systems Research Center, University of Minnesota xiii–xxiii. doi:10.1080/12460125.2020.1798591
- Wiese, E., P. P. Weis, Y. Bigman, K. Kapsaskis, and K. Gray. 2022. “It’s a Match: Task Assignment in Human–Robot Collaboration Depends on Mind Perception” In International Journal of Social Robotics, Vol. 14: 1. 141–148. Media B.V. Springer Science and Business. doi:10.1007/s12369-021-00771-z.
- Xuan, W., V. Goepp, and A. Siadat. 2020. “Concept and Engineering Development of Cyber Physical Production Systems: A Systematic Literature Review.” In International Journal of Advanced Manufacturing Technology, Vol. 111: 1–2. 243–261. Springer Science and Business Media Deutschland GmbH. doi:10.1007/s00170-020-06110-2.
- Yuan, S., Z. Gao, M. Dong, L. Liu, X. Tao, K. Guo, and W. Fang. 2021. “Evaluation of Human-Robot Collaborative Assembly Task Allocation Plan.” Lecture Notes in Electrical Engineering, Vol. 737, 487–495. Springer Science and Business Media Deutschland GmbH. doi:10.1007/978-981-33-6318-2_61.
- Zacharaki, A., I. Kostavelis, A. Gasteratos, and I. Dokas. 2020.“Safety Bounds in Human Robot Interaction: A Survey.” In Safety Science, Vol. 127. July. Elsevier B.V. doi:10.1016/j.ssci.2020.104667.
- Zanchettin, A. M., A. Casalino, L. Piroddi, and P. Rocco. 2019. “Prediction of Human Activity Patterns for Human-Robot Collaborative Assembly Tasks.” IEEE Transactions on Industrial Informatics 15 (7): 3934–3942. IEEE. doi:10.1109/TII.2018.2882741.
- Zhang, K., E. Lucet, J. Sandretto, S. Kchir, and D. Filliat. 2022. “Task and Motion Planning Methods: Applications and Limitations.” In Proceedings of the 19th International Conference on Informatics in Control, Automation and Robotics, 476–483. Scitepress. doi:10.5220/0011314000003271.
- Zoltan, D., and K. S. Dhir. 2020. “Technology Jump in the Industry: Human–Robot Cooperation in Production.” In Industrial Robot, Vol. 47: 5. 757–775. Emerald Group Holdings Ltd. doi:10.1108/IR-02-2020-0039.