
Abstract
Autonomous Vehicles (AV) hold a significant promise in creating a positive disruption of transportation. However, the majority of people perceive AV with fear, anxiety and public resistance. Our study aims to examine how controllability mediates the relationships between main personality traits (sensation seeking and big five), and AV acceptance. In a cross-sectional study, we found that low desirability of control and high external driving locus of control are associated with high AV acceptance. Moreover. We found that individuals high in sensation seeking, perceive high external driving locus of control, and low desirability to control, which in turn leads to low AV acceptance. In addition, the desirability of control and external driving locus mediated the relationships between extraversion, conscientiousness and neuroticism with AV acceptance. Overall, our results support the hypothesized model and suggest that for people to trust AV they need to have some sense of controlling the vehicle.
1. Introduction
The most significant and innovative technology revolutions in the transportation industry, is probably the Autonomous Vehicles (AVs), which are generally referred to self-driving robotic vehicles that work without a human operator (Kaur & Rampersad, Citation2018). The continuum of automation includes five to six levels from no automation to diverse levels of partial automation to full automation (e.g., Johnson & Joshi, Citation2018). Higher levels of automation are expressed in more frequent and complex driving behaviors that are performed by the vehicle’s computer and sensors in an autonomous fashion. The potential for autonomous vehicles to revolutionize the automotive industry is contingent on two primary factors. The first is that human error has been demonstrated repeatedly as the primary cause of most traffic accidents (Klauer et al., Citation2014; Smolensky et al., Citation2011). By mitigating, or even eliminating the need for human drivers, AVs address the safety concerns associated with human errors, thereby enhancing overall driving safety. Secondly, in a world where people can be mere passengers in their vehicles, driving will be replaced by a range of leisure activities, such as reading, resting, communicating, or working, for the majority of the journey (Krueger et al., Citation2016). Hence, the rapidly advanced AV technology is expected to disrupt current mobility and transportation systems, and fundamentally alters people’s lifestyle (Shabanpour et al., Citation2018).
Despite the promising advancements in autonomous vehicle technology that have the potential to enhance safety and comfort, studies indicate that the majority of people view AVs as less safe, resulting in widespread fear, anxiety, and public resistance towards their adoption (e.g. Kaur & Rampersad, Citation2018; Rice et al., Citation2021). AVs are perceived with high vulnerability to car hacking, remote access, remote control of the vehicle, and computer viruses (Kaur & Rampersad, Citation2018; Schoettle & Sivak, Citation2014). In addition, the fear of giving up control to a machine that potentially could put you at risk for injury or even death is a major psychological barrier of public acceptance of AVs (Hong et al., Citation2021; Tussyadiah et al., Citation2017).
Hence, this study aims to extend previous research on psychological determinants of AV acceptance, focusing on controllability as a personality trait. Moreover, in line with previous studies that examined the associations between personality traits and technology acceptance in general (Amichai-Hamburger & Vinitzky, Citation2010; Svendsen et al., Citation2013), and specifically with AV acceptance (e.g. Hegner et al., Citation2019; Kaye et al., Citation2021), we propose and test an integrative model that predicts AV acceptance by personality traits with the mediation of the desirability of control and locus of control.
2. Theoretical background
2.1. The acceptance of AVs
While novel technologies often offer more efficient and comfortable solutions to personal and social challenges, they may also entail certain risks. Therefore, user acceptance has become a crucial psychological factor concerning the adoption of new technologies (Vlassenroot et al., Citation2010). Acceptance refers to the attitude towards, and the intention to use new technology. The psychological roots of studying acceptance rely on the Theory of Planned Behavior and Theory of Reasoned Action (Ajzen & Fishbein, Citation1975). These theories stipulate that an individual’s behavior is determined by their intention to engage in that behavior. While, the original theory of Reasoned Action included four constructs (beliefs, attitudes, intentions, and behaviors), the Theory of Planned Behavior, added one additional construct of perceived behavioral control, which is defined as the perceived ability to control one’s specific behaviors. Another well-established theoretical framework to understand user acceptance is the Technology Acceptance Model (TAM; Davis, Citation1989), which utilize a range of variables to predict intentions to use and actual use of technological systems. Davis (Citation1989) proposed that perceived usefulness (PU) and perceived ease of use (PEOU) are the two main factors that determine the most, how likely for a new technology to be adopted. By the integration of these models, previous studies demonstrated the rational aspects of the adoption of AVs (Acheampong & Cugurullo, Citation2019; Herrenkind et al., Citation2019; Zhang et al., Citation2019).
To expand the understanding of AV acceptance, others have emphasized the role of psychosocial factors such as subjective norms and social influence to predict intentions to use AVs (Kaye et al., Citation2020; Yuen et al., Citation2020). A systematic review that examined determinants of AV acceptance demonstrated the importance of six main factors that affect AV acceptance, namely safety, performance-to-price value, mobility, value of travel time, symbolic value, and environmentally friendly (Jing et al., Citation2020). In a similar vein, a recent meta-analysis performed on 35 articles that assessed users’ acceptance of AVs, revealed that perceived behavioral control, perceived benefits/usefulness, perceived ease of use, and subjective/social norms had significant positive pooled relationships with the intention to use AVs (Kaye et al., Citation2021).
2.2. Personality traits and AV acceptance
A large body of literature showed that personal characteristics and personality traits shape the way people perceive both the promises and the fears of novel technology (Amichai-Hamburger et al., Citation2007; Amichai-Hamburger & Vinitzky, Citation2010; Blut et al., Citation2016; Hegner et al., Citation2019; Qu et al., Citation2021). As proposed by Hamburger et al. (Citation2022), desirability of control, locus of control, sensation seeking and big-five traits, largely interact with decision making processes and subjective experience of driving an AVs. In the following section we elaborate how these traits affect the perception of AV, in the sense of mitigating or increasing the willingness to drive AVs.
2.2.1. Desirability of control
The human drive to control and predict at least some aspects of one’s environment is a significant motivating factor in behavior (Gefen & Straub, Citation2004). However, when using an autonomous car, drivers relinquishes control and must trust the AV to transport them safely to their destination. The higher level of automation, the less control the human driver perceives (Rödel et al., Citation2014), raising concerns about entrusting control to a machine rather than a person. Nevertheless, individuals vary in their preference for control (Burger & Cooper, Citation1979).
Individuals with a high need for control typically exhibit traits such as assertiveness, decisiveness, and proactivity. They prefer to make decisions themselves and may even attempt to manipulate situations to achieve a desired outcome. In contrast, individuals with a low need for control tend to prefer when decisions, even those that directly impact them, are made by others on their behalf (Nees et al., Citation2021). In line with previous studies that emphasize the desirability of control as a central motivation in driving (Gardner & Abraham, Citation2007; Syahrivar et al., Citation2021), we hypothesize that:
H1:
High desirability of control is negatively associated with acceptance in an AV.
2.2.2. Locus of control
Internal locus of control (LOC) is defined as the extent that an individual believes that they control the important events in their life. This compares with the feeling that one is under the control of external circumstances, which relates to external LOC (April et al., Citation2012). Studies have shown that individuals with an external locus of control tend to place a greater emphasis on the perceived benefits of technology, such as improved safety and convenience, rather than on the potential risks and uncertainties associated with new technologies. This may make them more willing to embrace the use of autonomous vehicles, even in their early stages of development and deployment (Payre et al., Citation2014). Additionally, individuals with an external locus of control may be more comfortable relinquishing control to a machine or technology, as they may feel less responsible for the outcome of their actions.
Individuals with a high external locus of control often attribute accidents to human error and see automated driving systems as a way to mitigate driving risks. They may assume a passive role with the automated system due to their higher level of trust in comparison to those with an internal locus of control (Choi & Ji, Citation2015). However, studies have also found a positive correlation between external locus of control and overconfidence while driving (Payre et al., Citation2014) and a slower response to intervene in cruise control systems when they appear to malfunction (Rudin-Brown & Parker, Citation2004). These results may be due to external individuals’ beliefs that driving events are beyond their control, making it easier for them to rely on automated vehicles and less on their own driving skills compared to those with an internal locus of control. Nevertheless, individuals who strongly believe in their ability to make independent decisions and effectively influence their environment are less likely to trust external automated systems. In a recent study, Syahrivar et al. (Citation2021) examined the relationship between personal control and automation and showed that desire for control and external locus of control of drivers are positively correlated with positive attitudes toward AV. Following this rational, we hypothesize that:
H2a:
External LOC is positively associated with AV acceptance.
H2b:
Internal LOC is negatively associated with AV acceptance.
2.2.3. Sensation seeking
Sensation seeking is the tendency to continuously seek novel, varied, and intense sensations, embrace change and even to engage in risks for the sake of such experiences (Payre et al., Citation2014; Zuckerman, Citation1994). Individuals high in sensation seeking tend to be involved in risky behaviors such as gambling, smoking, and risky driving, including speeding and driving while intoxicated (Armstrong et al., Citation2020). However, people who are low in this trait often seek familiarity, continuity and embrace steadiness.
Sensation seeking is commonly divided into four dimensions: (1) Thrill and Adventure Seeking (TAS) dimension, which includes physical activities that range from mild to heavily risky; (2) Experience Seeking (SE) dimension, which mainly focuses on novel stimuli (e.g. unfamiliar foods and places); (3) Disinhibition (Dis) dimension describes the need of finding excitement through others in the form of wild parties, drinking and sexual promiscuity; (4) Boredom Susceptibility (BS) which refers to an aversion to any kind of monotony and to people who are perceived as unexciting by the person (Zuckerman, Citation2007).
Previous studies showed that individuals high in sensation seeking demonstrate lower intention to use AV since driving AV is perceived with lower enjoyment and excitement (Kyriakidis et al., Citation2015; Rödel et al., Citation2014). Higher level of automation leads to larger psychological distance between driver and car, and therefore it removes an important ingredient of the pleasure users derive from driving (Eckoldt et al., Citation2012; Johansson et al., Citation2021). Following these findings, we hypothesize that:
H3:
The negative association between sensation seeking and AV acceptance is mediated by high external LOC, low internal LOC and low desirability of control.
2.2.4. The big five
The five-factor model is one of the most commonly used personality models, measuring extraversion, agreeableness, openness to experiences, conscientiousness and neuroticism. Individuals with high openness to experiences tend to be openminded, investigative and enjoy novel experiences (Roccas et al., Citation2002). On the other hand, individuals with low openness to experiences, are down to earth and tend to be more conservative, that is, they like things to stay the way they are (Roccas et al., Citation2002). Extraversion is defined as level of talkativeness, gregariousness and sociability (Barrick & Mount, Citation1991). Individuals high in extraversion are less easily aroused compared to introverts and thus need external stimulation in order to reach their optimal level of arousal. People low in extraversion, on the other hand, are naturally more stimulated and thus prefer a quieter life with less external stimulation (Hills & Argyle, Citation2001).
Agreeableness is concerned with the extent to which people are modest, nice and cooperative or, on the other end, strive for power, are irritable and unconscionable (Roccas et al., Citation2002). People who score high on the conscientiousness dimension are responsible, dependable, organized, planful, able to inhibit impulses well and are usually hard-working (Barrick & Mount, Citation1991; Roccas et al., Citation2002). Neuroticism is associated with a low tolerance for stress and aversive stimuli, and is related to emotional stability. Individuals who score high on this trait are often anxious, worry frequently, experience negative emotions, and may struggle with depression and insecurity (Roccas et al., Citation2002). Studies that have explored the connection between the big five personality traits and technology adoption have found that openness, agreeableness, and extraversion are positively correlated with the acceptance of self-driving vehicles and other novel technologies, whereas neuroticism has a negative impact on trust in automation (Özbek et al., Citation2014; Qu et al., Citation2021; Skippon et al., Citation2016). Moreover. The importance of big five to driving behaviors was also demonstrated. For example, in a recent meta analysis, Luo et al. (Citation2023) found that risky and aggressive driving behaviors were negatively associated with conscientiousness, agreeableness, and openness, but positively associated with neuroticism.
Following these findings, we hypothesize that:
H4:
The positive association between extraversion and AV acceptance is mediated by high external LOC, low internal LOC and low desirability of control.
H5:
The positive association between agreeableness and AV acceptance is mediated by high external LOC, low internal LOC and low desirability of control.
H6:
The positive association between conscientiousness and AV acceptance is mediated by high external LOC, low internal LOC and low desirability of control.
H7:
The positive association between openness to experience and AV acceptance is mediated by high external LOC, low internal LOC and low desirability of control.
H8:
The negative association between neuroticism and AV acceptance is mediated by low external LOC, high internal LOC and high desirability of control.
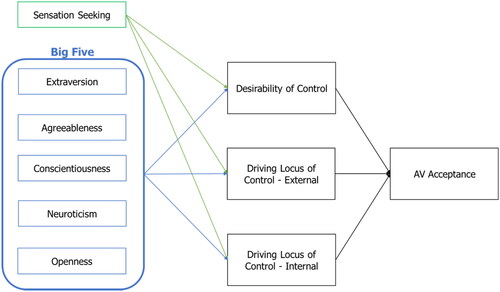
presents the full hypothesized study model.
Figure 1. Path analysis model for the relations between sensation seeking, big-five traits and AV acceptance, mediated by desirability of control and driving locus of control.
3. Method
3.1. Participants
The sample of this study consisted of 447 participants (see ). About half of the sample (55.8%) were females, whilst age of total sample ranged between 19 and 60 (M = 36.61, SD = 11.33). 49% of the sample were married, 40.3% were single, and the rest were divorced (5.8%) or widowed (5%). All of the participants had a driving license for 16.43 years in average (SD = 10.77). As for driving pattern, most of participants (74.3%) reported on driving on a daily basis, 13.1% of the sample stated they drive up to three times a week, 4.1% of the sample reported they drive up to three times a month, and 8.6% reported on driving once in several months. Only 8% of the sample reported they had personally experienced a car-accident.
Table 1. Socio-demographic characteristics of the sample
3.2. Measures
3.2.1. Trust and acceptance of autonomous vehicle
We used the Self- driving Car Acceptance Scale (SCAC) to assess the level of the AV acceptance (Nees, Citation2016).
In this study we asked participants to refer a level-5 autonomous vehicle, that is a completely self driving car. The 24-item scale was rated on a Likert-scale between 1 (Absolutely not agree) and 7 (Absolutely agree). SCAC evaluated eight factors (consisted of three items each) of the AV acceptance: (1) Trust (e.g. “Self-driving cars will be safe,” α = 0.70), (2) Cost-effectiveness (e.g. “The benefits of a self-driving car would outweigh the amount of money it would cost,” α = 0.72), (3) Compatibility (e.g. “I think that computers should be driving cars,” α = 0.60), (4) Enjoyment of driving (e.g. “I enjoy driving a car,” reversed item, α = 0.78), (5) Perceived usefulness (e.g. “A self-driving car would allow me to be more productive,” α = 0.80), (6) Perceived ease of use (e.g. “Self-driving cars will be easy to use,” α = 0.75). (7) Positive experience (e.g. “I like to use technology to make tasks easier for me,” α = 0.65), (8) Intention to use (e.g., “I would like to own a self-driving car,” α = 0.62). In the current study, the total scale had a high internal reliability (α = 0.90).
3.2.2. Desirability of control
To assess the personality tendency of individuals to control over their environment, we used the Desirability of Control Scale (Burger & Cooper, Citation1979). The scale consisted of 20 items (e.g. “I prefer a job where I have a lot of control over what I do and when I do it”) that were rated on a Likert-scale between 1 (Absolutely not agree) and 7 (Absolutely agree). This scale was found to be valid instrument to assess desire for control and its subdimensions (Gebhardt & Brosschot, Citation2002). In the current study, the total scale had a high internal reliability (α = 0.85).
3.2.3. Driving internal and external locus of control
To assess driving locus of control, we used the Driving Internality (DI) and Driving Externality (DE) Scale (Montag & Comrey, Citation1987). The 30-item scale was rated on a Likert-scale between 1 (Absolutely not agree) and 7 (Absolutely agree), and evaluated two factors: (1) Driving Internality, that is internal driving locus of control (e.g. “The careful driver can prevent any accident”), α = 0.87. (2) Driving Externality, that is external driving locus of control (e.g. “Driving with no accidents is mainly a matter of luck”), α = 0.78.
3.2.4. Big-five personality traits
To assess the big-five personality traits, we used the Big Five Inventory (BFI)-10 (Rammstedt et al., Citation2013), which examines people’s big five personality traits. The 10-item scale was rated on a Likert-scale between 1 (Absolutely not agree) and 7 (Absolutely agree) and evaluated the following five factors: Extraversion (α = 0.82), Agreeableness (α = 0.79), Conscientiousness (α = 0.83), Neuroticism (α = 0.81) and Openness (α = 0.78).
3.2.5. Sensation seeking
To assess the personality tendency of sensation seeking, we used The Experience Seeking and Boredom Susceptibility subscales of the Sensation Seeking Scale (Zuckerman et al., Citation1978). The 10-item scale was rated on a Likert-scale between 1 (Absolutely not agree) and 7 (Absolutely agree), and had a high internal reliability, α = 0.81.
3.3. Procedure
Data were gathered using a cross sectional study between January and May 2021. Participants were randomly chosen from a web-based panel among a sample of Hebrew speaking, Jewish adults, between 18 and 70 years. The sample was provided by the national digital collection agency iPanel, which maintains a demographically diverse Web panel of subjects who opt-in to taking selected surveys. A stratified sample was drawn utilizing specified quotas (Fricker, Citation2016), with the aim of constructing a representative sample of the Jewish population in Israel. This study was approved by the Institutional Review Board (IRB) of Reichman University. All information was recorded anonymously, and respondents were assured that identification and personal information were protected.
3.4. Data analysis
Data were entered and analyzed using SPSS version 27. First, descriptive statistics were produced using means and standard deviations for all variables. Correlations between socio-demographic variables, and personality traits with AV acceptance aspects, were assessed using Pearson correlations. To examine the indirect effects of sensation seeking and big-five traits on AV acceptance, mediated by desirability of control and driving locus of control, path analysis model was performed. The following indices were used to evaluate the model: chi-squared, which is acceptable when the value is not significant; the goodness of fit index (GFI), the comparative fit index (CFI), and the non-normed fit index (NNFI), (adequate values—above 0.90, excellent fit—above 0.95); and the root mean square error of approximation (RMSEA) (adequate values—less than 0.08, excellent fit—less than 0.06). The standardized root mean square residual (SRMR) was also used to assess model fit with values ranging from less than from 0.08 (adequate value) to 0.05 or less (considered reasonable) (Arbuckle, Citation2013; Byrne, 2010). The path analysis model was tested using AMOS software. Level of significance (p-value) was 5%.
4. Results
4.1. Validity and reliability tests
presents reliability, validity and Pearson correlations between study variables.
Table 2. Reliability, validity and Pearson correlations between study variables
The constructs’ convergent and discriminant validity were assessed through a confirmatory factor analysis. Average variance extracted (AVE) and composite reliability (CR) form convergent validity. To obtain convergent and discriminant validity, the AVE should be > 0.40 (Floyd & Widaman, Citation1995) and the CR > 0.60 (Bagozzi & Yi, Citation1988). Discriminant validity is established by comparing AVE values need with the squared inter-construct correlation estimates (SIC). As shown in , AVE values are between 0.61 (agreeableness) and 0.76 (Desirability of Control), and CR values range between 0.78 (openness to experience) and 0.90 (AV acceptance). Thus, all AVE and CR values are acceptable.
Factor weights were acceptable for desirability of Control (0.69–0.78), Internal driving locus of control (0.71–0.83), External driving locus of control (0.75–0.88), sensation seeking (0.61–0.73), extraversion (0.71–0.75), agreeableness (0.64–0.69), conscientiousness (0.68–0.71), neuroticism (0.63–0.67), openness (0.62–0.65) and AV acceptance (0.71–0.89).
The descriptive statistics show that the participants in the sample rated relatively high desirability of control (M = 5.01, SD = 0.77), and moderate internal (M = 3.76, SD = 0.98), and external (M = 3.75, SD = 0.81) locus of control. In addition moderate sensation seeking was rated (M = 3.87, SD = 1.22). As for big five traits, participants were mostly characterized by high conscientiousness (M = 5.31, SD = 1.12) and relatively low neuroticism (M = 3.42, SD = 1.27). The total AV acceptance score was moderate (M = 3.90, SD = 0.94).
4.2. Bivariate correlations between study variables
Assessing the associations between Socio-demographic variables and trust in AV, results show that overall, males demonstrate higher acceptance in comparison with females (r = 0.28, p < 0.01). Specifically, males reported higher trust (r = 0.34, p < 0.01), cost-effectiveness (r = 0.17, p < 0.01), compatibility (r = 0.23, p < 0.01), usefulness (r = 0.25, p < 0.01), ease of use (r = 0.20, p < 0.01), positive experience (r = 0.10, p < 0.05) and intention to use (r = 0.25, p < 0.01) in comparison with females.
In addition, age was positively related with higher compatibility (r = 0.13, p < 0.01), enjoyment of driving (r = 0.11, p < 0.05) and intention to use (r = 0.14, p < 0.01) compared with young individuals. Education is positively related to AV acceptance (r = 0.14, p < 0.01), with higher trust (r = 0.10, p < 0.05), Compatibility (r = 0.13, p < 0.01), enjoyment of driving (r = 0.12, p < 0.05) and stronger intention to use (r = 0.16, p < 0.01). Assessing the personality traits related to AV acceptance, results showed that high desirability of control is related with low compatibility (r = −.14, p < 0.01), low enjoyment of driving (r = −0.25, p < 0.01) and low positive experience with automation (r = −0.24, p < 0.01). However, high desirability of control is positively correlated with the perceived ease of use of automation (r = 0.10, p < 0.01).
Internal driving locus of control is negatively related with automatization of human tasks (r = −0.18, p < 0.05), but positively related with usefulness (r = 0.15, p < 0.05). However, external driving locus of control is positively correlated with higher compatibility (r = 0.17, p < 0.05), enjoyment of driving (r = 0.11, p < 0.05), ease of use (r = 0.23, p < 0.01) and intention to use automation (r = 0.12, p < 0.05), resulted in higher acceptance (r = 0.23, p < 0.01).
Examining the association between sensation seeking and AV acceptance, showed that individuals high in sensation seeking tend to experience less enjoyment of AV driving (r = −0.21, p < 0.01) and less cost-effective perception of AV (r = −0.10, p < 0.05). However, they report high perceived usefulness of AV (r = 0.11, p < 0.05).
Examining big five traits, showed that extraversion is positively related to trust in AV (r = 0.13, p < 0.05), and acceptance (r = 0.12, p < 0.05). Agreeableness is positively related to trust (r = 0.15, p < 0.01), compatibility (r = 0.13, p < 0.01), usefulness (r = 0.14, p < 0.01), ease of use (r = 0.15, p < 0.01), intention to use (r = 0.10, p < 0.05) and total acceptance (r = 0.15, p < 0.01).
High neuroticism is related with low trust (r = −0.12, p < 0.05), low usefulness (r = −0.16, p < 0.01), low ease of use (r = 0.21, p < 0.01). and low positive experience with automation (r = −0.18, p < 0.01), resulted in lower acceptance (r = −0.11, p < 0.05).
Overall, positive attitudes towards AV acceptance are demonstrated by individuals with low desirability of control, high external locus of control, high agreeableness, low neuroticism and low sensation seeking.
4.3. Hypotheses testing
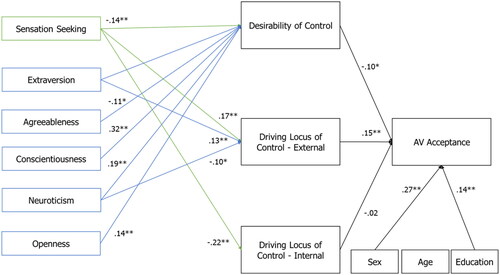
To assess the hypothesized model, path analysis was performed. In order to test the research hypotheses, sensation seeking, and big-five traits were exogenous variables, desirability of control and driving locus of control served as mediators, and total acceptance was the outcome tested. In addition, we controlled for the influence of sex and education. The model showed acceptable fit, χ2 (32) = 47.45, p = 0.036, CFI = 0.95, GFI = 0.94, NFI = 0.94, RMSEA = 0.03, SRMR = 0.07.
Results show that the desirability of control was negatively correlated with AV acceptance (β = −0.10, p < 0.05), supporting H1. In addition, external LOC was positively correlated with AV acceptance (β = 0.15, p < 0.01), supporting H2a. However, internal LOC was not found to be associated with AV acceptance (β = 0.02, p = 0.79). Hence H2b was not supported.
Examining the mediation hypothesis regarding sensation seeking, showed a significant indirect effect throughout external driving locus of control (β = 0.04, p < 0.05), in addition to a direct effect (β = 0.18, p < 0.05), presenting a partial mediation. Hence, individuals high in sensation seeking, perceive high external driving locus of control, and low desirability to control, which in turn leads to low AV acceptance. Hence H3 was supported.
A significant indirect effect was found for the relationship between extraversion and AV acceptance throughout external driving locus of control (β = 0.02, p < 0.05) in addition to a direct effect (β = 0.07, p < 0.05), presenting a partial mediation. Specifically, individuals high in extraversion, perceive high external driving locus of control, which in turn leads to high AV acceptance. Hence H4 was supported.
As for agreeableness and AV acceptance, results showed that agreeableness leads to lower desirability of control (β = −0.11, p < 0.05), but not to external (β = 0.01, p = 0.87), or internal LOC (β = 0.02, p = 0.72). No indirect effect was found (β = 0.01, p = 0.76). However, a direct effect between agreeableness and AV acceptance was found (β = 0.15, p < 0.05). Therefore, H5 was not supported.
A significant indirect effect was found for the relationship between conscientiousness and AV acceptance throughout desirability of control (β = 0.03, p < 0.05), without a direct effect (β = 0.01, p = 0.82). That is, individuals high in conscientiousness, perceive high desirability of control, which in turn leads to low AV acceptance. An overall negative relationship between conscientiousness and AV acceptance is demonstrated. Hence H6 was not supported.
Neuroticism was also found with a significant indirect effect was also found throughout desirability of control and external driving locus of control (β = −0.03, p < 0.05), in addition to a direct effect (β = −0.06, p < 0.05), presenting a partial mediation. Specifically, high neuroticism was positively related to desirability of control, but negatively related to external locus of control, which in turn lead to overall low AV acceptance. Hence H7 was supported.
Finally, openness to experience was found to be positively related to desirability of Control (β = 0.14, p < 0.01). However, no indirect effect was found (β = 0.01, p = 0.63). H8 was not supported (see ).
Figure 2. Standardized coefficients of path analysis model for the relations between sensation seeking, big-five traits and AV acceptance, mediated by desirability of control and driving locus of control. *p < 0.05, **p < 0.01; Note: only significant paths are presented.
Examining the reversed model yielded poor goodness of fit indices, χ2 (18) =185.19, p < 0.001, CFI = 0.53, GFI = 0.76, NFI = 0.54, RMSEA = 0.14, SRMR = 0.12.
5. Discussion
Despite the benefits of AVs for increasing driving safety and passengers’ comfort, they are faced in front a significant challenge of public acceptance. Framing this challenge throughout the Technology Acceptance Model has provided insights that emphasized the roles of perceived usefulness, perceived ease of use and, more importantly trust, in accepting AVs (Hegner et al., Citation2019; Wu et al., Citation2021; Yuen et al., Citation2020). However, to enrich the understanding of AV adoption, it is vital to understand the contribution of key personality traits (Amichai-Hamburger et al., Citation2022; Qu et al., Citation2021). As literature shows, the fear of giving up the control to the AV is the predominant psychological barrier for driving AV in the public sphere (e.g. Hegner et al., Citation2019). However, the role of control concerns in the relationship between key personality traits and AV acceptance remained unclear. The current study aimed to address this gap, and therefore examined how desirability of control and locus of control mediate the relationships between sensation seeking, big five traits, and AV acceptance.
Our model shows that high desirability of control is positively associated with lower acceptance in an AV, specifically with low compatibility, low enjoyment of driving and low positive experience with automation. We also demonstrated that external LOC is positively correlated with the acceptance in an AV, meaning that individuals who perceive external (rather than internal) factors as highly affect driving, tend to give up their own control in the vehicle. As for internal LOC, we found that individuals who report high levels of this trait, less enjoy driving AV but perceive high usefulness. Overall, these findings suggest that for people to trust AV, especially in higher levels of automation (SAE 4 or 5), they need to have some sense of controlling the vehicle, even though, most of the driving is determined solely by the vehicle’s sensors and computer. Individuals who have a high need to control uncertain situations are most likely to avoid using AVs. On the other hand, people who attribute higher importance to external circumstances while driving (e.g. weather, road quality, other drivers), and less perceive themselves as efficacious agents to control driving outcomes, will adopt AV more easily (April et al., Citation2012; Payre et al., Citation2014). These results are in line with previous studies that emphasized the importance of trust and feeling in control as main factors that determine AV acceptance (Hegner et al., Citation2019; Lee et al., Citation2015).
In this study, we focused on controllability as a mechanism that connects between sensation seeking or big-five traits with AV acceptance. Overall, we found that the desirability of control and external LOC play a central role in explaining interpersonal differences in accepting AV according to personality profiles. Specifically, we demonstrated that individuals high in sensation seeking perceive low external driving LOC, which in turn leads to low AV acceptance. These results indicate that these people constantly seek novel and intense situations, and therefore are less concerned about control issues (Armstrong et al., Citation2020). One might assume that this ability to hand over control quickly and easily would make them early adopters of AVs. However, giving out control also means that they have a very little impact on the level of driving intensity, and therefore they feel driving is perceived as much less pleasurable and enjoyable in comparison with driving themselves (Eckoldt et al., Citation2012; Kyriakidis et al., Citation2015; Rödel et al., Citation2014). However, the need for high sensation that is not meet due to the autonomous driving, could be addressed by creating other exciting experiences while driving (e.g. choosing a driving route with fascinating views, or gaming).
Our results also suggest that external LOC mediates between extraversion and high acceptance of AV. Individuals high in extraversion are characterized as being talkative, energetic, assertive, and outgoing, and therefore they tend to engage with their environment, and specifically with social interactions. As such they might feel that their behaviors are affected, at least to some extent, by external factors in their environment. In turn, high dominance of external factors increases the readiness of these individuals to drive AVs. These results are in line with previous studies that demonstrated the positive relationship between extraversion and the willingness to be engaged with novel and exciting behaviors (Deck et al., Citation2012; Oehler & Wedlich, Citation2018). Moreover. Since driving occurs automatically, the advanced communication systems in AVs could also support the needs of individuals high in extraversion in social interactions using social network sites, or by virtual reality (Amichai-Hamburger et al., Citation2022).
As opposed to extroverts, people high in neuroticism have more negative affect, their attention is more biased towards negative and threating information, and hence, they are risk averse (Noguchi et al., Citation2006; Oehler et al., Citation2018). When they engage in what they perceive as risk situations, they have a strong need to feel in control. For these people, driving an AV is perceived as a dangerous situation, in which they feel low trust, low positive experience and negative perceptions of the usefulness and ease of use of driverless cars (Nees et al., Citation2021). Our model suggests that neurotic individuals tend to seek control, trust mostly on themselves and much less on external factors to determine their personal safety on the road. Therefore, high sense of control is perceived as crucial mental resource to cope with anxiety that could evoke from driving an AV.
Finally, we demonstrated that individuals who report high conscientiousness, have a high need to control, which in turn leads to low AV acceptance. This mediation effect does not involve internal or external locus of control. Conscientious people tend to think carefully before making decisions, and perceive high importance with self-discipline and being well-organized. Hence they assess themselves as more risk averse and perceive experiences in a more risky way in comparison with others (Becker et al., Citation2012; Schwebel et al., Citation2006). In the context of AVs, our results in line with previous studies, that showed conscientious individuals desire to feel more in control AV, for example, by receiving rich and structured information from the autonomous car along driving (Amichai-Hamburger et al., Citation2020; Citation2022).
Overall, our model demonstrates that controllability plays a central role in increasing trust in AV. These findings replicate and strengthen former studies (Acheampong & Cugurullo, Citation2019; Hegner et al., Citation2019; Kaye et al., Citation2021; Rice et al., Citation2021), which predicted AV user experience using the Technology Acceptance framework (Davis, Citation1989). Our study contributes to the literature by providing a better understanding of the importance of designing AV with a sense of controlling the vehicle. This design could be achieved in several ways. Firstly, providing passengers clear and rich information of the driving is an important tool to support both cognitive (knowledge-driven) and affective (emotion-driven) sense of control in the vehicle, which in turn enhances trust in AV. This information should include driving route, vehicle’s intentions, early signals regarding upcoming hazards and how the AV is about to cope with them. Secondly, AVs should provide passengers with the option to take control when they would want to do so. Merely by providing this option, most passengers will probably feel safer. Thirdly, passengers should feel that in case of feeling anxious, they could communicate with a human assistance while driving. This recommendation is in line with previous studies that showed using of linguistic politeness in vehicle speech interfaces increases trustworthy in the AV (Lee & Lee, Citation2022).
Finally, building control and trust are gradual processes that are largely dependent in the technological reliability and trustworthy of the AV. The more the AV is perceived as competent, the more individuals will enable the system the right to operate autonomously, handing over control to the vehicle (Hoff & Bashir, Citation2015; Lee et al., Citation2015).
With the advancement of technology, the level of automation provided by a vehicle’s computers and sensors is increasing. Consequently, the issue of a sense-of-control, from both academic and industrial viewpoints, becomes even more critical. The acceptance rate of autonomous vehicles is closely related to the market penetration rate (MPR), and understanding the factors that influence acceptance is essential for predicting MPR accurately. Our method has the potential to be useful for predicting MPR. Specifically, by incorporating personality traits and controllability as predictors, our model can provide a more accurate estimation of the acceptance rate, which in turn can help predict MPR more precisely.
Limitations and future directions
Our results should be considered in light of several limitations. Firstly, to achieve relatively large sample, we used a cross-sectional design, asking participants to report their perception of driving AV, without really experiencing driving such vehicle. Although this limitation is common to most of the studies in this domain, it is important to note that our results, and especially the vital role of controllability in trusting AV, might change in case of real-world experience of driving AV. This direction should be further examined in simulators or real AVs. Secondly, in our model we used the most investigated personality traits in the literature of driving. It is important that future studies will elaborate and enrich the perception of personality in the context of driving AV. Thirdly, as the technology and marketing of AV rapidly grow, it is important to examine our model from a socio-economic perspective and to map the main external factors that could determine AV acceptance, in addition to the personality models we have presented. Finally, one main assumption underlies this work is that AVs should be designed to address drivers’ personalities, and even have human-like personalities to improve AV-driver communication. However, this assumption holds a controversy. Critics argue that human-like AVs may be more prone to errors and biases, as they may be influenced by emotions and personal preferences. This could lead to unpredictable behavior and potentially dangerous situations. Hence, our results should be interpreted and implemented by considering this perspective.
Conclusions
Our study presents an integrative model that explains how dominant personality traits are associated with the acceptance of AV, and especially, how controllability mediates between personality traits and forming trust in AV. Our model could benefit both researches and the AV industry to increase the personalization of driving AV according to main personality traits, by emphasizing the importance of providing a sense of control in the vehicle.
Authors’ contribution
Yaron Sela—study concept and design, analysis and interpretation of data, statistical analysis; Yair Amichai-Hamburger—study concept and design, study supervision.
Disclosure statement
No potential conflict of interest was reported by the author(s).
Additional information
Notes on contributors
Yaron Sela
Yaron Sela is a licensed clinical psychologist, and a senior research associate in the Center of Internet Psychology (CIP) in Reichman university, Israel. His research focuses on the psychological aspects of technology, emotional regulation mechanisms in the context of using technology, and factors affecting technology adaptation.
Yair Amichai-Hamburger
Yair Amichai-Hamburger is a Professor of Psychology and Communications at Reichman University, Israel. He is Director of the Research Center for Internet Psychology. Yair has studied human interaction with technology for over 30 years. He is a proflic author and a sought after speaker.
References
- Acheampong, R. A., & Cugurullo, F. (2019). Capturing the behavioural determinants behind the adoption of autonomous vehicles: Conceptual frameworks and measurement models to predict public transport, sharing and ownership trends of self-driving cars. Transportation Research Part F: Traffic Psychology and Behaviour, 62, 349–375. https://doi.org/10.1016/j.trf.2019.01.009
- Ajzen, I., & Fishbein, M. (1975). A Bayesian analysis of attribution processes. Psychological Bulletin, 82(2), 261–277. https://doi.org/10.1037/h0076477
- Amichai-Hamburger, Y., Kaynar, O., & Fine, A. (2007). The effects of need for cognition on Internet use. Computers in Human Behavior, 23(1), 880–891. https://doi.org/10.1016/j.chb.2006.03.002
- Amichai-Hamburger, Y., & Vinitzky, G. (2010). Social network use and personality. Computers in Human Behavior, 26(6), 1289–1295. https://doi.org/10.1016/j.chb.2010.03.018
- Amichai-Hamburger, Y., Mor, Y., Wellingstein, T., Landesman, T., & Ophir, Y. (2020). The personal autonomous car: Personality and the driverless car. Cyberpsychology, Behavior and Social Networking, 23(4), 242–245. https://doi.org/10.1089/cyber.2019.0544
- Amichai-Hamburger, Y. A., Sela, Y., Kaufman, S., Wellingstein, T., Stein, N., & Sivan, J. (2022). Personality and the autonomous vehicle: Overcoming psychological barriers to the driverless car. Technology in Society, 69, 101971. https://doi.org/10.1016/j.techsoc.2022.101971
- April, K. A., Dharani, B., & Peters, K. (2012). Impact of locus of control expectancy on level of well-being. Review of European Studies, 4, 124.
- Arbuckle, J. L. (2013). Amos 22 user’s guide. SPSS.
- Armstrong, T. A., Boisvert, D., Wells, J., & Lewis, R. (2020). Extending Steinberg’s adolescent model of risk taking to the explanation of crime and delinquency: Are impulsivity and sensation seeking enough? Personality and Individual Differences, 165, 110133. https://doi.org/10.1016/j.paid.2020.110133
- Bagozzi, R. P., & Yi, Y. (1988). On the evaluation of structural equation models. Journal of the Academy of Marketing Science, 16(1), 74–94. https://doi.org/10.1007/BF02723327
- Barrick, M. R., & Mount, M. K. (1991). The big five personality dimensions and job performance: A meta‐analysis. Personnel Psychology, 44(1), 1–26. https://doi.org/10.1111/j.1744-6570.1991.tb00688.x
- Becker, A., Deckers, T., Dohmen, T., Falk, T., & Kosse, F. (2012). The relationship between economic preferences and psychological personality measures. Working Paper No. 6470. CESifo, Bonn.
- Blut, M., Wang, C., & Schoefer, K. (2016). Factors influencing the acceptance of self-service technologies: A meta-analysis. Journal of Service Research, 19(4), 396–416. https://doi.org/10.1177/1094670516662352
- Burger, M. J., & Cooper, M. H. (1979). The desirability of control. Motivation and Emotion, 3(4), 381–393. https://doi.org/10.1007/BF00994052
- Choi, J. K., & Ji, Y. G. (2015). Investigating the importance of trust on adopting an autonomous vehicle. International Journal of Human-Computer Interaction, 31(10), 692–702. https://doi.org/10.1080/10447318.2015.1070549
- Davis, F. D. (1989). Perceived usefulness, perceived ease of use, and user acceptance of information technology. MIS Quarterly, 13(3), 319–340. https://doi.org/10.2307/249008
- Deck, C., Lee, J., Reyes, J., & Rosen, C. (2012). Risk-taking behavior: An experimental analysis of individuals and dyads. Southern Economic Journal, 79(2), 277–299. https://doi.org/10.4284/0038-4038-2010.026
- Eckoldt, K., Knobel, M., Hassenzahl, M., & Schumann, J. (2012). An experiential perspective on advanced driver assistance systems. itit, 54(4), 165–171. https://doi.org/10.1524/itit.2012.0678
- Floyd, F. J., & Widaman, K. F. (1995). Factor analysis in the development and refinement of clinical assessment instruments. Psychological Assessment, 7(3), 286–299. https://doi.org/10.1037/1040-3590.7.3.286
- Fricker, R. D. (2016). Sampling methods for online surveys. The SAGE Handbook of Online Research Methods, 12(3), 184–202.
- Gardner, B., & Abraham, C. (2007). What drives car use? A grounded theory analysis of commuters’ reasons for driving. Transportation Research Part F: Traffic Psychology and Behaviour, 10(3), 187–200. https://doi.org/10.1016/j.trf.2006.09.004
- Gebhardt, W. A., & Brosschot, J. F. (2002). Desirability of control: Psychometric properties and relationships with locus of control, personality, coping, and mental and somatic complaints in three Dutch samples. European Journal of Personality, 16(6), 423–438. https://doi.org/10.1002/per.463
- Gefen, D., & Straub, D. W. (2004). Consumer trust in B2C e-Commerce and the importance of social presence: Experiments in e-Products and e-Services. Omega, 32(6), 407–424. https://doi.org/10.1016/j.omega.2004.01.006
- Hamburger, Y. A., Sela, Y., Kaufman, S., Wellingstein, T., Stein, N., & Sivan, J. (2022). Personality and the autonomous vehicle: Overcoming psychological barriers to the driverless car. Technology in Society, 69, 101971. https://doi.org/10.1016/j.techsoc.2022.101971
- Hegner, S. M., Beldad, A. D., & Brunswick, G. J. (2019). In automatic we trust: Investigating the impact of trust, control, personality characteristics, and extrinsic and intrinsic motivations on the acceptance of autonomous vehicles. International Journal of Human–Computer Interaction, 35(19), 1769–1780. https://doi.org/10.1080/10447318.2019.1572353
- Herrenkind, B., Brendel, A. B., Nastjuk, I., Greve, M., & Kolbe, L. M. (2019). Investigating end-user acceptance of autonomous electric buses to accelerate diffusion. Transportation Research Part D: Transport and Environment, 74, 255–276. https://doi.org/10.1016/j.trd.2019.08.003
- Hills, P., & Argyle, M. (2001). Emotional stability as a major dimension of happiness. Personality and Individual Differences, 31(8), 1357–1364. https://doi.org/10.1016/S0191-8869(00)00229-4
- Hoff, K. A., & Bashir, M. (2015). Trust in automation: Integrating empirical evidence on factors that influence trust. Human Factors, 57(3), 407–434. https://doi.org/10.1177/0018720814547570
- Hong, J. W., Cruz, I., & Williams, D. (2021). AI, you can drive my car: How we evaluate human drivers vs. self-driving cars. Computers in Human Behavior, 125, 106944. https://doi.org/10.1016/j.chb.2021.106944
- Jing, P., Xu, G., Chen, Y., Shi, Y., & Zhan, F. (2020). The determinants behind the acceptance of autonomous vehicles: A systematic review. Sustainability, 12(5), 1719. https://doi.org/10.3390/su12051719
- Johnson, T., & Joshi, A. (2018). Review of vehicle engine efficiency and emissions. SAE International Journal of Engines, 11(6), 1307–1330. https://doi.org/10.4271/2018-01-0329
- Johansson, M., Mullaart Söderholm, M., Novakazi, F., & Rydström, A. (2021). The decline of user experience in transition from automated driving to manual driving. Information, 12(3), 126. https://doi.org/10.3390/info12030126
- Kaur, K., & Rampersad, G. (2018). Trust in driverless cars: Investigating key factors influencing the adoption of driverless cars. Journal of Engineering and Technology Management, 48, 87–96. https://doi.org/10.1016/j.jengtecman.2018.04.006
- Kaye, S. A., Lewis, I., Forward, S., & Delhomme, P. (2020). A priori acceptance of highly automated cars in Australia, France, and Sweden: A theoretically-informed investigation guided by the TPB and UTAUT. Accident; Analysis and Prevention, 137, 105441. https://doi.org/10.1016/j.aap.2020.105441
- Kaye, S. A., Somoray, K., Rodwell, D., & Lewis, I. (2021). Users’ acceptance of private automated vehicles: A systematic review and meta-analysis. Journal of Safety Research, 79, 352–367. https://doi.org/10.1016/j.jsr.2021.10.002
- Klauer, S. G., Guo, F., Simons-Morton, B. G., Ouimet, M. C., Lee, S. E., & Dingus, T. A. (2014). Distracted driving and risk of road crashes among novice and experienced drivers. The New England Journal of Medicine, 370(1), 54–59. https://doi.org/10.1056/NEJMsa1204142
- Krueger, R., Rashidi, T. H., & Rose, J. M. (2016). Preferences for shared autonomous vehicles. Transportation Research Part C: Emerging Technologies, 69, 343–355. https://doi.org/10.1016/j.trc.2016.06.015
- Kyriakidis, M., Happee, R., & de Winter, J. C. (2015). Public opinion on automated driving: Results of an international questionnaire among 5000 respondents. Transportation Research Part F: Traffic Psychology and Behaviour, 32, 127–140. https://doi.org/10.1016/j.trf.2015.04.014
- Lee, J. G., Kim, K. J., Lee, S., & Shin, D. H. (2015). Can autonomous vehicles be safe and trustworthy? Effects of appearance and autonomy of unmanned driving systems. International Journal of Human-Computer Interaction, 31(10), 682–691. https://doi.org/10.1080/10447318.2015.1070547
- Lee, J. G., & Lee, K. M. (2022). Polite speech strategies and their impact on drivers’ trust in autonomous vehicles. Computers in Human Behavior, 127, 107015. https://doi.org/10.1016/j.chb.2021.107015
- Luo, X., Ge, Y., & Qu, W. (2023). The association between the Big Five personality traits and driving behaviors: A systematic review and meta-analysis. Accident; Analysis and Prevention, 183, 106968. https://doi.org/10.1016/j.aap.2023.106968
- Montag, I., & Comrey, A. L. (1987). Internality and externality as correlates of involvement in fatal driving accidents. Journal of Applied Psychology, 72(3), 339–343. https://doi.org/10.1037/0021-9010.72.3.339
- Nees, M. A. (2016). Acceptance of self-driving cars. Proceedings of the Human Factors and Ergonomics Society Annual Meeting, 60(1), 1449–1453. https://doi.org/10.1177/1541931213601332
- Nees, M. A., Herwig, K., Quigley, L., & Zhang, J. (2021). Relationships among driving styles, desire for control, illusion of control, and self-reported driving behaviors. Traffic Injury Prevention, 22(5), 372–377. https://doi.org/10.1080/15389588.2021.1909728
- Noguchi, K., Gohm, C. L., & Dalsky, D. J. (2006). Cognitive tendencies of focusing on positive and negative information. Journal of Research in Personality, 40(6), 891–910. https://doi.org/10.1016/j.jrp.2005.09.008
- Oehler, A., & Wedlich, F. (2018). The relationship of extraversion and neuroticism with risk attitude, risk perception, and return expectations. Journal of Neuroscience, Psychology, and Economics, 11(2), 63–92. https://doi.org/10.1037/npe0000088
- Oehler, A., Wendt, S., Wedlich, F., & Horn, M. (2018). Investors’ personality influences investment decisions: Experimental evidence on extraversion and neuroticism. Journal of Behavioral Finance, 19(1), 30–48. https://doi.org/10.1080/15427560.2017.1366495
- Özbek, V., Alnıaçık, Ü., Koc, F., Akkılıç, M. E., & Kaş, E. (2014). The impact of personality on technology acceptance: A study on smart phone users. Procedia - Social and Behavioral Sciences, 150, 541–551. https://doi.org/10.1016/j.sbspro.2014.09.073
- Payre, W., Cestac, J., & Delhomme, P. (2014). Intention to use a fully automated car: Attitudes and a priori acceptability. Transportation Research Part F: Traffic Psychology and Behaviour, 27, 252–263. https://doi.org/10.1016/j.trf.2014.04.009
- Qu, W., Sun, H., & Ge, Y. (2021). The effects of trait anxiety and the big five personality traits on self-driving car acceptance. Transportation, 48(5), 2663–2679. https://doi.org/10.1007/s11116-020-10143-7
- Rammstedt, B., Kemper, C. J., Klein, M. C., Beierlein, C., & Kovaleva, A. (2013). A short scale for assessing the big five dimensions of personality: 10 Item big five inventory (BFI-10). Methods, Data, Analyses, 7(2), 17. https://doi.org/10.12758/mda.2013.013
- Rice, S., Winter, S. R., Mehta, R., Tamilselvan, G., Anania, E. C., & Milner, M. N. (2021). Identifying the factors that predict a consumer’s willingness to ride in various types of driverless vehicles. Technology in Society, 64, 101476. https://doi.org/10.1016/j.techsoc.2020.101476
- Roccas, S., Sagiv, L., Schwartz, S. H., & Knafo, A. (2002). The big five personality factors and personal values. Personality and Social Psychology Bulletin, 28(6), 789–801. https://doi.org/10.1177/0146167202289008
- Rödel, C., Stadler, S., Meschtscherjakov, A., & Tscheligi, M. (2014). Towards autonomous cars: The effect of autonomy levels on acceptance and user experience [Paper presentation]. Proceedings of the 6th International Conference on Automotive User Interfaces and Interactive Vehicular Applications (pp. 1–8). ACM.
- Rudin-Brown, C. M., & Parker, H. A. (2004). Behavioural adaptation to adaptive cruise control (ACC): Implications for preventive strategies. Transportation Research Part F: Traffic Psychology and Behaviour, 7(2), 59–76. https://doi.org/10.1016/j.trf.2004.02.001
- Schoettle, B., Sivak, M. (2014). A survey of public opinion about autonomous and self-driving vehicles in the US, the UK, and Australia. http://deepblue.lib.umich.edu/bitstream/handle/2027.42/108384/103024.pdf?sequence=1&isAllowed=y
- Schwebel, D. C., Severson, J., Ball, K. K., & Rizzo, M. (2006). Individual difference factors in risky driving: The roles of anger/hostility, conscientiousness, and sensation-seeking. Accident; Analysis and Prevention, 38(4), 801–810. https://doi.org/10.1016/j.aap.2006.02.004
- Shabanpour, R., Golshani, N., Shamshiripour, A., & Mohammadian, A. K. (2018). Eliciting preferences for adoption of fully automated vehicles using best-worst analysis. Transportation Research Part C: Emerging Technologies, 93, 463–478. https://doi.org/10.1016/j.trc.2018.06.014
- Skippon, S. M., Kinnear, N., Lloyd, L., & Stannard, J. (2016). How experience of use influences mass-market drivers’ willingness to consider a battery electric vehicle: A randomised controlled trial. Transportation Research Part A: Policy and Practice, 92, 26–42. https://doi.org/10.1016/j.tra.2016.06.034
- Smolensky, M. H., Di Milia, L., Ohayon, M. M., & Philip, P. (2011). Sleep disorders, medical conditions, and road accident risk. Accident; Analysis and Prevention, 43(2), 533–548. https://doi.org/10.1016/j.aap.2009.12.004
- Svendsen, G. B., Johnsen, J. A. K., Almås-Sørensen, L., & Vittersø, J. (2013). Personality and technology acceptance: The influence of personality factors on the core constructs of the Technology Acceptance Model. Behaviour & Information Technology, 32(4), 323–334. https://doi.org/10.1080/0144929X.2011.553740
- Syahrivar, J., Gyulavári, T., Jászberényi, M., Ásványi, K., Kökény, L., & Chairy, C. (2021). Surrendering personal control to automation: Appalling or appealing? Transportation Research Part F: Traffic Psychology and Behaviour, 80, 90–103. https://doi.org/10.1016/j.trf.2021.03.018
- Tussyadiah, I. P., Zach, F., & Wang, J. (2017). Attitudes toward autonomous on demand mobility system: The case of self-driving taxi. In R. Schegg & B. Stangl (Eds.), Information & communication technologies in tourism (pp. 755–766). Springer International Publishing.
- Vlassenroot, S., Brookhuis, K., Marchau, V., & Witlox, F. (2010). Towards defining a unified concept for the acceptability of Intelligent Transport Systems (ITS): A conceptual analysis based on the case of Intelligent Speed Adaptation (ISA). Transportation Research Part F: Traffic Psychology and Behaviour, 13(3), 164–178. https://doi.org/10.1016/j.trf.2010.02.001
- Wu, Z., Zhou, H., Xi, H., & Wu, N. (2021). Analysing public acceptance of autonomous buses based on an extended TAM model. IET Intelligent Transport Systems, 15(10), 1318–1330. https://doi.org/10.1049/itr2.12100
- Yuen, K. F., Huyen, D. T. K., Wang, X., & Qi, G. (2020). Factors influencing the adoption of shared autonomous vehicles. International Journal of Environmental Research and Public Health, 17(13), 4868. https://doi.org/10.3390/ijerph17134868
- Zhang, T., Tao, D., Qu, X., Zhang, X., Lin, R., & Zhang, W. (2019). The roles of initial trust and perceived risk in public’s acceptance of automated vehicles. Transportation Research Part C: Emerging Technologies, 98, 207–220. https://doi.org/10.1016/j.trc.2018.11.018
- Zuckerman, M., Eysenck, S., & Eysenck, H. J. (1978). Sensation Seeking Scale, Form V. PsycTESTS Dataset.
- Zuckerman, M. (1994). Behavioral expressions and biosocial bases of sensation seeking. Cambridge University Press.
- Zuckerman, M. (2007). Sensation seeking and risky behavior. American Psychological Association.