
Abstract
In human-robot collaboration (HRC), operators work side by side with collaborative robots (cobots), a new type of machines able to function safely on tasks shared with humans. Despite the increasing presence of cobots in factories, the quality of experience associated by workers with HRC is an underexplored topic. This review is focused on the mental workload (MWL) reported by operators interacting with cobots, its major sources, and the potential solutions to optimize it during HRC. Out of 165 papers identified, 23 were selected as specifically devoted to the exploration of workers’ MWL in a HRC activity. Cobot motion, predictability, task organization and communication patterns emerged as the major factors contributing to operators’ MWL during HRC. Endowing cobots with the capacity to meet both task demands and human needs through modulation of motion rhythm, flexible physical interaction, and more efficient communication patterns may contribute to mitigating workers’ MWL.
1. Introduction
The European Foundation for the Improvement of Living and Working Conditions warned on the association of work-related stress with a variety of mental disorders (Parent-Thirion et al., Citation2007). Workplace stress is reported as a common phenomenon by around 51% of European workers (EU-OSHA, Citation2013); it also represents a serious concern for nearly 80% of the companies within the EU, as it contributes to about 50% of all lost working days. Occupational stressors can negatively affect employees’ job performance and satisfaction, commitment, subjective well-being, prosocial behaviour, and intention to stay (Darvishmotevali & Ali, Citation2020). A survey conducted by the European Agency for Safety and Health at Work (EU-OSHA, Citation2015; Rial-González et al., Citation2010) showed that work-related stress and psychosocial risks can cause mental and physical disorders, resulting in high costs for the individual, the economy, and the whole society.
One of the major dimensions of work-related stress investigated in the scientific literature is Mental Workload (MWL), a multidimensional construct that reflects the mental fatigue resulting from performing a task under demanding conditions, taking into account the operator’s capability to face those demands (Cain, Citation2007). Derived from the Cognitive Load Theory in the field of education (CLT: Sweller, Citation1988, Citation1994; Sweller et al., Citation1998), MWL has been investigated in different domains; as a consequence, a clear and universally accepted definition is still missing (Cain, Citation2007; Longo et al., Citation2022). In cognitive psychology, for example, it refers to the amount of working memory resources used during a task (Chen et al., Citation2016); in the ergonomics and human factors literature, it is labelled as mental effort or mental demand, and it represents the amount of mental activity required to perform a task (e.g. Van Acker et al., Citation2018; Young et al., Citation2015). The term workload can also refer to the demands imposed on the operator, the subjectively experienced effort, and the impact of those demands on the operator (Cain, Citation2007), or “the relationship between primary task performance and the resources demanded by the primary task” (Wilson & Sharples, Citation2015, p. 521). Suboptimal workload (overload or underload) may lead to errors, mistakes, and performance degradation (Young et al., Citation2015), and it may have detrimental health consequences in the long run (Holm, Citation2010; Holm et al., Citation2009; Young et al., Citation2015). More specifically, mental overload may lead to mental fatigue, lower selective attention, decreased performance, and lower efficiency at the workplace (González-Muñoz & Gutiérrez-Martínez, Citation2007; Lagomarsino et al., Citation2022); mental underload - for example, too limited stimulation in repetitive tasks - may also negatively affect attention levels, increasing the risk of errors and attentional lapses (Wickens et al., Citation1998; Wixted & O’Sullivan, Citation2014). An optimal level of mental workload can instead prevent errors, safety risks, and performance inefficiency (Brolin et al., Citation2017; Longo, Citation2015; Morton et al., Citation2019; Parmentier et al., Citation2020). Moreover, an optimal MWL level may sustain workers’ engagement, well-being and long-term mental and physical health (Brolin et al., Citation2017; Demerouti et al., Citation2020; S. Hopko et al., Citation2022; Kolbeinsson et al., Citation2017; Segura Parra et al., Citation2020).
1.1. MWL and stress: An intricate relationship
The relationship between MWL and stress is widely acknowledged (Gaillard, Citation1993; Citation2001; Macdonald, Citation2003; Niculescu et al., Citation2009). Several studies showed a significant strong positive correlation between these constructs (Alsuraykh et al., Citation2019; Gjoreski et al., Citation2017; Hou et al., Citation2015; Matthews et al., Citation2002). Such a strong relationship however becomes problematic when exploring MWL literature: In some studies, the term “mental stress” is used to refer to both dimensions (Hjortskov et al., Citation2004); in other studies, MWL is considered as a source of both stress (Macdonald, Citation2003; Pande, Citation1992), and stress responses (Sato et al., Citation2009); other works define stress as a core component of MWL (Alsuraykh et al., Citation2019; Castillo et al., Citation2021; Hart & Staveland, Citation1988; Kantowitz, Citation1987; Macdonald, Citation2003; Wierwille et al., Citation1985).
Some crucial differences were however detected between MWL and stress (Chen et al., Citation2016; Hidalgo-Muñoz et al., Citation2018). More specifically, it is possible to experience high mental workload in demanding conditions, without cognitive strain or adverse physiological effects; to the opposite, it is possible to experience high levels of stress in a low mental workload condition (Gaillard, Citation1993; Gaillard & Wientjes, Citation1994). This can be partially explained through the Appraisal Theory (Lazarus & Folkman, Citation1984) of stress: As the cognitive load increases, individuals tend to unconsciously evaluate their ability to cope with the demand. Stress would only arise when the situation is subjectively deemed as exceeding available personal resources; therefore, a highly demanding situation may be perceived as stressful or not, based on the individual perception of personal resources in facing it.
1.2. Cobots and MWL
Over the last decades the increase in automation, and specifically the massive introduction of robots, has brought about substantial changes in human operators’ role (Körner et al., Citation2019), job tasks’ structure, workers’ experience and MWL (Peeters & Plomp, Citation2022). Although robots convey benefits to humans, such as relieving them from tedious, repetitive, and dangerous tasks, they also require continuous monitoring; supervision tasks can be positively perceived as mentally stimulating, because they require knowledge and decision-making capabilities (Smids et al., Citation2020), but they can also make workers feel simple "machine controllers," rather than active agents in production. Moreover, automatization of workflow may result in new demands and stressors for human operators (Mital & Pennathur, Citation2004; Warm et al., Citation2008; Woods, Citation1996), such as increased workload, reduced control over tasks, lower skill mobilization and development, increased work pace, higher psychological pressure due to electronic performance monitoring (EPM, i.e. the use of technological instruments to observe, record, and analyse information directly or indirectly related to the workers job performance), reduced social interaction, higher psychological/cognitive demands, increased supervisory control, and job insecurity (Carayon et al., Citation1999).
In this context, a recent advancement in robotics technology is represented by cobots, collaborative robots that are increasingly used in laboratory and industrial environments. Compared to industrial robots, large machines positioned in an enclosed workspace with no or very limited interaction with workers, cobots are designed to physically interact with human operators in a shared workspace (International Organization for Standardization, Citation2016; Litzenberger, Citation2019). They are flexible and cost-effective machines with limited power and force, equipped with sensors and safety functions to minimize workers’ exposure to injury in case of contact; in addition, they can be easily modified to perform different tasks.
Cobots currently account for about 5% of all robot salesFootnote1, but this percentage is expected to jump to 34% in 2025, as reported by the International Federation of RobotsFootnote2. Their increasing presence in factories has promoted research about related human workers’ experience.
Thanks to their flexibility and limited dimensions, cobots can jointly work with humans through different interaction patterns: coexistence, cooperation, and collaboration. Coexistence is the weakest form of collaboration, as it simply implies the presence of humans and robots in the same working space, without direct contact (Wang et al., Citation2018). In cooperative tasks, the operator and the cobot share the same workspace and work at the same product, with direct contact if necessary. Each of them is responsible for a portion of the production task, but they do not depend on each other to reach the common goal (Gervasi et al., Citation2020; Roschelle & Teasley, Citation1995). Collaboration instead implies to share the same task on the same product or part of it, in the same workspace (Schmidtler et al., Citation2015): humans and robots work together to reach a common goal, continuously interacting, negotiating, understanding and accommodating to one another’s behaviour (Gervasi et al., Citation2020).
Working shoulder-to-shoulder with a collaborative robot modifies usual practices and poses several challenges to humans (Körner et al., Citation2019; Sauppé et al., Citation2015), as it implies changes in subjective job perception, intrinsic job structure (Fletcher & Webb, Citation2017; Wallace, Citation2021), and social relations at workplace (Maurtua et al., Citation2016; Michaelis et al., Citation2020; Wallace, Citation2021). The efficiency and tirelessness of robots may result in workers’ concerns about their job security and employment status (Abeliansky & Beulmann, Citation2019). The human-machine proximity elicits fear of potential harm (De Simone et al., Citation2022; Lu et al., Citation2022; Szalma & Taylor, Citation2011). In addition, the complexity of the interaction with cobots may increase workers’ mental workload, with negative consequences for their mental health (De Simone et al., Citation2022; Lu et al., Citation2022; Robelski & Wischniewski, Citation2016, Citation2018).
Besides challenges, collaborative robots can also lead to positive changes in the working place, as humans and machines can assist each other with complementary skills. Some studies have highlighted that cobots can relieve human operators from performing repetitive or heavy and dangerous tasks, thus supporting optimal levels of mental workload and increasing productivity (Welfare et al., Citation2019; Zanchettin et al., Citation2018).
The debate around the contribution of cobots to operators’ MWL is still ongoing. What is certain is that an appropriate level of cognitive workload needs to be granted in order to manage the machine’s impact on the operator, especially in terms of performance and safety (Panchetti et al., Citation2023). Therefore, understanding which factors influence MWL level and which solutions can be implemented to optimize it has become a crucial issue (Baltrusch et al., Citation2022; Van Acker et al., Citation2018; Young et al., Citation2015). Despite the growing interest in the investigation of mental workload (Faccio et al., Citation2023), most studies in the domain of HRC are aimed at understanding how to improve performance of the human-cobot team (Storm et al., Citation2022; Lorenzini et al. Citation2023), whereas little is known about strategies and practical solutions to promote an optimal level of workers’ mental workload (Van Acker et al., Citation2018). For this reason, a scoping review of research studies investigating mental workload during HRC was undertaken, paying specific attention to the approaches adopted to measure it, and to the main sources of MWL that were identified, with the aim of providing practical solutions for the implementation of healthy work settings. The following research questions were formulated:
RQ1: Which measures are currently used to assess MWL during HRC in industrial contexts?
RQ2: Which are the prominent sources of MWL during collaboration with cobots in industrial tasks?
RQ3: Which solutions can be implemented to attain optimal levels of workers’ MWL in HRC?
2. Methods
A scoping review was deemed as the most adequate approach to pursue the study aims, as it allows for broadly mapping what is known about this topic, without excluding sources based on their publication venue, study design and quality, thus offering a broader scope for research questions (Levac et al., Citation2010). We followed the five stages for scoping reviews outlined by Arksey and O’Malley (Citation2005): (1) identifying the research question, (2) identifying relevant studies, (3) study selection, (4) charting the data, and (5) collating, summarizing, and reporting the results. In addition, the PRISMA-ScR checklist (included as electronic supplementary material) was used to guide reporting (Tricco et al., Citation2018). Ethical approval for this study was not required, as results were extracted from published papers and no primary data collection was performed.
2.1. Identifying relevant studies and eligibility criteria
Due to the multidisciplinary nature of the topic, the search was conducted on four different digital libraries, covering psychological and technological areas: Web of Science, Scopus, Psycinfo and IIEE Explore. Three sets of keywords were chosen, coherently with the three research questions (): The first set concerned keywords related to Human-Robot Collaboration (HRC); specifically, we decided to include studies involving tasks designed and described as collaborative, in which human operators and cobots are in the same workspace, working together to reach a common goal. This type of interaction requires a coordinated and synchronized activity from all parties involved, which also entails direct physical contact (haptic or auditory).
Table 1. Set of keywords used in the search.
The second set of keywords referred to mental workload. As described in the introductory section, there is a lack of clarity in how stress and MWL are related, because they are often used to describe similar phenomena. Moreover, the international standards on mental workload terminology (ISO, Citation2017) specifically endorse the connection of MWL with mental stress (intended as “total of all assessable factors impinging upon an individual mentally”; see ISO, Citation2017, Section 3.1.1) and mental strain (intended as “immediate effect of mental stress”; see ISO, Citation2017, Section 3.1.2) (Young et al., Citation2015). Therefore, following Alsuraykh and colleagues’ suggestion (2019), we decided to include both “mental workload” and “stress” in the search strategy.
Finally, in line with the aims of the study, the third keyword set circumscribed the search to industrial contexts. All possible combinations of keywords from the three sets were considered, using the Boolean “AND” operator between each set, and the “OR” operator within each set. The asterisk was used as a truncation function, which allows for searching a word through all its possible variants.
Searches covered titles, keywords, and abstracts of papers in the databases.
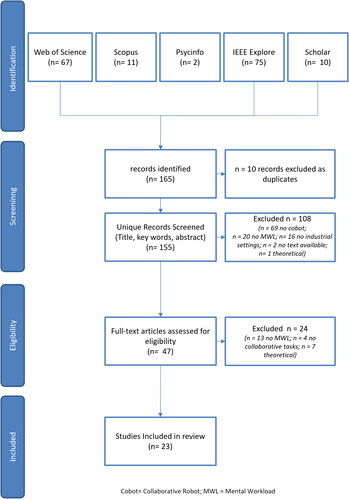
The search led to the identification of 155 publications; a manual search in Google Scholar based on the reference lists of the selected papers (snowballing method) or suggestions by experts allowed to identify 10 additional papers, leading to a corpus of 165 salient studies.
Publications referring to HRC with physical or virtual robots, and studies conducted in laboratory or work settings were deemed as relevant to the review purposes, regardless of their publication year.
Regarding restriction criteria, the review was limited to articles written in English, with full text available, and focused on MWL during HRC in real or simulated industrial settings. Additional exclusion criteria were text unavailability; study not related to all three sets of keywords; study not related to the industrial context; studies that focused solely on the physical dimension of workload assessment. Reviews and theoretical papers were excluded, but they were cited in the Introduction and Discussion sections of the present work, when appropriate.
2.2. Study selection
The selection process was articulated in two stages. After removal of duplicate records, two authors independently screened the publications according to their title, abstract and keywords. In the second stage, a careful reading of the full texts of the selected papers was undertaken, to identify the studies fully consistent with the research questions. Any discrepancy and disagreement were resolved by consensus or discussion among all authors. The Preferred Reporting Items for Systematic Reviews and Meta-Analysis (PRISMA) chart () was adopted to illustrate the phases of paper identification and selection.
Figure 1. Flow chart of the screening process.
2.3. Charting the data, collating, summarizing, and reporting the results
A standardized data extraction form was developed to guide data charting, and relevant information was extracted from the papers selected in the second stage of the screening. Specifically, the following fields were considered:
Main characteristics: Title, author(s), year of publication, journal/proceedings, country, area of research, and study aims (summarized in ). provides a visual description of the publication trend of the selected papers over time.
MWL measures: The research instruments adopted in the selected studies to assess MWL were divided into three categories: self-report, physiological and performance measures (see ).
Study design and findings: Setting, type of cobot, task, sample size, dependent and independent variables, and findings are reported in . also includes the factors representing potential sources of MWL associated with HRC identified in each paper, grouped into three categories: (1) Motions, predictability, and proximity of robot; (2) Robots’ communication skills; (3) Task organization.
Possible solutions identified to manage workers’ MWL: Solutions reported by the selected studies were described in the last paragraph of the result section.
Figure 2. Number of papers per year (up to June 2022).
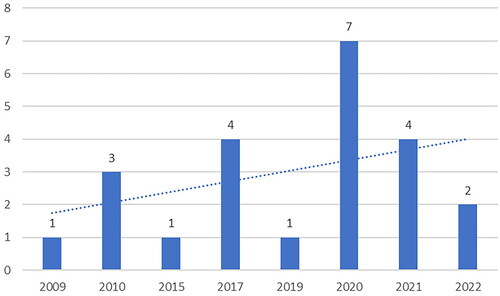
Table 2. Studies main characteristics.
Table 3. MWL measures used in the selected studies.
Table 4. Study design and findings.
3. Results
3.1. Study characteristics
The literature search was conducted in June 2022; the two-stage screening resulted in the inclusion of 23 publications, listed in .
As shown in , the selected papers were published between 2009 and 2022, with the majority being published in the last four years (N = 14, 60.9%). Most papers were included in conference proceedings (N = 15, 65.2%), while eight (34.8%) were published in peer-review journals.
Most studies (N = 17, 73.9%) were conducted in laboratory settings, three (13.0%) in virtual working scenarios, and one study (4.4%) in a simulation environment based on mathematical equations. Only two studies (8.7%) were conducted in factories with workers. Around half of the studies (N = 12, 52.2%) involved less than 20 participants, seven (30.4%) involved 20 to 50 participants, three (13.0%) more than 50, and one study (4.4%) was conducted through a mathematical simulation, without participants.
Concerning the methodology approach, eight (34.8%) of the selected papers proposed a solution to reduce MWL in the working context of HRC (Arntz et al., Citation2020; Bettoni et al., Citation2020; Lagomarsino et al., Citation2022; Messeri et al., Citation2023; Rahman & Wang, Citation2015; Rajavenkatanarayanan et al., Citation2020; Roncone et al., Citation2017; Tan et al., Citation2009). In one paper (4.4%), workers were directly invited to report perceived advantages and disadvantages of HRC collaboration (Brun & Wioland, Citation2021); in another paper (4.4%) a mathematical model was developed to analyse human cognitive performance during HRC (Rabby et al., Citation2019). The remaining studies (N = 13, 56.5%) investigated MWL and associated factors during HRC in laboratory settings.
3.2. Measures of mental workload
summarizes the MWL measures used in the selected papers, comprising physiological and self-report measures, as well as measures of performance. Six studies (26.1%) included all three types of assessment (Bettoni et al., Citation2020; Etzi et al., Citation2020; S. K. Hopko et al., Citation2021; Kato et al., Citation2010; Koppenborg et al., Citation2017; Zhao et al., Citation2020). Two types were adopted in nine studies (39,1%; Chacón et al., Citation2021; Fournier et al., Citation2022; Lagomarsino et al., Citation2022; Messeri et al., Citation2023, Citation2021; Pollak et al., Citation2020; Rahman & Wang, Citation2015; Roncone et al., Citation2017; Tan et al., Citation2009); more specifically, three studies combined physiological measures with performance data (Messeri et al., Citation2023, Citation2021; Tan et al., Citation2009), two included physiological and self-report measures (Lagomarsino et al., Citation2022; Pollak et al., Citation2020), three studies combined performance assessment and quantitative or qualitative self-report measures (Chacón et al., Citation2021; Fournier et al., Citation2022; Rahman & Wang, Citation2015; Roncone et al., Citation2017). Among the remaining eight studies (34.8%), three adopted only physiological measures (Arai et al., Citation2010; Fujita et al., Citation2010; Rajavenkatanarayanan et al., Citation2020), four only self-report instruments (Arntz et al., Citation2020; Brun & Wioland, Citation2021; Müller et al., Citation2017; Ustunel & Gunduz, Citation2017), and one paper relied on a mathematical procedure (Rabby et al., Citation2019).
3.2.1. Self-report measures
Self-reports are based on the assumption that individuals can evaluate and rate their own cognitive processes, including - for example - the level of mental workload during completion of a task (Anmarkrud et al., Citation2019, p. 5). Their advantages are low cost, high sensitivity, low intrusiveness, and high easiness. Their disadvantages include difficulties to compare results between participants, and the impossibility to administer them during the execution of the task, but only after interrupting or completing it (Butmee et al., Citation2019; Cain, Citation2007; Longo et al., Citation2022).
In over half of the selected studies (N = 14, 60.8%) MWL was assessed through self-report measures, primarily quantitative scales (N = 13, 56.5%, of which two were adapted versions of standardized questionnaires). Qualitative methods, such as interviews or open-ended questions, were adopted in three studies (13.0%).
The most frequently used instrument was the National Aeronautics and Space Administration-task load index (NASA-TLX; Hart, Citation2006), employed in 11 studies (47.8%). This multidimensional measure allows for assessing the association between perceived MWL and six factors: mental, physical, and temporal demands, performance level, effort, and frustration. Participants are invited to rate the level of MWL perceived in relation to each factor on scales ranging from 0 to 100. Single factor scores are then averaged to determine total MWL. The instrument has good reliability and validity; it is primarily used in the context of flight simulation, air traffic control, and vigilance tasks.
Considering the above-described interconnections between MWL and stress, three of the selected studies (13.0%) adopted stress scales. The Short Stress State Questionnaire (SSSQ; Helton, Citation2004), adopted in Müller et al. (Citation2017) is a 24-item instrument on a 5-point Likert-type scale, aimed at assessing the multiple dimensions of task related stress - task engagement, distress, and worry - in pre-task and post-task conditions. The Primary Appraisal Secondary Appraisal scale (PASA; Gaab, Citation2009), adopted in Pollak et al. (Citation2020), is designed according to the transactional stress theory. (Lazarus & Folkman, Citation1984). This instrument is aimed to measure threat and challenge as primary stress appraisals (PA) and perceived personal abilities and control expectancy as secondary appraisals (SA). It is composed by 16 items, rated on a 6-point scale (from strongly disagree to strongly agree; eight items assess PA and eight SA). In the selected paper including PASA (Pollak et al., Citation2020), two items referring to the event as stressful, challenging, or irrelevant were extrapolated from the primary appraisal subscale; similarly, two items concerning individual resources and options to deal with the stressor were selected from the secondary appraisal subscale. The Cohen’s Perceived Stress Scale (PSS-10) (Chan & Greca, Citation2013; Cohen, Citation1994; Cohen et al., Citation1997), adopted in another study (Arntz et al., Citation2020) is a 10-item questionnaire that measures the frequency of stress perception in life events and situations, on a scale ranging between 0 and 40.
3.2.2. Physiological measures
Measures assessing operators’ physiological response while executing a task allow for gathering continuous and objective data. Considered as highly sensitive to changes in workload, they are increasingly adopted in experimental settings, thanks to the evolution of sensor technologies (Longo et al., Citation2022). Physiological signals are also increasingly used to adjust cobots’ behaviour to the operator’s psychophysical state.
In 14 (60.9%) of the selected papers, physiological measures were used to assess MWL; more specifically, the electrodermal activity (EDA) was measured in six studies (26.1%; two of them also assessing heart rate signals), and heart activity (HR, Interbeat Rate or HRV) in 10 studies (43.5%).
The Electro Dermal Activity (EDA), or Galvanic Skin Response (GSR), also known as Skin Conductivity (SC), is one of the most accessible signals levered by the central nervous system. EDA is an effective indicator of physical and mental strain, as increased sweating of hand palms (typically characterizing mental strain) results in greater EDA and Skin Potential Response (SPR) spike amplitude and frequency (Arai et al., Citation2010; Fujita et al., Citation2010; Kato et al., Citation2010).
Electrocardiogram (ECG) can be used as a psychophysiological indicator of physical and mental stress through the evaluation of Heart Rate (HR) and Heart Rate Variability (HRV, the variation over time of the period between consecutive heart beats), both providing information on the person’s level of relaxation versus activation. HR increases with higher task demands (De Rivecourt et al., Citation2008), whereas HRV comprises sympathetic and parasympathetic components. A condition of heavy MWL is associated with increased sympathetic control and reduced vagal tone, with a decrease in HRV (Delliaux et al., Citation2019; Hjortskov et al., Citation2004; Li et al., Citation2022; Wang et al., Citation2005). One of the most common indicators of HRV is LF/HF ratio (low frequency band/high frequency band), that represents the dominance of the sympathetic nervous system with respect to the parasympathetic one.
3.2.3. Performance measures
Performance measures are used to quantify how well an operator is performing the assigned task, based on the assumption that optimal levels of MWL are associated with performance maximization, while decrease in performance reflects suboptimal workload levels. To this purpose, primary and secondary task performance measures can be used (Cain, Citation2007). The former directly assess the operator’s performance on the task of interest; the latter investigate the operator’s remaining cognitive reserves while performing the primary task. The adoption of a dual tasking methodology allows for assessing performance in primary and secondary tasks, and cognitive interference between them. Researchers in the domain of robotics have investigated the effects of various factors on dual-task performance, including embodiment, virtualization of human-robot interactions, and haptic feedback during teleoperation of mobile robots (Corujeira et al., Citation2017; Iwasaki et al., Citation2022; Nenna et al., Citation2023).
Over half of the selected articles (N = 13; 56.5%) adopted one or more performance measures - productivity, task completion time, performance efficiency, task accuracy - in combination with other measurement approaches; all these studies except one (Chacón et al., Citation2021) used primary task performance measures.
3.3. Sources of mental workload
Findings from the selected studies revealed different factors associated with workers’ MWL. Working side by side with cobots without any protective barrier can be demanding per se, especially in conditions of high speed and unpredictability of robots’ movements (De Simone et al., Citation2022); the cobot’s communication abilities and patterns, as well as its role in the collaborative task structure and organization can also contribute to operators’ MWL and stress. In the potential MWL sources investigated across studies are described in the column “independent variable”; in the same table, these sources are also classified into three typologies: Motions, predictability, and proximity; Robot Communication skills; Task organization. In the following paragraphs, a more detailed description of the related findings will be provided.
3.3.1. Motions, motion predictability and proximity
Closeness to moving cobots during collaborative assembly tasks can represent per se a source of psychophysiological strain (Arai et al., Citation2010; Fujita et al., Citation2010; Kato et al., Citation2010; Koppenborg et al., Citation2017), especially for naïve and less expert workers (Müller et al., Citation2017).
The combination of high speed and proximity was associated with participants’ higher levels of physiological reactions (i.e. skin conductance), and stress (Arai et al., Citation2010; Fujita et al., Citation2010; Kato et al., Citation2010; Tan et al., Citation2009). Compared to slow-motion situations, fast cobot motions were associated with higher stress levels also during interaction with a virtual robot, even though physiological data did not mirror subjective stress perception (Etzi et al., Citation2020). Robots’ higher working pace, posing time pressure on workers, also led to increased MWL (Bettoni et al., Citation2020; Rajavenkatanarayanan et al., Citation2020).
Motion trajectory is of great importance in HRC, as straight trajectories can increase stress and MWL compared to smooth ones (Arai et al., Citation2010; Fujita et al., Citation2010; Kato et al., Citation2010; Koppenborg et al., Citation2017). Unpredictable cobot motion can also increase stress, whereas providing workers with pre-knowledge and predictability cues can decrease it (Kato et al., Citation2010); low predictability of cobot motion was associated with higher risk perception, anxiety, mental workload, and a tendentially lower task performance in virtual settings as well (Koppenborg et al., Citation2017).
3.3.2. Robots’ communication skills
Cobots endowed with social skills can contribute to lower MWL thanks to better communication and synchronization of movements with workers. To investigate this aspect, Rahman and Wang (Citation2015) developed an affect-based robot able to express emotions coherent with the situation and the mental state of the co-workers. In their experiment, the robot’s emotional ability resulted in better communication, smooth workflow, clearer operating roles between teammates, and lower cognitive workload (Rahman & Wang, Citation2015). Another study showed that equipping an HRC working cell with augmented communication channels can increase predictability of the robot’s behaviour, thus decreasing workers’ stress and frustration; lack of information about the robot’s intentions may generate stress due to feelings of uncertainty and attempts to guess the machine’s subsequent actions (Arntz et al., Citation2020). In the same vein, providing a picture of the product that participants had to assemble with the cobot was associated with lower MWL (Ustunel & Gunduz, Citation2017). It is important to notice that information about tasks can be helpful to workers only if provided in the proper quantity and through an appropriate support; otherwise it may generate an increase in MWL (Arai et al., Citation2010; Kato et al., Citation2010).
Robot performance and reliability seem to influence MWL as well: According to the mathematical model developed by Rabby et al. (Citation2019), the association between human cognitive workload and task performance in an HRC framework varies according to task complexity and robot performance (i.e. human intervention required or not). Specifically, given a certain task complexity level, human cognitive workload decreases as the robot’s performance improves. As concerns cobot’s reliability, higher levels can reduce operator’s cognitive workload (Rabby et al., Citation2019).
3.3.3. Task organization
The introduction of cobots inevitably brings about changes in the organization of work. First, cobots are designed to perform heavy, dangerous and repetitive handling tasks in collaborative cells (Brun & Wioland, Citation2021), while workers are assigned primarily mental tasks, such as monitoring robot operations, production flow and quality, and troubleshooting malfunctions; this multifaceted role contributes to increased cognitive load and stress (Chacón et al., Citation2021), but also satisfaction and engagement, if the cobot is programmed to adapt to the worker’s needs (Brun & Wioland, Citation2021; Fournier et al., Citation2022). A robot able to offer proper support during collaborative activities may contribute to lower fatigue and MWL (Hopko et al., Citation2021). In addition, during the collaborative situation, study workers reported higher stress when they are assigned the role of task follower rather than task leader, most likely due to the perceived lack of control on the situation; the perception of control over the robot system is instead associated with lower stress levels (Pollak et al., Citation2020). Notably, in Messeri et al. (Citation2023), and in Roncone et al. (Citation2017), the productivity is higher when the robot guides the collaborative operations.
The level of interdependence, that is the extent to which one team member’s actions affect the performance of the other one, was also investigated by Zhao et al. (Citation2020) as a potential source of MWL variations, leading to the identification of three types of interdependence: Pooled interdependence (robot and worker complete tasks separately), sequential interdependence (robot and worker complete tasks together in a pre-defined order), and reciprocal interdependence (each partner specializes in a certain skill or specific aspect of the task). Participants in the reciprocal interdependence condition (i.e. in which humans perceived cobot as a teammate with shared responsibilities and goals) reported lower levels of stress compared to the other two conditions. Moreover, in the reciprocal interdependence condition, participants reported higher freedom in setting their work pace, at the same time perceiving collaboration with the robot, compared to sequential interdependence (Zhao et al., Citation2020).
3.4. How to reduce MWL: Solutions from the selected studies
The studies included in this review suggest that collaboration with cobots is intrinsically characterized by specific demands, that may increase human partners’ cognitive load, with detrimental effects on their mental health and task performance (Fallahi et al., Citation2016; Midha et al., Citation2022; Minowa, Citation2000; Shao et al., Citation2020). It is therefore crucial to design HRC systems capable of maximizing productivity while maintaining workers’ MWL levels within a healthy range (Baltrusch et al., Citation2022). Some of the selected papers propose solutions to this problem.
Bettoni et al. (Citation2020) implemented a smart decision maker system able to balance productivity and a general reduction of the workers’ mental and physical workload, based on physiological data gathered from operators through three different wearable devices: chest strap, wristband, and a smartwatch. The continuous monitoring of workers’ physiological parameters allows the system to adjust cobots’ actions to humans’ conditions along the entire production process, for example by proposing a different allocation of tasks to the workers, who can accept or refuse it through the touch screen of their smartwatches (Bettoni et al., Citation2020). This solution, tested at a manufacturing company on a workstation with four workers, was associated with globally lower mental and physical workload, higher job engagement, and less perceived monotony (Bettoni et al., Citation2020).
Another solution is represented by RobotAssist (Rajavenkatanarayanan et al., Citation2020), a multi-sensory minimally invasive HRC system that enables the cobot to assess the cognitive load of the human partner through ECG and EDA sensors, and to analyse and model them based on machine learning techniques.
The joint evaluation of the worker’s stress and productivity is the core of another potential solution (Messeri et al., Citation2021). Through an online control strategy, a learning automation system can modify the robot’s work pace over time, to guarantee the best compromise between mitigation of human stress and maximization of productivity. In another paper, a decision-making algorithm was developed to optimize productivity and mental fatigue based on HRV signals (Lagomarsino et al., Citation2022). The tuning algorithm allows for adapting robots’ motion characteristics and pace to workers’ mental states, regulating MLW and ensuring an optimal level of productivity. A similar solution is represented by a transparent task planner, embedded on a dual arm robot, able to perform basic evaluations of role assignments and task allocation (Roncone et al., Citation2017). The system introduces a shift in task allocation from human to robot based on the task completion time, freeing the operator from reasoning about the task, and leading to reduction in task completion time. Study participants expressed their preference for this allocation system compared to a traditional one, in which they were fully responsible for task definition, emphasizing that the reduction in cognitive load relieved them from the need to remember steps by heart and to waste less time in making decisions (Roncone et al., Citation2017).
4. Discussion
This scoping review was aimed at identifying the approaches adopted to investigate mental workload, and the prominent sources of mental workload detected in the literature concerning collaboration with cobots.
Almost all the selected studies were performed in laboratory settings, participants were volunteers, and the sample sizes were rather small (82.6% of the studies involved less than 50 participants; 52.2% less than 20). Moreover, the cobots used in laboratory experiments were equipped with single or dual robotic arms, thus reproducing a specific type of robot used in factories to perform assembly and pick and place tasks. Finally, the tasks in which the participants were engaged were generally short and isolated, and did not reflect the prolonged, continuous HRC operations that are commonly observed in industrial settings. Furthermore, the experimental design of the selected studies often lacked a multimodal approach, which further limits the generalizability of the findings to real-world industrial scenarios. These features limit the generalizability of the laboratory findings to real-world industrial settings. Further research with larger samples and longer task duration is needed to fully understand the impact of HRC on mental workload in real industry settings.
Discrepancies emerged in the relationship between cobot behaviour and human MWL levels in the four studies adopting virtual scenarios: In two of them (Koppenborg et al., Citation2017 and Rabby et al., Citation2019), results were consistent with those derived from real-world scenarios; in the other two studies (Arntz et al., Citation2020; Müller et al., Citation2017), mental workload levels were lower or unrelated to robot behaviour. Virtual environments may not always replicate the complexities of real-world scenarios, and related results should therefore be interpreted with caution when generalizing to real-world settings (Wijnen et al., 2020; Citation2020). Further investigation is required to fully comprehend the impact of HRC on mental workload in real-world industrial settings.
As concerns the assessment of MWL, the most frequently used objective measure was EDA, characterized by high sensitivity and low intrusiveness. NASA TLX was instead the most common self-report instrument adopted to evaluate the subjective perception of MWL. Despite repeated acknowledgements that only a multimodal approach, including physiological, task-performance, and self-report measures, can adequately capture the complexity of HRC (Cain, Citation2007; Longo et al., Citation2022; Miller, Citation2001), only six of the selected studies adopted this strategy.
As concerns sources of mental workload, the most relevant factors that can negatively impact on both productivity and workers’ mental conditions were patterns of cobot motion and interaction with the human worker, as well as task organization and procedures. However, in two studies (Chacón et al., Citation2021; Fournier et al., Citation2022) collaboration with robots was not associated with an increase in perceived cognitive load. This heterogeneity of findings calls for further investigation; to this purpose, it is important to notice that most of the selected studies were conference proceedings, suggesting that human mental functioning during HRC is still a young and expanding research field (Storm et al., Citation2022).
As for possible solutions to reduce workers’ cognitive load during HRC, five of the selected studies proposed methods to dynamically control cobot actions in response to workers’ mental stress during collaborative tasks. Overall, their authors converged on acknowledging the need for designing cobots sensitive to human mental resources and functioning, equipped with the ability to adjust their behaviour to workers’ psychophysical states through regulation of speed and pace, and variations in task allocation. The current technological advancements, allowing for the continuous assessment of MWL related physiological data through increasingly sensitive and non-invasive sensors, could enable cobots to use information about workers’ mental state as a basis for defining and modulating collaboration patterns.
This scoping review is not exempt from limitations. Despite efforts to make it exhaustive, it is possible that relevant publications were not included because of the selection criteria or involuntary omissions in the screening phase. Another limitation is related to the generalizability of the findings, which were predominantly obtained in simulated laboratory settings from small samples of volunteers, often students or university staff. Finally, at the methodological level the selected studies widely differed in quality, an issue related to the still limited literature available on HRC.
5. Conclusion and future directions
This scoping review summarized the literature investigating cobot and task related factors that may contribute to increase workers’ mental workload, and the potential solutions to address this problem. Cobot motion patterns, speed, and pace, as well as the cobot’s role in task allocation during HRC were associated with higher MWL. These findings have been primarily interpreted through the transactional theory of stress (Lazarus & Folkman, Citation1984), a psychological model derived from the investigation of the interplay between environmental demands and individual resources. It is interesting to notice that most of the studies included in this scoping review were designed and conducted by researchers working in the domain of engineering or robotics, suggesting that multidisciplinary collaboration is not yet the rule in this area of investigation. Moreover, although all the studies were focused on workers’ psychological functioning, only seven papers (30.4%) involved psychologists as co-authors. This lack of interdisciplinary collaboration is a potential risk when dealing with HRC, an intrinsically relational condition jointly involving humans and machines (Dautenhahn, Citation2007; Gervasi et al., Citation2020; Citation2020; Meissner et al., Citation2020; Tsai et al., Citation2022). The involvement of researchers with specific expertise in human psychological functioning and relational needs may help identify the most appropriate methods and measures to investigate such a complex interplay, as well as open novel pathways to explore it, fruitfully integrating the perspective of experts in technology and robotics.
To define the features of a positive and effective human-robot interaction, however, more refined information should be collected from the workers, besides MWL or stress indicators. A promising though still novel area of research in this domain is the real-time repeated assessment of the experience reported by operators during HRC in the factory setting. This emerging area opens new research and intervention avenues, including the implementation of new work patterns, new manufacturing workplaces and new roles for cobots, with the goal of protecting and promoting workers’ mental health. To this purpose, a new type of cobot is currently under development by a multidisciplinary consortium of researchers within the European H2020 “MindBot” project, aimed at designing collaborative robots able to interact with the human operator in ways that promote optimal experiences and foster positive mental health (Nicora et al., Citation2021). The conceptual and empirical model guiding the MindBot project is Flow Theory (Csikszentmihalyi, Citation1975, Citation2000). “Flow” or “optimal experience” is a state of well-being characterized by high concentration, involvement, control of the situation, perception of high stakes and clear goals, positively balanced mood, and perceived intrinsic reward. It is “a state in which people are so involved in an activity that nothing else seems to matter; the experience itself is so enjoyable that people will do it even at a great cost, for the sheer sake of doing it” (Csikszentmihalyi, Citation1990, p. 4). A vast literature highlighted that a key prerequisite for flow onset is the perception of high challenges in the task at hand, matched with adequate personal skills in facing them (for a review, see Delle Fave et al., Citation2011). In the work domain, flow was found to be positively associated with higher work performance (Demerouti, Citation2006) and positive mental functioning (Csikszentmihalyi, Citation1997; Csikszentmihalyi & LeFevre, Citation1989; Fullagar et al., Citation2017; Llorens et al., Citation2013). In HRC settings, fostering the onset of flow experiences based on the challenge/skill balance may promote optimal MWL levels, thus preventing workers’ exposure to mental overload, derived from the perception of challenges exceeding workers’ skills, and mental underload, generated by the perceived lack of significant challenges. By means of their flexibility and adaptability, cobots could be a relevant resource to this aim, as they could become active partners in promoting a functional match between job task challenges and workers’ skills, thus supporting human motivation and work engagement. Cobots can be designed to meet both task demands and worker’s needs, through the tuning of their speed and motion patterns according to workers’ MWL levels, and through enhanced communication features, making HRC a source of optimal experiences. Monitoring a worker’s MWL levels and deviations from optimal mental states in real-time can be used by the cobot as trigger to adopt strategies aimed at achieving a better match between task demands and the worker’s skills.
Over and above technological implementations, projects aimed to endow cobots with features that may facilitate workers’ actions, speed up the pace of work, and promote a better HRC should rely on a multifaceted approach, including industry-specific institutional and regulatory changes, broader policy changes, and workplace organizational efforts (Hammerling, Citation2022). Interdisciplinary support and counselling may be the most appropriate way to create cobot increasingly able to maximise performance and productivity, at the same time respecting and even promoting humans’ mental health.
Almost all the selected physiological data in the industrial context raises ethical concerns regarding privacy and informed consent (McAleenan et al., Citation2019). The disclosure of these data could convey potential benefits, such as the identification and resolution of workers’ health problems before they become more serious; at the same time, however, it could entail the risk of violating workers’ rights to privacy and equal treatment, as this information could be used by employers to make decisions about employee performance or promotions, or to discriminate workers based on their health status (Bernhardt et al., Citation2021). In addition, workers may feel forced to provide their consent to this type of monitoring when, for example, it is presented as a prerequisite for hiring. In order to prevent these problems, workers should get thorough and transparent information about the type of data collected, their use, and the access policy (Bernhardt et al., Citation2023; Tindale et al., Citation2022). The implementation of technologies able to gather and understand physiological and behavioural data from human workers is not enough to promote a better HRC; it is also necessary to define clear policies and guidelines on the use of these data (Wullenkord & Eyssel, Citation2020). Workers should be able to refuse this type of monitoring if they so wish, without negative consequences on their job status; respect for workers’ rights to privacy and informed consent should be granted, in order to properly exploit the benefits of this technology in the workplace (Jacobs et al., Citation2019).
Supplemental Material
Download MS Word (86.7 KB)Acknowledgments
The project leading to this review has received funding from the European Union’s Horizon 2020 research and innovation programme, under grant agreement No 847926 (MindBot: Mental Health promotion of cobot Workers in Industry 4.0).
Disclosure statement
No potential conflict of interest was reported by the authors.
Data availability statement
PRISMA-ScR Checklist.doc.
Additional information
Notes on contributors
Claudia Carissoli
Claudia Carissoli is a Psychologist and Psychotherapist, holding a PhD in Sciences of Education. She is currently undertaking a post-doctoral research role at the Università Cattolica of Milan. Her current research interests centre on the utilization of emerging technologies to enhance the overall and psychological well-being of individuals.
Luca Negri
Luca Negri is a research fellow at the University of Milano. His research interests mainly focus on mental health, psychological resources and well-being indicators, as well as research methodology and psychometrics.
Marta Bassi
Marta Bassi is associate professor of general psychology at the University of Milano, Italy. Her research interests primarily focus on individuals’ quality of experience and well-being in areas such as education, work, leisure and health.
Fabio Alexander Storm
Fabio Alexander Storm is a Biomedical Engineer at IRCCS Medea’s Applied Technologies. He holds a PhD in Mechanical Engineering from the University of Sheffield, specializing in wearable sensors for gait monitoring. Skilled in biomechanical signal processing and clinical trials for medical devices, he's a published author and international journal reviewer.
Antonella Delle Fave
Antonella Delle Fave specialized in Clinical Psychology, is professor of Psychology at the University of Milano, Italy. Her research activities are focused on mental health indicators, flow experience and daily experience fluctuation across life domains and cultures, and among individuals experiencing diversity and adversity conditions.
Notes
1 Statista Research Department. (2021). Collaborative robots’ share of the worldwide industrial robot market 2017-2019. Available at: https://www.statista.com/statistics/897655/cobot-industrial-robot-market-share
References
- Abeliansky, A., & Beulmann, M. (2019). Are they coming for us? Industrial robots and the mental health of workers (cege Discussion Papers, No. 379). University of Göttingen, Center for European, Governance and Economic Development Research (cege).
- Alsuraykh, N. H., Wilson, M. L., Tennent, P., & Sharples, S. (2019). How stress and mental workload are connected [Paper presentation].Proceedings of the 13th EAI international conference on pervasive computing technologies for healthcare, 371–376. https://doi.org/10.1145/3329189.3329235
- Anmarkrud, Ø., Andresen, A., & Bråten, I. (2019). Cognitive load and working memory in multimedia learning: Conceptual and measurement issues. Educational Psychologist, 54(2), 61–83. https://doi.org/10.1080/00461520.2018.1554484
- Arai, T., Kato, R., & Fujita, M. (2010). Assessment of operator stress induced by robot collaboration in assembly. CIRP Annals, 59(1), 5–8. https://doi.org/10.1016/j.cirp.2010.03.043
- Arksey, H., & O’Malley, L. (2005). Scoping studies: Towards a methodological framework. International Journal of Social Research Methodology, 8(1), 19–32. https://doi.org/10.1080/1364557032000119616
- Arntz, A., Eimler, S. C., & Hoppe, H. U. (2020). Augmenting the human-robot communication channel in shared task environments (vol. 12324). Springer Science and Business Media Deutschland GmbH. https://doi.org/10.1007/978-3-030-58157-2_2
- Baltrusch, S., Krause, F., de Vries, A., Dijk, W., & Looze, M. P. (2022). What about the human in human robot collaboration? A literature review on HRC’s effects on aspects of job quality. Ergonomics, 65(5), 719–740. https://doi.org/10.1080/00140139.2021.1984585
- Bernhardt, A., Kresge, L., & Suleiman, R. (2023). The data-driven workplace and the case for worker technology rights. ILR Review, 76(1), 3–29. https://doi.org/10.1177/00197939221131558
- Bernhardt, A., Kresge, L., Suleiman, R. (2021). Data and algorithms at work: The case for worker. UC Berkeley Labor Center. https://policycommons.net/artifacts/2186631/data-and-algorithms-at-work/2942608/
- Bettoni, A., Montini, E., Righi, M., Villani, V., Tsvetanov, R., Borgia, S., Secchi, C., & Carpanzano, E. (2020). Mutualistic and adaptive human-machine collaboration based on machine learning in an injection moulding manufacturing line. Procedia CIRP, 93, 395–400. https://doi.org/10.1016/j.procir.2020.04.119
- Brolin, A., Thorvald, P., & Case, K. (2017). Experimental study of cognitive aspects affecting human performance in manual assembly. Production & Manufacturing Research, 5(1), 141–163. https://doi.org/10.1080/21693277.2017.1374893
- Brun, L., & Wioland, L. (2021). Prevention of occupational risks related to the human-robot collaboration (vol. 1253). Springer. https://doi.org/10.1007/978-3-030-55307-4_67
- Butmee, T., Lansdown, T., & Walker, G. (2019). Mental workload and performance measurements in driving task: A review literature. Transport Ergonomics and Human Factors (TEHF), Aerospace Human Factors and Ergonomics, VI, 286–294. https://doi.org/10.1007/978-3-319-96074-6_31
- Cain, B. (2007). A Review of the Mental Workload Literature. https://apps.dtic.mil/sti/citations/ADA474193
- Carayon, P., Smith, M. J., & Haims, M. C. (1999). Work organization, job stress, and work-related musculoskeletal disorders. Human Factors, 41(4), 644–663. https://doi.org/10.1518/001872099779656743
- Castillo, J. M., Galy, E., & Thérouanne, P. (2021). Étude de la charge mentale et du stress généré par l’usage du numérique dans le milieu professionnel. Comité D’organisation Des Doctoriales Comité De Lecture, 4.
- Chacón, A., Ponsa, P., & Angulo, C. (2021). Cognitive interaction analysis in human–robot collaboration using an assembly task. Electronics, 10(11), 1317. https://doi.org/10.3390/electronics10111317
- Chan, S. F., & Greca, A. M. L. (2013). Perceived stress scale (PSS). In Encyclopedia of behavioral medicine (pp. 1454–1455). https://doi.org/10.1007/978-1-4419-1005-9_773
- Chen, J. Y. C., Barnes, M. J., Selkowitz, A. R., & Stowers, K. (2016). Effects of agent transparency on human-autonomy teaming effectiveness [Paper presentation].2016 IEEE international conference ON systems, Man, AND Cybernetics (Smc), 1838–1843. https://doi.org/10.1109/SMC.2016.7844505
- Cohen, S. (1994). Perceived stress scale.
- Cohen, S., Kessler, R. C., & Gordon, L. U. (1997). Measuring stress: A guide for health and social scientists. Oxford University Press.
- Corujeira, J., Silva, J. L., & Ventura, R. (2017). Effects of haptic feedback in dual-task teleoperation of a mobile robot. In R. Bernhaupt, G. Dalvi, A. Joshi, D. K. Balkrishan, J. O’Neill, & M. Winckler (Eds.), Lecture Notes in Computer Science (including subseries Lecture Notes in Artificial Intelligence and Lecture Notes in Bioinformatics) (pp. 267–286). Springer. https://doi.org/10.1007/978-3-319-67687-6_18
- Csikszentmihalyi, M. (1975). Beyond boredom and anxiety. The experience of play in work and games. https://psycnet.apa.org/record/2000-12701-000
- Csikszentmihalyi, M. (1990). Flow. The psychology of optimal experience. New York (HarperPerennial) 1990. HarperCollins. https://opus4.kobv.de/opus4-Fromm/frontdoor/index/index/docId/27641
- Csikszentmihalyi, M. (1997). Finding flow: The psychology of engagement with everyday life. http://psycnet.apa.org/record/1997-08434-000
- Csikszentmihalyi, M. (2000). Beyond boredom and anxiety. Jossey-bass.
- Csikszentmihalyi, M., & LeFevre, J. (1989). Optimal experience in work and leisure. Journal of Personality and Social Psychology, 56(5), 815–822. https://doi.org/10.1037/0022-3514.56.5.815
- Darvishmotevali, M., & Ali, F. (2020). Job insecurity, subjective well-being and job performance: The moderating role of psychological capital. International Journal of Hospitality Management, 87, 102462. https://doi.org/10.1016/j.ijhm.2020.102462
- Dautenhahn, K. (2007). Socially intelligent robots: Dimensions of human–robot interaction. Philosophical Transactions of the Royal Society of London. Series B, Biological Sciences, 362(1480), 679–704. https://doi.org/10.1098/rstb.2006.2004
- De Rivecourt, M., Kuperus, M. N., Post, W. J., & Mulder, L. J. M. (2008). Cardiovascular and eye activity measures as indices for momentary changes in mental effort during simulated flight. Ergonomics, 51(9), 1295–1319. https://doi.org/10.1080/00140130802120267
- De Simone, Valentina, V. D., Di Pasquale, V. D., Giubileo, V., & Miranda, S. (2022). Human-robot collaboration: An analysis of worker’s performance. Procedia Computer Science, 200, 1540–1549. https://doi.org/10.1016/j.procs.2022.01.355
- Delle Fave, A., Massimini, F., & Bassi, M. (2011). Psychological selection and optimal experience across cultures: social empowerment through personal growth. Springer Science & Business Media.
- Delliaux, S., Delaforge, A., Deharo, J.-C., & Chaumet, G. (2019). Mental workload alters heart rate variability, lowering non-linear dynamics. Frontiers in Physiology, 10, 565. https://doi.org/10.3389/fphys.2019.00565
- Demerouti, E. (2006). Job characteristics, flow, and performance: The moderating role of conscientiousness. Journal of Occupational Health Psychology, 11(3), 266–280. https://doi.org/10.1037/1076-8998.11.3.266
- Demerouti, E., Hewett, R., Haun, V., De Gieter, S., Rodríguez-Sánchez, A., & Skakon, J. (2020). From job crafting to home crafting: A daily diary study among six European countries. Human Relations, 73(7), 1010–1035. https://doi.org/10.1177/0018726719848809
- Etzi, R., Huang, S., Scurati, G. W., Lyu, S., Ferrise, F., Gallace, A., Gaggioli, A., Chirico, A., Carulli, M., & Bordegoni, M. (2020). Using virtual reality to test human-robot interaction during a collaborative task [Paper presentation]. Proceedings OF THE asme international design engineering technical conferences AND computers AND information IN engineering conference, 2019, Vol 1, 1–8. https://doi.org/10.1115/DETC2019-97415
- European Agency for Safety and Health at Work (EU-OSHA). (2013). European opinion poll on occupational safety and health (p. 83). Publications Office of the European Union. https://osha.europa.eu/sites/default/files/safety-health-in-figures/eu-poll-press-kit-2013.pdf
- EU-OSHA. (2015). Second European survey of enterprises on new and emerging risks (ESENER-2). Publications Office of the European Union Luxembourg. https://op.europa.eu/s/xmNU
- Faccio, M., Granata, I., Menini, A., Milanese, M., Rossato, C., Bottin, M., Minto, R., Pluchino, P., Gamberini, L., Boschetti, G., & Rosati, G. (2023). Human factors in cobot era: A review of modern production systems features. Journal of Intelligent Manufacturing, 34(1), 85–106. https://doi.org/10.1007/s10845-022-01953-w
- Fallahi, M., Motamedzade, M., Heidarimoghadam, R., Soltanian, A. R., & Miyake, S. (2016). Effects of mental workload on physiological and subjective responses during traffic density monitoring: A field study. Applied Ergonomics, 52, 95–103. https://doi.org/10.1016/j.apergo.2015.07.009
- Fletcher, S. R., & Webb, P. (2017). Industrial robot ethics: The challenges of closer human collaboration in future manufacturing systems. In Intelligent systems, control and automation (vol. 84, pp. 159–169). https://doi.org/10.1007/978-3-319-46667-5_12
- Fournier, É., Kilgus, D., Landry, A., Hmedan, B., Pellier, D., Fiorino, H., & Jeoffrion, C. (2022). The impacts of human-cobot collaboration on perceived cognitive load and usability during an industrial task: An exploratory experiment. IISE Transactions on Occupational Ergonomics and Human Factors, 10(2), 83–90. https://doi.org/10.1080/24725838.2022.2072021
- Fujita, M., Kato, R., & Tamio, A. (2010). Assessment of operators’ mental strain induced by hand-over motion of industrial robot manipulator [Paper presentation]. Proceedings - IEEE international workshop on robot and human interactive communication, 361–366. https://doi.org/10.1109/ROMAN.2010.5598689
- Fullagar, C., & Delle Fave, A. (Eds.). (2017). Flow at Work: Measurement and Implications (1st ed.). Routledge. https://doi.org/10.4324/9781315871585
- Gaab, J. (2009). PASA – Primary appraisal secondary appraisal—Ein Fragebogen zur Erfassung von situations-bezogenen kognitiven Bewertungen. Verhaltenstherapie, 19(2), 114–115. https://doi.org/10.1159/000223610
- Gaillard, A. W. (1993). Comparing the concepts of mental load and stress. Ergonomics, 36(9), 991–1005. https://doi.org/10.1080/00140139308967972
- Gaillard, A. W. K. (2001). Stress, workload, and fatigue as three biobehavioral states: A general overview. In Stress, workload, and fatigue (pp. 623–639). Lawrence Erlbaum Associates Publishers.
- Gaillard, A. W. K., & Wientjes, C. J. E. (1994). Mental load and work stress as two types of energy mobilization. Work & Stress, 8(2), 141–152. https://doi.org/10.1080/02678379408259986
- Gervasi, R., Digiaro, F. N., Mastrogiacomo, L., Maisano, D. A., & Franceschini, F. (2020). Comparing quality profiles in human-robot collaboration: Empirical evidence in the automotive sector (pp. 79–104). Universidade do Minho. https://www.scopus.com/inward/record.uri?eid=2-s2.0-85093842708&partnerID=40&md5=74b8bba40739bf784c45ab644c1e8704
- Gervasi, R., Mastrogiacomo, L., & Franceschini, F. (2020). A conceptual framework to evaluate human-robot collaboration. The International Journal of Advanced Manufacturing Technology, 108(3), 841–865. https://doi.org/10.1007/s00170-020-05363-1
- Gjoreski, M., Luštrek, M., Gams, M., & Gjoreski, H. (2017). Monitoring stress with a wrist device using context. Journal of Biomedical Informatics, 73, 159–170. https://doi.org/10.1016/j.jbi.2017.08.006
- González-Muñoz, E. L., & Gutiérrez-Martínez, R. E. (2007). Contribution of mental workload to job stress in industrial workers. Work (Reading, Mass), 28(4), 355–361.
- Hammerling, J. H. (2022). Technological change in five industries: Threats to jobs, wages, and working conditions.
- Hart, S. G. (2006). NASA-task load index (NASA-TLX); 20 years later. Proceedings of the Human Factors and Ergonomics Society Annual Meeting, 50(9), 904–908. https://doi.org/10.1177/154193120605000909
- Hart, S. G., & Staveland, L. E. (1988). Development of NASA-TLX (task load index): Results of empirical and theoretical research. Advances in Psychology, 52(2), 139–183. https://doi.org/10.1016/S0166-4115(08)62386-9
- Helton, W. S. (2004). Validation of a short stress state questionnaire. Proceedings of the Human Factors and Ergonomics Society Annual Meeting, 48(11), 1238–1242. https://doi.org/10.1177/154193120404801107
- Hidalgo-Muñoz, A. R., Mouratille, D., Matton, N., Causse, M., Rouillard, Y., & El-Yagoubi, R. (2018). Cardiovascular correlates of emotional state, cognitive workload and time-on-task effect during a realistic flight simulation. International Journal of Psychophysiology : official Journal of the International Organization of Psychophysiology, 128, 62–69. https://doi.org/10.1016/j.ijpsycho.2018.04.002
- Hjortskov, N., Rissén, D., Blangsted, A. K., Fallentin, N., Lundberg, U., & Søgaard, K. (2004). The effect of mental stress on heart rate variability and blood pressure during computer work. European Journal of Applied Physiology, 92(1-2), 84–89. https://doi.org/10.1007/s00421-004-1055-z
- Holm, A. (2010). Developing neurophysiological metrics for the assessment of mental workload and the functional state of the brain. Aalto-yliopiston teknillinen korkeakoulu. https://aaltodoc.aalto.fi:443/handle/123456789/4769
- Holm, A., Lukander, K., Korpela, J., Sallinen, M., & Müller, K. M. I. (2009). Estimating brain load from the EEG. TheScientificWorldJournal, 9, 639–651. https://doi.org/10.1100/tsw.2009.83
- Hopko, S. K., Khurana, R., Mehta, R. K., & Pagilla, P. R. (2021). Effect of cognitive fatigue, operator sex, and robot assistance on task performance metrics, workload, and situation awareness in human-robot collaboration. IEEE Robotics and Automation Letters, 6(2), 3049–3056. https://doi.org/10.1109/LRA.2021.3062787
- Hopko, S., Wang, J., & Mehta, R. (2022). Human factors considerations and metrics in shared space human-robot collaboration: A systematic review. Frontiers in Robotics and AI, 9, 799522. https://doi.org/10.3389/frobt.2022.799522
- Hou, X., Liu, Y., Sourina, O., Tan, Y. R. E., Wang, L., & Mueller-Wittig, W. (2015). EEG based stress monitoring [Paper presentation]. 2015 IEEE international conference on systems, man, and cybernetics, 3110–3115. https://doi.org/10.1109/SMC.2015.540
- International Organization for Standardization. (2016). ISO/TS 15066:2016—Robots and robotic devices—Collaborative robots. ISO. https://www.iso.org/obp/ui/#iso:std:iso:ts:15066:ed-1:v1:en
- ISO. (2017). 10075-1: Ergonomic principles related to mental workload–Part 1: General issues and concepts, terms and definitions. CEN.
- Iwasaki, Y., Navarro, B., Iwata, H., & Ganesh, G. (2022). Embodiment modifies attention allotment for the benefit of dual task performance. Communications Biology, 5(1), 1. https://doi.org/10.1038/s42003-022-03603-6
- Jacobs, J. V., Hettinger, L. J., Huang, Y.-H., Jeffries, S., Lesch, M. F., Simmons, L. A., Verma, S. K., & Willetts, J. L. (2019). Employee acceptance of wearable technology in the workplace. Applied Ergonomics, 78, 148–156. https://doi.org/10.1016/j.apergo.2019.03.003
- Kantowitz, B. H. (1987). 3. Mental workload. In P. A. Hancock (Ed.), Advances in psychology (vol. 47, pp. 81–121). https://doi.org/10.1016/S0166-4115(08)62307-9
- Kato, R., Fujita, M., & Arai, T. (2010). Development of advanced cellular manufacturing system with human-robot collaboration-assessment of mental strain on human operators induced by the assembly support [Paper presentation]. Proceedings - IEEE international workshop on robot and human interactive communication, 355–360. https://doi.org/10.1109/ROMAN.2010.5598700
- Kolbeinsson, A., Thorvald, P., & Lindblom, J. (2017). Coordinating the interruption of assembly workers in manufacturing. Applied Ergonomics, 58, 361–371. https://doi.org/10.1016/j.apergo.2016.07.015
- Koppenborg, M., Nickel, P., Naber, B., Lungfiel, A., & Huelke, M. (2017). Effects of movement speed and predictability in human–robot collaboration. Human Factors and Ergonomics in Manufacturing & Service Industries, 27(4), 197–209. https://doi.org/10.1002/hfm.20703
- Körner, U., Müller‐Thur, K., Lunau, T., Dragano, N., Angerer, P., & Buchner, A. (2019). Perceived stress in human–machine interaction in modern manufacturing environments—Results of a qualitative interview study. Stress and Health, 35(2), 187–199. https://doi.org/10.1002/smi.2853
- Lagomarsino, M., Lorenzini, M., Balatti, P., Momi, E. D., & Ajoudani, A. (2022). Pick the right co-worker: Online assessment of cognitive ergonomics in human-robot collaborative assembly. IEEE Transactions on Cognitive and Developmental Systems, 1–1. https://doi.org/10.1109/TCDS.2022.3182811
- Lazarus, R. S., & Folkman, S. (1984). Stress, appraisal, and coping. Springer Publishing Company.
- Levac, D., Colquhoun, H., & O'Brien, K. K. (2010). Scoping studies: Advancing the methodology. Implementation Science, 5(1), 69. https://doi.org/10.1186/1748-5908-5-69
- Li, W., Li, R., Xie, X., & Chang, Y. (2022). Evaluating mental workload during multitasking in simulated flight. Brain and Behavior, 12(4), e2489. https://doi.org/10.1002/brb3.2489
- Litzenberger, G. (2019). IFR publishes collaborative industrial robot definition and estimates supply. International Federation of Robotics [Online].
- Llorens, S., Salanova, M., & Rodriguez, A. M. (2013). How is flow experienced and by whom? Testing flow among occupations. Stress and Health : journal of the International Society for the Investigation of Stress, 29(2), 125–137. https://doi.org/10.1002/smi.2436
- Longo, L. (2015). A defeasible reasoning framework for human mental workload representation and assessment. Behaviour & Information Technology, 34(8), 758–786. https://doi.org/10.1080/0144929X.2015.1015166
- Longo, L., Wickens, C. D., Hancock, G., & Hancock, P. A. (2022). Human Mental Workload: A Survey and a Novel Inclusive Definition. Frontiers in Psychology, 13, 883321. https://doi.org/10.3389/fpsyg.2022.883321
- Lorenzini, M., Lagomarsino, M., Fortini, L., Gholami, S., & Ajoudani, A. (2023). Ergonomic human-robot collaboration in industry: A review. Frontiers in Robotics and AI, 9, 262.
- Lu, L., Xie, Z., Wang, H., Li, L., & Xu, X. (2022). Mental stress and safety awareness during human-robot collaboration—Review. Applied Ergonomics, 105, 103832. https://doi.org/10.1016/j.apergo.2022.103832
- Macdonald, W. (2003). The impact of job demands and workload on stress and fatigue. Australian Psychologist, 38(2), 102–117. https://doi.org/10.1080/00050060310001707107
- Matthews, G., Zeidner, M., Roberts, R. D. (2002). Emotional intelligence: Science and myth. MIT Press. https://books.google.it/books?hl=it&lr=&id=Fy9gXBgREtQC&oi=fnd&pg=PR11&dq=Emotional+Intelligence+Science+and+Myth&ots=lskQqRlGMC&sig=8sB8tgBWz5-beywGlGmgWM2pmCA#v=onepage&q=EmotionalIntelligence Science and Myth&f=false
- Maurtua, I., Fernandez, I., Kildal, J., Susperregi, L., Tellaeche, A., & Ibarguren, A. (2016). Enhancing safe human-robot collaboration through natural multimodal communication [Paper presentation]. IEEE international conference on emerging technologies and factory automation, ETFA, 2016-Novem. https://doi.org/10.1109/ETFA.2016.7733573
- McAleenan, P., McAleenan, C., Ayers, G., Behm, M., & Beachem, Z. (2019). The ethics deficit in occupational safety and health monitoring technologies. Proceedings of the Institution of Civil Engineers - Management, Procurement and Law, 172(3), 93–100. https://doi.org/10.1680/jmapl.18.00027
- Meissner, A., Trübswetter, A., Conti-Kufner, A. S., & Schmidtler, J. (2020). Friend or foe understanding assembly workers’ acceptance of human-robot collaboration. ACM Transactions on Human-Robot Interaction, 10(1), 1–30. https://doi.org/10.1145/3399433
- Messeri, C., Masotti, G., Zanchettin, A. M., & Rocco, P. (2021). Human-robot collaboration: optimizing stress and productivity based on game theory. IEEE Robotics and Automation Letters, 6(4), 8061–8068. https://doi.org/10.1109/LRA.2021.3102309
- Messeri, C., Zanchettin, A. M., Rocco, P., Gianotti, E., Chirico, A., Magoni, S., & Gaggioli, A. (2023). On the effects of leader-follower roles in dyadic human-robot synchronisation. IEEE Transactions on Cognitive and Developmental Systems, 15(2), 434–443. https://doi.org/10.1109/TCDS.2020.2991864
- Michaelis, J. E., Siebert-Evenstone, A., Shaffer, D. W., & Mutlu, B. (2020). Collaborative or simply uncaged? Understanding human-cobot interactions in automation [Paper presentation]. Conference on human factors in computing systems - proceedings, 1–12. https://doi.org/10.1145/3313831.3376547
- Midha, S., Wilson, M. L., & Sharples, S. (2022). Lived experiences of mental workload in everyday life [Paper presentation]. CHI conference on human factors in computing systems, 1–16. https://doi.org/10.1145/3491102.3517690
- Miller, S. (2001). Workload measures. National advanced driving simulator. http://www.nads-sc.uiowa.edu/publicationstorage/200501251347060.n01-006.pdf
- Minowa, H. (2000). The workload of computer system engineers and mental health. Sangyo Eiseigaku Zasshi = Journal of Occupational Health, 42(1), 17–23. https://doi.org/10.1539/sangyoeisei.kj00002552186
- Mital, A., & Pennathur, A. (2004). Advanced technologies and humans in manufacturing workplaces: An interdependent relationship. International Journal of Industrial Ergonomics, 33(4), 295–313. https://doi.org/10.1016/j.ergon.2003.10.002
- Morton, J., Vanneste, P., Larmuseau, C., Van Acker, B., Raes, A., Bombeke, K., Cornillie, F., Saldien, J., & De Marez, L. (2019). Identifying predictive EEG features for cognitive overload detection in assembly workers in Industry 4.0. Human mental workload: Models and applications: Third international symposium, H-WORKLOAD 2019., November 14–15, 2019, Proceedings. 3rd international symposium on human mental workload: models and applications (H-WORKLOAD). http://hdl.handle.net/1854/LU-8629814
- Müller, S. L., Stiehm, S., Jeschke, S., & Richert, A. (2017). Subjective stress in hybrid collaboration. In Kheddar, A., Yoshida, E., Ge, SS., Suzuki, K., Cabibihan, J. J., Eyssel, F., and He, H. (Ed.), Social robotics, ICSR 2017. (vol. 10652, pp. 597–606). Springer International Publishing AG. https://doi.org/10.1007/978-3-319-70022-9_59
- Nenna, F., Orso, V., Zanardi, D., & Gamberini, L. (2023). The virtualization of human–robot interactions: A user-centric workload assessment. Virtual Reality, 27(2), 553–571. https://doi.org/10.1007/s10055-022-00667-x
- Nicora, M. L., André, E., Berkmans, D., Carissoli, C., D’Orazio, T., Delle Fave, A., … Malosio, M. (2021). A human-driven control architecture for promoting good mental health in collaborative robot scenarios [Paper presentation]. 2021 30th IEEE international conference on robot & human interactive communication (RO-MAN) (pp. 285–291). IEEE. https://doi.org/10.1109/RO-MAN50785.2021.9515315
- Niculescu, A. I., Cao, Y., Nijholt, A. (2009). Stress and cognitive load in multimodal conversational interactions. HCI international. 13th international conference on human-computer interaction, 891–895. https://research.utwente.nl/en/publications/stress-and-cognitive-load-in-multimodal-conversational-interactio
- Panchetti, T., Pietrantoni, L., Puzzo, G., Gualtieri, L., & Fraboni, F. (2023). Assessing the relationship between cognitive workload, workstation design, user acceptance and trust in collaborative robots. Applied Sciences, 13(3), 1720. https://doi.org/10.3390/app13031720
- Pande, D. T. (1992). Stress and mental workload: A study in an industrial organisation (IIMA working paper No. WP1992-05-01_01099). Indian Institute of Management Ahmedabad. Research and Publication Department. https://econpapers.repec.org/paper/iimiimawp/wp01099.htm
- Parent-Thirion, A., Fernández-Macías, E., Hurley, J., & Vermeylen, G. (2007). Fourth European working conditions survey.
- Parmentier, D. D., Van Acker, B. B., Detand, J., & Saldien, J. (2020). Design for assembly meaning: A framework for designers to design products that support operator cognition during the assembly process. Cognition, Technology & Work, 22(3), 615–632. https://doi.org/10.1007/s10111-019-00588-x
- Peeters, M. C. W., & Plomp, J. (2022). For better or for worse: The impact of workplace automation on work characteristics and employee well-being. In Digital transformation [working title]. IntechOpen. https://doi.org/10.5772/intechopen.102980
- Pollak, A., Paliga, M., Pulopulos, M. M., Kozusznik, B., & Kozusznik, M. W. (2020). Stress in manual and autonomous modes of collaboration with a cobot. Computers in Human Behavior, 112, 106469. https://doi.org/10.1016/j.chb.2020.106469
- Publications Office of the European Union. (2013). European agency for safety and health at work – EU-OSHA. European Opinion Poll on Occupational Safety and Health (p. 83). Publications Office of the European Union. https://osha.europa.eu/sites/default/files/safety-health-in-figures/eu-poll-press-kit-2013.pdf
- Rabby, K. M., Khan, M., Karimoddini, A., & Jiang, S. X. (2019). An effective model for human cognitive performance within a human-robot collaboration framework [Paper presentation]. Conference proceedings - IEEE international conference on systems, man and cybernetics, 2019-Octob, 3872–3877. https://doi.org/10.1109/SMC.2019.8914536
- Rahman, S., & Wang, Y. (2015). Dynamic affection-based motion control of a humanoid robot to collaborate with human in flexible assembly in manufacturing [Paper presentation].ASME 2015 dynamic systems and control conference, DSCC 2015, 3 (October 2015). https://doi.org/10.1115/DSCC2015-9841
- Rajavenkatanarayanan, A., Nambiappan, H. R., Kyrarini, M., & Makedon, F. (2020). Towards a real-time cognitive load assessment system for industrial human-robot cooperation [Paper presentation]. 2020 29th IEEE international conference ON robot AND human interactive communication (Ro-Man), 698–705. https://doi.org/10.1109/RO-MAN47096.2020.9223531
- Rial-Gonzalez, E., Cockburn, W., & Irastorza, X. (2010). European Survey of Enterprises on New and Emerging Risks (ESENER): How is occupational safety and health managed in European workplaces? PsycEXTRA Dataset. https://doi.org/10.1037/e572992012-015
- Robelski, S., & Wischniewski, S. (2016). Scoping review on human-machine interaction and health and safety at work. In Lecture Notes in computer science (including subseries lecture notes in artificial intelligence and lecture notes in bioinformatics) (vol. 9752, pp. 337–347). https://doi.org/10.1007/978-3-319-39399-5_32
- Robelski, S., & Wischniewski, S. (2018). Human-machine interaction and health at work: A scoping review. International Journal of Human Factors and Ergonomics, 5(2), 93–110. https://doi.org/10.1504/IJHFE.2018.092226
- Roncone, A., Mangin, O., & Scassellati, B. (2017). Transparent role assignment and task allocation in human robot collaboration [Paper presentation]. Proceedings - IEEE international conference on robotics and automation, 1014–1021. https://doi.org/10.1109/ICRA.2017.7989122
- Roschelle, J., & Teasley, S. D. (1995). The construction of shared knowledge in collaborative problem solving. In Computer supported collaborative learning (pp. 69–97). Springer Berlin Heidelberg. https://doi.org/10.1007/978-3-642-85098-1_5
- Sato, Y., Miyake, H., & Thériault, G. (2009). Overtime work and stress response in a group of Japanese workers. Occupational Medicine (Oxford, England), 59(1), 14–19. https://doi.org/10.1093/occmed/kqn141
- Sauppé, A., Mutlu, B., Sauppe, A., & Mutlu, B. (2015). The social impact of a robot co-worker in industrial settings [Paper presentation]. Chi 2015: Proceedings OF THE 33rd annual chi conference ON human factors IN computing systems, 2015, 3613–3622. https://doi.org/10.1145/2702123.2702181
- Schmidtler, J., Knott, V., Hölzel, C., & Bengler, K. (2015). Human centered assistance applications for the working environment of the future. Occupational Ergonomics, 12(3), 83–95. https://doi.org/10.3233/OER-150226
- Segura Parra, P., Lobato Calleros, O., & Ramirez-Serrano, A. (2020). Human-robot collaboration systems: Components and applications [Paper presentation]. The 7th international conference of control, dynamic systems, and robotics. https://doi.org/10.11159/cdsr20.150
- Shao, S., Wang, T., Wang, Y., Su, Y., Song, C., & Yao, C. (2020). Research of HRV as a measure of mental workload in human and dual-arm robot interaction. Electronics, 9(12), 2174. https://doi.org/10.3390/electronics9122174
- Smids, J., Nyholm, S., & Berkers, H. (2020). Robots in the workplace: A threat to—Or opportunity for—Meaningful work? Philosophy & Technology, 33(3), 503–522. https://doi.org/10.1007/s13347-019-00377-4
- Storm, F. A., Chiappini, M., Dei, C., Piazza, C., André, E., Reißner, N., Brdar, I., Delle Fave, A., Gebhard, P., Malosio, M., Peña Fernández, A., Štefok, S., & Reni, G. (2022). Physical and mental well-being of cobot workers: A scoping review using the software-hardware-environment-liveware-liveware-organization model. Human Factors and Ergonomics in Manufacturing & Service Industries, 32(5), 419–435. https://doi.org/10.1002/hfm.20952
- Sweller, J. (1988). Cognitive load during problem solving: Effects on learning. Cognitive Science, 12(2), 257–285. https://doi.org/10.1016/0364-0213(88)90023-7
- Sweller, J. (1994). Cognitive load theory, learning difficulty, and instructional design. Learning and Instruction, 4(4), 295–312. https://doi.org/10.1016/0959-4752(94)90003-5
- Sweller, J., van Merrienboer, J. J. G., & Paas, F. G. W. C. (1998). Cognitive architecture and instructional design. Educational Psychology Review, 10(3), 251–296. https://doi.org/10.1023/A:1022193728205
- Szalma, J. L., & Taylor, G. S. (2011). Individual differences in response to automation: The five factor model of personality. Journal of Experimental Psychology. Applied, 17(2), 71–96. https://doi.org/10.1037/a0024170
- Tan, J. T. C., Duan, F., Zhang, Y., Watanabe, K., Kato, R., & Arai, T. (2009). Human-robot collaboration in cellular manufacturing: Design and development [Paper presentation]. 2009 IEEE/RSJ International conference on intelligent robots and systems, IROS 2009, 29–34. https://doi.org/10.1109/IROS.2009.5354155
- Tindale, L. C., Chiu, D., Minielly, N., Hrincu, V., Talhouk, A., & Illes, J. (2022). Wearable biosensors in the workplace: Perceptions and perspectives. Frontiers in Digital Health, 4, 800367. https://doi.org/10.3389/fdgth.2022.800367
- Tricco, A. C., Lillie, E., Zarin, W., O'Brien, K. K., Colquhoun, H., Levac, D., Moher, D., Peters, M. D. J., Horsley, T., Weeks, L., Hempel, S., Akl, E. A., Chang, C., McGowan, J., Stewart, L., Hartling, L., Aldcroft, A., Wilson, M. G., Garritty, C., … Straus, S. E. (2018). PRISMA extension for scoping reviews (PRISMA-ScR): Checklist and explanation. Annals of Internal Medicine, 169(7), 467–473. https://doi.org/10.7326/M18-0850
- Tsai, C.-Y., Marshall, J. D., Choudhury, A., Serban, A., Tsung-Yu Hou, Y., Jung, M. F., Dionne, S. D., & Yammarino, F. J. (2022). Human-robot collaboration: A multilevel and integrated leadership framework. The Leadership Quarterly, 33(1), 101594. https://doi.org/10.1016/j.leaqua.2021.101594
- Ustunel, Z., & Gunduz, T. (2017). Human-robot collaboration on an assembly work with extended cognition approach. Journal of Advanced Mechanical Design, Systems, and Manufacturing, 11(5), JAMDSM0057. https://doi.org/10.1299/jamdsm.2017jamdsm0057
- Van Acker, B. B., Parmentier, D. D., Vlerick, P., & Saldien, J. (2018). Understanding mental workload: From a clarifying concept analysis toward an implementable framework. Cognition, Technology & Work, 20(3), 351–365. https://doi.org/10.1007/s10111-018-0481-3
- Wallace, J. (2021). Getting collaborative robots to work: A study of ethics emerging during the implementation of cobots. Paladyn, Journal of Behavioral Robotics, 12(1), 299–309. https://doi.org/10.1515/pjbr-2021-0019
- Wang, X. V., Seira, A., & Wang, L. (2018). Classification, personalised safety framework and strategy for human-robot collaboration [Paper presentation]. Proceedings of international conference on computers and industrial engineering, CIE, 2018-Decem. https://www.scopus.com/inward/record.uri?eid=2-s2.0-85061345176&partnerID=40&md5=d35c4fc39b3988eabc4a833f26f2c19c
- Wang, Z., Yang, L., & Ding, J. (2005). Application of heart rate variability in evaluation of mental workload. Zhonghua Lao Dong Wei Sheng Zhi Ye Bing Za Zhi = Zhonghua Laodong Weisheng Zhiyebing Zazhi = Chinese Journal of Industrial Hygiene and Occupational Diseases, 23(3), 182–184.
- Warm, S. J., Matthews, G., & Finomore, V. (2008). Vigilance, workload, and stress (pp. 115–141). Performance Under Stress.
- Welfare, K. S., Hallowell, M. R., Shah, J. A., & Riek, L. D. (2019). Consider the human work experience when integrating robotics in the workplace [Paper presentation]. ACM/IEEE international conference on human-robot interaction, 2019 75–84. https://doi.org/10.1109/HRI.2019.8673139
- Wickens, C. D., Gordon, S. E., & Liu, Y. (1998). An introduction to human factors engineering. Longman.
- Wierwille, W. W., Rahimi, M., & Casali, J. G. (1985). Evaluation of 16 measures of mental workload using a simulated flight task emphasizing mediational activity. Human Factors, 27(5), 489–502. https://doi.org/10.1177/001872088502700501
- Wijnen, L., Bremner, P., Lemaignan, S., & Giuliani, M. (2020). Performing human-robot interaction user studies in virtual reality [Paper presentation]. 2020 29th IEEE international conference on robot and human interactive communication (RO-MAN), 794–794. https://doi.org/10.1109/RO-MAN47096.2020.9223521
- Wijnen, L., Lemaignan, S., & Bremner, P. (2020). Towards using virtual reality for replicating HRI studies [Paper presentation]. Companion of the 2020 ACM/IEEE international conference on human-robot interaction, 514–516. https://doi.org/10.1145/3371382.3378374
- Wilson, J. R., & Sharples, S. (2015). Evaluation of Human Work. CRC Press.
- Wixted, F., & O’Sullivan, L. (2014). The effect of automated manufacturing environments on employee health. Proceedings of the Irish Ergonomics Society Annual Conference, 1, 80–91. Retrieved from https://ihfes.org/wp-content/uploads/2020/03/IESConferenceReview2014Volume1.pdf
- Woods, D. D. (1996). Decomposing automation: Apparent simplicity, real complexity. In Automation and Human Performance. CRC Press.
- Wullenkord, R., & Eyssel, F. (2020). Societal and ethical issues in HRI. Current Robotics Reports, 1(3), 85–96. https://doi.org/10.1007/s43154-020-00010-9
- Young, M. S., Brookhuis, K. A., Wickens, C. D., & Hancock, P. A. (2015). State of science: Mental workload in ergonomics. Ergonomics, 58(1), 1–17. https://doi.org/10.1080/00140139.2014.956151
- Zanchettin, A. M., Croft, E., Ding, H., & Li, M. (2018). Collaborative robots in the workplace. IEEE Robotics & Automation Magazine, 25(2), 16–17. https://doi.org/10.1109/MRA.2018.2822083
- Zhao, F., Henrichs, C., & Mutlu, B. (2020, August). Task interdependence in human-robot teaming. In 2020 29th IEEE International Conference on Robot and Human Interactive Communication (RO-MAN) (pp. 1143–1149). IEEE.