
Abstract
The study investigated the interrelationships between the UTAUT2 (Unified Theory of Acceptance and Use of Technology) constructs predicting intentions to use driverless automated shuttles. Survey data was gathered from individuals physically experiencing an automated shuttle in a mixed traffic environment on public roads in Trikala (Greece) as part of the CityMobil2 project. Structural equation modelling showed that intentions to use automated shuttles were most strongly driven by hedonic motivation, followed by performance expectancy and social influence. Performance expectancy mediated the relationship between effort expectancy and behavioural intention. This means that people's expectations of how difficult automated shuttles will be to use and their intentions to use them can be explained through their expectations around how these vehicles will perform. Technology savviness was a negative moderator of the relationship between social influence and performance expectancy and facilitating conditions, respectively. Tech-savvy individuals rely less on their social networks to nurture their beliefs that automated shuttles are useful and to have the necessary resources to use automated shuttles. Car use was a negative predictor of the intention to use automated shuttles. Future research should revisit the interrelationships between the UTAUT2 constructs and apply (quasi-) experimental studies to unravel the temporal interaction between constructs.Relevance to human factors/Relevance to ergonomics theoryThe study investigated the interrelationships between the UTAUT2 (Unified Theory of Acceptance and Use of Technology) constructs predicting intentions to use driverless automated shuttles. Survey data from individuals physically experiencing an automated shuttle in Trikala (Greece) as part of the CityMobil2 project was analysed by structural equation modeling. Examining the interrelationships between the UTAUT2 constructs enables us to identify underlying beliefs and devise adequate strategies to promote automated vehicle acceptance.
Supplemental data for this article is available online at https://doi.org/10.1080/1463922X.2020.1814446.
1. Introduction
The debate on how to reduce car ownership and car use has been ongoing for at least four decades (Cullinane Citation2002). Governmental policies to encourage the use of public transport tend to yield marginal and temporary reductions in private car use, and often lead to car redistribution rather than reductions in car traffic, congestion and environmental pollution (Cullinane Citation2002; Younes Citation1995). Hensher (Citation1998, 193) asserted that “no public transport system within affordable political budgets is ever likely to provide a level of service of sufficient appeal to attract a large number of car users to switch to public transport”. The advent of automated shuttles as feeders to public transport systems could instigate a paradigm shift towards more environmentally-friendly mobility by covering both the access and regress end of a public transport trip, thereby increasing the efficiency of public transport (Soteropoulos, Berger, and Ciari Citation2019). With driverless operation, smaller vehicles become relatively economic, creating scope for flexible on-demand 24/7 operation.
Automated shuttles as feeders to public transport systems are currently being tested in a number of public trials, mostly in low-speed, controlled, semi-public environments. The commercial deployment of automated Shuttles in more dynamic, mixed traffic situations on public roads is expected soon, probably by the end of this decade (Beiker Citation2019; Stocker and Shaheen Citation2019). These expectations, however, can only be realized if automated shuttles are accepted and used as intended.
A growing body of literature is examining automated vehicle acceptance. This study builds on the Unified Theory of Acceptance and Use of Technology (UTAUT) (Venkatesh, Thong, and Xu Citation2012). UTAUT posits that performance expectancy (i.e., degree to which using a technology will provide benefits to consumers in performing certain activities), effort expectancy (i.e., degree of ease associated with consumers' use of technology), social influence (i.e., degree to which consumers perceive that important others believe they should use a particular technology), and facilitating conditions (i.e., consumer's perceptions of the resources and support available to perform a behaviour) influence the behavioural intention of an individual to use a technology, while behavioural intention and facilitating conditions determine actual system usage (Venkatesh et al. Citation2003). UTAUT2 suggests that an individual's behavioural intention to use information technology is influenced by three constructs in addition to the original UTAUT constructs, i.e., hedonic motivation (i.e., fun or pleasure derived from using a technology), price value (i.e., monetary cost of technology use), and habit (i.e., degree to which an individual believes the behaviour to be automatic) (Venkatesh, Thong, and Xu Citation2012, 161).
Madigan et al. (Citation2017) showed that the UTAUT2 constructs performance expectancy, social influence, facilitating conditions, and hedonic motivation predict the behavioural intention to use automated shuttles. This paper aims to enhance our understanding of the process leading to behavioural intention investigating the interrelationships between the UTAUT2 constructs performance expectancy, effort expectancy, social influence, facilitating conditions, and hedonic motivation. The relevance of examining the relationships between technology acceptance constructs has been acknowledged (Karahanna, Agarwal, and Angst Citation2006). There is still limited knowledge about the interrelationships between the various factors impacting automated vehicle acceptance, including the UTAUT2 constructs. Acheampong and Cugurullo (Citation2019) argue that automated vehicle acceptance is a complex and multifaceted research theme that can only be fully understood when an interdisciplinary perspective is adopted and the interrelationships between various acceptance factors are considered. For example, the literature on automated vehicle acceptance has identified the UTAUT2 constructs performance expectancy, effort expectancy, social influence, facilitating conditions, and hedonic motivation as predictors of individuals' behavioural intentions to use automated shuttles. However, there is limited knowledge about the factors that determine the UTAUT2 predictors. Thus, beyond asking „To what extent do performance expectancy, effort expectancy, social influence, facilitating conditions, and hedonic motivation predict the behavioural intention to use automated shuttles?”, we direct our attention to research questions like: „Which factors predict performance expectancy, effort expectancy, social influence, facilitating conditions, and hedonic motivation?” Examining the interrelationships between the UTAUT2 constructs thus enables us to identify underlying beliefs and devise adequate strategies to promote automated vehicle acceptance.
Madigan et al. (Citation2017) did not consider the influence of car and public transport use, technology savviness and automated shuttle experience on the UTAUT2 predictor constructs and behavioural intention. Prior research has supported the role of these constructs for automated vehicle acceptance (Asgari and Jin Citation2019; Bansal, Kockelman, and Singh Citation2016; Lavieri et al. Citation2017; Shabanpour et al. Citation2017; Nordhoff, De Winter, et al. Citation2019). For these reasons, the present study examines the relationships between these factors and the UTAUT2 constructs.
1.1. Research objectives
The objectives of the current study, conducted as part of the CityMobil2 project, were therefore to examine:
Relationships between the UTAUT2 constructs performance expectancy, effort expectancy, social influence, facilitating conditions and hedonic motivation
Relationships between a person's travel behaviour (i.e., measured by car and public transport use) and the UTAUT2 constructs performance expectancy, effort expectancy, social influence, facilitating conditions, hedonic motivation and individuals' behavioural intentions to use automated shuttles in public transport
Relationships between a person's travel behaviour (i.e., measured by car and public transport use) and the UTAUT2 constructs performance expectancy, effort expectancy, social influence, facilitating conditions, hedonic motivation, and individuals' behavioural intentions to use automated shuttles in public transport
Relationships between a person's automated shuttle experience and the UTAUT2 constructs performance expectancy, effort expectancy, social influence, facilitating conditions, hedonic motivation and individuals' behavioural intentions to use automated shuttles in public transport
1.2. Hypotheses development and model formulation
1.2.1. Direct and indirect relationships between UTAUT2 constructs
The relevance of the UTAUT2 constructs performance expectancy, social influence, hedonic motivation and facilitating conditions to predict behavioural intentions to use automated vehicles has been supported by various studies (Kaur and Rampersad Citation2018; Madigan et al. Citation2016; Madigan et al. Citation2017; Panagiotopoulos and Dimitrakopoulos Citation2018; Xu et al. Citation2018). The role of effort expectancy in predicting automated vehicle acceptance has been ambiguous. Madigan et al. (Citation2016) and Wu et al. (Citation2019) supported a positive direct effect of effort expectancy on behavioural intention, while the effect of effort expectancy on behavioural intention was not significant in the study of Madigan et al. (Citation2017). Panagiotopoulos and Dimitrakopoulos (Citation2018), Wu et al. (Citation2019), and Zhang et al. (Citation2019) reported positive effects of effort expectancy on performance expectancy, which reflects the literature on technology acceptance (Adams, Nelson, and Todd Citation1992; Chang et al. Citation2015; Karahanna, Agarwal, and Angst Citation2006; Venkatesh and Davis Citation2000). Based on these findings, we propose that the effect of effort expectancy on behavioural intention is mediated through performance expectancy. This suggests that any relationship between people's expectations of how difficult automated shuttles will be to use and their intentions to use them can be explained through their expectations around how these vehicles will perform. In line with the above studies, we define effort expectancy as a positive attribute (i.e., high effort expectancy indicates low effort) and hypothesize:
H1: Performance expectancy will have a positive effect on respondents' ratings of the behavioural intention to use automated shuttles.
H2a: Effort expectancy will have a positive effect on respondents' ratings of the behavioural intention to use automated shuttles.
H2b: The effect of effort expectancy on behavioural intention will be mediated through performance expectancy.
H3: Social influence will have a positive effect on respondents' ratings of the behavioural intention to use automated shuttles.
H4: Facilitating conditions will have a positive effect on respondents' ratings of the behavioural intention to use automated shuttles.
H5: Hedonic motivation will have a positive effect on respondents' ratings of the behavioural intention to use automated shuttles.
The examination of the relationships between facilitating conditions, performance expectancy and effort expectancy as well as hedonic motivation has been underrepresented by the literature on automated vehicle acceptance so far. Empirical evidence for these relationships already exists in other domains. Bervell and Umar (Citation2017) applied UTAUT to Learning Management Systems and found significant effects of facilitating conditions on performance expectancy and effort expectancy. It is likely that supportive infrastructure will encourage individuals to come to believe that automated shuttles are useful, easy to use and pleasurable. In Merat et al. (Citation2018), respondents showed a preference for automated shuttles travelling in a designated lane, showing the link between the infrastructure provided and people's attitudes towards automated shuttles. Thus, we hypothesize:
H6: Facilitating conditions will have a positive effect on respondents' ratings of performance expectancy.
H7: Facilitating conditions will have a positive effect on respondents' ratings of effort expectancy.
H8: Facilitating conditions will have a positive effect on respondents' ratings of hedonic motivation.
Venkatesh and Davis (Citation2000) assumed relationships between subjective norm and perceived usefulness. Acheampong and Cugurullo (Citation2019) addressed the interrelationships between the UTAUT constructs and found positive effects of subjective norm (equivalent to social influence) on the perceived benefits (equivalent to performance expectancy, see Xu et al. Citation2018; Zhang et al. Citation2019), and ease of use of automated driving technology (equivalent to effort expectancy), and a positive relationship between subjective norm and perceived behavioural control (equivalent to facilitating conditions). Koenig-Lewis et al. (Citation2015) supported the positive relationship between social influence and perceived usefulness and ease of use. Bervell and Umar (Citation2017) hypothesized positive effects of social influence on performance expectancy, which, however, could not be supported by their data. The authors further revealed a positive relationship between facilitating conditions and social influence. Kumar and Bervell (Citation2019) applied the UTAUT2 model to examine the acceptance of Google classroom and revealed significant relationships between social influence and hedonic motivation. Consequently, we assume a positive relationship between social influence and hedonic motivation. In line with Venkatesh and Davis (Citation2000), the underlying assumptions for all these hypotheses are that if individuals think that people important to them believe they should use automated shuttles, they are more inclined to comply with the referents and believe that automated shuttles are useful, easy to use, that they have the necessary resources, and that automated shuttles are enjoyable. Thus, we hypothesize:
H9: Social influence will have a positive effect on respondents' ratings of performance expectancy.
H10: Social influence will have a positive effect on respondents' ratings of effort expectancy.
H11: Social influence will have a positive effect on respondents' ratings of facilitating conditions.
H12: Social influence will have a positive effect on respondents' ratings of hedonic motivation.
Studies further provided empirical evidence for positive effects of perceived enjoyment (equivalent to our construct hedonic motivation) on perceived usefulness (equivalent to performance expectancy) and perceived ease of use (equivalent to effort expectancy) in the field of technology acceptance (Koenig-Lewis et al. Citation2015; Teo and Noyes Citation2011). The underlying assumption is that if automated shuttles are perceived to be enjoyable, individuals will be more inclined to believe that automated shuttles are useful and easy to use. We hypothesize:
H13: Hedonic motivation will have a positive effect on respondents' ratings of performance expectancy.
H14: Hedonic motivation will have a positive effect on respondents' ratings of effort expectancy.
1.3. Car and public transport use
The private car has remained the most attractive mode of transport despite creating serious collective disadvantages, such as traffic congestion, accidents, and environmental pollution (Beirão and Cabral, Citation2007; Tertoolen, Van Kreveld, and Verstraten Citation1998). It has been associated with a source of sensation seeking, power, freedom, status, superiority, convenience, speed, comfort, rapidity, and flexibility (Anable and Gatersleben Citation2005; Beirão and Cabral, 2007; Hagman Citation2003; Jensen Citation1999; Steg Citation2005). We would expect a negative relationship between car use and the intention to use automated shuttles, and a positive relationship between public transport use and the intention to use automated shuttles in public transport. In Nielsen and Haustein (Citation2018), individuals with higher concerns regarding self-driving cars reported a higher share of driving on a daily basis compared to individuals who were indifferent and enthusiastic towards self-driving cars. Zmud and Sener (Citation2017) found that car users were less likely and users of other modes of transport (e.g., walking, vehicle passengers) more likely to use automated vehicles, and Nazari, Noruzoliaee, and Mohammadian (Citation2018) found a negative relationship between daily vehicle miles travelled and the inclination towards private and shared automated vehicles. It was further found that individuals who frequently travel with non-car travel modes (i.e., public transport, biking, walking) are more likely to be interested in automated vehicle technology. Haboucha, Ishaq, and Shiftan (Citation2017) revealed that individuals who never use public transport were less likely to use shared automated vehicles. This corresponds with Liljamo, Limatainen, and Pöllänen (2018) who found that individuals using public transport and who do not have a car had more positive attitudes towards automated vehicles.
There is still a paucity of knowledge about how car and public transport use affect the UTAUT2 constructs performance expectancy, effort expectancy, social influence, facilitating conditions, and hedonic motivation. Understanding these relationships will help to inform the factors which might increase the likelihood of car drivers being willing to change to automated shuttles. To the best of our knowledge, our study is the first that investigates such a relationship. We hypothesize that individuals who frequently use a car will find automated shuttles in public transport less useful in attaining their mobility needs than individuals who frequently use public transport. The underlying assumption is that reliability, frequency, accessibility, and competitive costs were the frequently cited reasons that motivate car use and discourage the use of public transport (Redman et al. Citation2013).
We further hypothesize that individuals who frequently use a car find automated shuttles in public transport less easy to use and are less likely to believe that they have the necessary resources to use automated shuttles in public transport than frequent public transport users. This corresponds with Hine and Scott (Citation2000) who found that car users were more concerned about way-finding through an interchange and their need for information about travel than users of public transport.
H15: Car use will have a negative effect on respondents' ratings of performance expectancy.
H16: Car use will have a negative effect on respondents' ratings of effort expectancy.
H17: Car use will have a negative effect on respondents' ratings of facilitating conditions.
H18: Car use will have a negative effect on respondents' ratings of hedonic motivation.
H19: Car use will have a negative effect on respondents' ratings of the behavioural intention to use automated shuttles.
We further expect that car users will find automated shuttles in public transport less enjoyable than frequent users of public transport. Asgari and Jin (Citation2019) provide empirical evidence for a negative relationship between the enjoyment of driving and the adoption of automated vehicles and the willingness to pay for automated driving features. This corresponds with Haboucha, Ishaq, and Shiftan (Citation2017) who found that individuals who enjoy driving a car were more likely to use their regular car than an automated shuttle. We hypothesize:
H20: Public transport use will have a positive effect on respondents' ratings of performance expectancy.
H21: Public transport use will have a positive effect on respondents' ratings of effort expectancy.
H22: Public transport use will have a positive effect on respondents' ratings of facilitating conditions.
H23: Public transport use will have a positive effect on respondents' ratings of hedonic motivation.
H24: Public transport use will have a positive effect on respondents' ratings of the behavioural intention to use automated shuttles.
1.4. Technology savviness
In MAVA, our multi-level model on automated vehicle acceptance, technology savviness is associated with an individual's innovativeness, the number and type of technologies used, curiosity, technology readiness, openness, interest, or optimism (Nordhoff, De Winter, et al. Citation2019). On the basis of a literature review of surveys about automated vehicles, Gkartzonikas and Gkritza (Citation2019) defined consumer innovativeness as concept that can potentially influence an individual's intention to take a ride in an automated vehicle. In the study of Asgari and Jin (Citation2019), Lavieri et al. (Citation2017) and Shabanpour et al. (Citation2017), tech-savvy individuals were more likely to be early adopters of autonomous vehicles. Nazari, Noruzoliaee, and Mohammadian (Citation2018) found that mobility-on-demand (MOD) savviness (i.e., owning a smartphone, frequency of using app-based carsharing and ride-sourcing) was positively correlated with an interest in automated vehicle technology, and an interest in commuting with automated vehicles. These studies provide empirical evidence for a positive relationship between technology savviness and the intention to use automated vehicles.
While there is empirical evidence for the relationship between technology savviness and behavioural intention, there is still limited understanding of how technology savviness is related to the UTAUT2 constructs performance expectancy, effort expectancy, social influence, facilitating conditions, and hedonic motivation. Bansal, Kockelman, and Singh (Citation2016) found more positive attitudes towards automated vehicle technologies among technology-savvy individuals. We hypothesize that tech-savvy individuals will be more likely to consider automated shuttles useful (i.e., performance expectancy), and enjoyable (i.e., hedonic motivation) because they are more open towards and interested in new technologies and more likely to see the added value of automated shuttles. Furthermore, due to their technology affinity, they are more likely to believe they have the necessary resources to use automated shuttles (i.e., facilitating conditions), and that it is easy to learn how to use automated shuttles (i.e., effort expectancy). As they are more likely to be surrounded with like-minded peers, they are also more likely to believe that people important to them will appreciate their use of automated shuttles (i.e., social influence). We hypothesize:
H25: Technology savviness will have a positive effect on respondents' ratings of performance expectancy.
H26: Technology savviness will have a positive effect on respondents' ratings of effort expectancy.
H27: Technology savviness will have a positive effect on respondents' ratings of social influence.
H28: Technology savviness will have a positive effect on respondents' ratings of facilitating conditions.
H29: Technology savviness will have a positive effect on respondents' ratings of hedonic motivation.
H30: Technology savviness will have a positive effect on respondents' ratings of the behavioural intention to use automated shuttles.
1.5. Automated shuttle experience
The intention to use automated vehicles is a function of an individual's knowledge of and experience with automated vehicles (Nordhoff, De Winter, et al. Citation2019). Berliner, Hardman, and Tal (Citation2019) found that individuals who reported a higher level of knowledge of automated vehicles were more interested in purchasing them. The scientific literature further supports the relationship between automated vehicle experience, performance expectancy and effort expectancy. Liu, Guo, et al. (Citation2019) found that individuals who heard of self-driving vehicles gave higher ratings to the perceived benefits of automated vehicles (equivalent to performance expectancy), and to items that pertain to the trust in automated vehicles, while they gave lower ratings to the perceived dread and perceived risks of automated vehicles. This corresponds with Liu, Xu, et al. (Citation2019) who found that respondents' ratings of positive affect, perceived benefit, acceptance of road tests and social trust increased, while their ratings of negative affect and perceived risk decreased. Xu et al. (Citation2018) revealed that experience with automated vehicles increased the perceived usefulness and ease of use of automated vehicles, and increased the strength of the effects of perceived usefulness and ease of use on individuals' intentions to use automated vehicles. These findings correspond with research on the determinants of electronic health records where experience had positive effects on the perceived usefulness and ease of use (Tubaishat Citation2017). While empirical research supports the relationship between automated shuttle experience, performance expectancy, effort expectancy and behavioural intention, there is a paucity of knowledge on how experience affects the UTAUT2 constructs facilitating conditions and hedonic motivation. We hypothesize:
H31: Experience with automated shuttles will have a positive effect on respondents' ratings of performance expectancy.
H32: Experience with automated shuttles will have a positive effect on respondents' ratings of effort expectancy.
H33: Experience with automated shuttles will have a positive effect on respondents' ratings of facilitating conditions.
H34: Experience with automated shuttles will have a positive effect on respondents' ratings of hedonic motivation.
H35: Experience with automated shuttles will have a positive effect on respondents' ratings of the behavioural intention to use automated shuttles.
2. Method
2.1. Automated shuttle, route and procedure
The demonstration involved six automated shuttles from the French company Robosoft that operated on a dedicated lane on a route of 2.5 km with eight stops in the Trikala city centre in Greece. The shuttle carried up to 10 passengers per trip and ran at an average speed of around 13 km/h. A steward was on board the shuttle to intervene in the shuttle operations when requested by the automated driving system. A purposive sample was drawn among individuals who used the automated shuttle at least once during the demonstration in order to ensure that only individuals with some knowledge of these shuttles entered the sample. Respondents filled out the questionnaire on tablet computers that were administered by members of staff from E-Trikala. The information was recorded anonymously and no financial compensation was offered to respondents. An image of the automated shuttle that was deployed in the CityMobil2 demonstration is provided in .

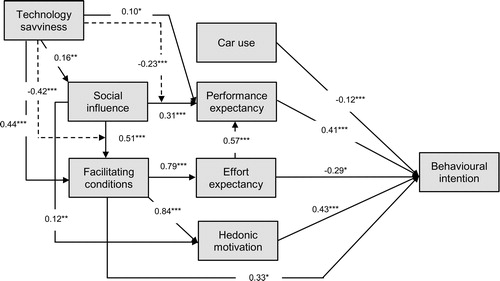
Figure 2. Significant structural path relationships in second model. Dashed arrows denote moderation effects.
2.2. Instrument
The design of the 57-item questionnaire, which was adopted from the study of Madigan et al. (Citation2017), was informed by interviews that were conducted in Leeds, U.K. and Braunschweig, Germany. The questionnaire items were translated into Greek by members of the E-Trikala team, and the translation was checked independently by the Institute of Communication and Computer Systems (ICCS) in Greece and a bilingual colleague in England. The study variables are based on established scales from the technology acceptance management literature, including an earlier study on the acceptance of automated shuttles that operated in La Rochelle in France and Lausanne in Switzerland (Madigan et al. Citation2016) as shown by .
Table 1. Measurement of study variables.
2.3. Analysis of responses
Following the recommendations of Anderson and Gerbing (Citation1988), a two-step approach was adopted. In the first step, a confirmatory factor analysis was performed to evaluate the measurement model. This step involves estimating the measurement relationships between the observed variables and their underlying latent variables. Latent variables are theoretical or hypothetical constructs that are not directly measured, which is why they are commonly described as unobserved variables. Latent variables can either be exogenous (i.e., independent), or endogenous (i.e., dependent) variables. The latent exogenous variables in our measurement model are social influence (SI) and facilitating conditions (FC), while the latent endogenous variables are performance expectancy (PE), effort expectancy (EE), hedonic motivation (HM), and behavioural intention (BI). Latent variables are indirectly measured by observed or manifest variables that are directly measured (i.e., questionnaire items). Observed variables can also be exogenous and endogenous (Raykov and Marcoulides Citation2006). The observed exogenous variables are SI1–SI3 and FC1–FC2, while the observed endogenous variables in our measurement model include PE1–PE2, EE1–EE3, HM1–HM3, and BI1–BI3 (see for descriptions). The psychometric properties of the measurement model were assessed by its indicator reliability, internal consistency reliability, convergent validity and discriminant validity. Convergent validity was assessed by four criteria: (1) All scale items should be significant and have loadings exceeding 0.70 on their respective scales, (2) the average variance extracted (AVE) should exceed 0.50, (3) composite reliability (CR) should exceed 0.70, and (4) Cronbach's alpha values should be greater than 0.70 (Anderson and Gerbing Citation1988; Fornell and Larcker Citation1981). Discriminant validity of our data was examined with the test of squared correlations by Anderson and Gerbing (Citation1988), which implies that the correlation coefficient between two latent variables is smaller than the square root of the average variance extracted (AVE) of each latent variable.
Table 2. Descriptive statistics and results of the confirmatory factor analysis.
In the second step of our analysis, a structural equation model, which relates the latent and observed variables to each other, was built in order to test the hypotheses H1–H36 and determine the weighting factors in order to quantify the strength of the relationships between our latent variables (Chau Citation1997). Covariance-based structural equation modelling was used in this study as it is the default technique in R software lavaan package to run the structural equation models. It is the most prevalent technique and is best suited for confirmatory rather than exploratory factor analyses and theory development (Hair et al. Citation2014; Hair, Ringle, and Sarstedt Citation2011). In this step, car and public transport use, technology savviness, and automated shuttle experience were added to the model to investigate their relationships with the latent variables.
Structural equation modelling is a powerful technique for multivariate data techniques that is particularly suited to investigating multiple indirect and direct effects among variables and to assess the convergence between a theoretical model and empirical data. Evaluating the structural model involves estimating the path coefficients (i.e., standardized regression weights), which indicate the strengths of the relationships between the variables, their level of significance, and the R–square values (i.e., amount of variance explained) (Backhaus, Erichson, and Weiber Citation2015). Maximum likelihood estimation (MLE) was used for this calculation. To deal with missing data, we used Full Information Maximum Likelihood (FIML), which is deemed to be superior to other methods of missing data treatment (Schafer and Graham Citation2002).
With 315 respondents our study meets the suggested minimum sample size requirement of 100 to achieve adequate power in MLE technique (Hair et al. Citation1998). Multiple fit indices will be reported to account for the weaknesses inherent in different indices: Comparative Fit Index (CFI) ≥ 0.90, Root Mean Square Error of Approximation (RMSEA) ≤ 0.08, and the Standardized Root Mean Square Residual (SRMR) ≤ 0.06 (Hair et al. Citation2014; Hooper, Coughlan, and Mullen Citation2008; Hu and Bentler Citation2009; Schreiber et al. Citation2006). Structural equation modelling was performed with the R package lavaan 0.5–20 (Rosseel Citation2012).
2.4. Respondents
315 participants completed the questionnaire between December 2015 and February 2016, of which 54.6% were male and 45.4% female. Respondents had an average age of 33.35 years (SD = 10.76). Most of the respondents used the automated shuttle twice (M = 2.23, SD = 1.39), and interacted with it three or four times (M = 3.64, SD = 1.60). Respondents' reported car use was on average four days a week (M = 3.92, SD = 2.90, Min = 0, Max = 22), and their reported public transport use was on average two days a week (M = 2.05, SD = 5.45, Min = 0, Max = 85). For technology savviness, 36.82% of respondents rated themselves among the first trying a new technology product, 46.35% in the middle, and 16.83% among the last.
3. Results
3.1. Confirmatory factor analysis
The measurement model consists of the six latent variables performance expectancy, effort expectancy, social influence, hedonic motivation, facilitating conditions and behavioural intention and their underlying observed variables.
The descriptive statistics of our latent variables and the results of the confirmatory factor analysis are shown in . Note that we used the same operationalization of our study constructs that was applied in the study of Madigan et al. (Citation2017). Model fit parameters were acceptable for all latent variables (see ).
All scale items exceeded the recommended threshold of 0.7 and were statistically significant. Composite reliability and Cronbach's alpha both exceeded the recommended threshold of 0.7, confirming internal consistency reliability. Cronbach's alpha and composite reliability for the entire instrument were 0.93 and 0.97, respectively. The average variance extracted (AVE) values exceeded the recommended threshold of 0.5 for all latent variables, ranging between 0.64 and 0.74. The variance inflation factors (VIFs) of our latent constructs reported in are all below 3.3, which represents an accepted rule of thumb to rule out multi-collinearity (Hair et al. Citation2017; Kline Citation2015; Kock Citation2015). As shown by , which reports the Pearson correlations between the constructs, discriminant validity was acceptable for all latent variables.
Table 3. Inter-construct correlation matrix.
3.2. Structural model testing
We ran two structural models as presented in , and the significant relationships of the most advanced (second) model are shown in .
Table 4. Structural equation models: hypothetical path, standardized path coefficients (β), and variance explained (R 2 ).
In the first structural model, the main effects of the UTAUT2 constructs, car and public transport use, technology savviness and automated shuttle experience on the behavioural intention to use automated shuttles and the interrelationships between these constructs were investigated. It was further investigated to what extent the relationship between effort expectancy and behavioural intention was mediated by performance expectancy.
Technology savviness had significant relationships with social influence, facilitating conditions, and performance expectancy in the first model. Therefore, in a second structural model, we investigated whether the relationships between (1) social influence and facilitating conditions, and (2) social influence and performance expectancy is moderated by technology savviness. Therefore, we created mean-centred interaction terms of social influence and technology savviness. As shown by , the moderation analysis revealed that the relationships between social influence and facilitating conditions and social influence andv performance expectancy were moderated by technology savviness.
4. Discussion
The present study enhanced our understanding of the factors influencing automated shuttle acceptance and their interrelationships. Structural equation modelling was used to investigate the direct and indirect effects of the UTAUT2 constructs on the behavioural intention to use automated shuttles.
4.1.1. Direct and indirect relationships between UTAUT2 constructs
In line with Madigan et al. (Citation2017), who used the same dataset, hedonic motivation was the strongest predictor of individuals' behavioural intentions to use automated shuttles in public transport before and after adding car and public transport use, technology savviness and automated shuttle experience to the model.
The majority of research studies on automated vehicle acceptance, including the study of Madigan et al. (Citation2017), examined the direct effects of the UTAUT2 constructs performance expectancy, effort expectancy, social influence, facilitating conditions and hedonic motivation on individuals' behavioural intentions to use automated shuttles. This study also examined the indirect effects of the UTAUT2 constructs by their interrelationships. Unlike Madigan et al. (Citation2017), the present study also considered the influence of car and public transport use, technology savviness and automated shuttle experience on behavioural intention. Furthermore, this study investigated to what extent the relationship between effort expectancy and behavioural intention was mediated by performance expectancy. This provides additional insights outlining the ways in which the various acceptance constructs interact to inform individuals' decisions about whether to use automated shuttles in the future (see ).
Both Madigan et al. (Citation2017) and the present study found a positive correlation between effort expectancy and behavioural intention in a bivariate correlation context (see ). Our study has revealed that the effect of effort expectancy on behavioural intention was mediated by performance expectancy when the interaction effect between social influence and technology savviness was included in the model (second model). Technology savviness was a negative moderator of the relationship between social influence and facilitating conditions and between social influence and performance expectancy, implying that these relationships are weaker for tech-savvy individuals. This suggests that tech-savvy individuals rely less on their social networks to nurture their beliefs that automated shuttles are useful and to have the necessary resources to use automated shuttles. This finding is not counter-intuitive as tech-savvy individuals may have more positive beliefs regarding the expected benefits of automated shuttles and sufficient confidence in their skills and capabilities to use automated shuttles.
4.1.2. Car and public transport use
Car use was a negative predictor of the behavioural intention to use automated shuttles in public transport. This suggests that car users might be among the customer segments with more negative views towards automated shuttles in public transport. This finding corresponds with research studies, which have revealed that car users expressed a lower interest to use and buy automated vehicles and were less likely to use public transport (Berliner, Hardman, and Tal Citation2019; Krueger, Rashidi, and Rose Citation2016; Nordfjærn et al. Citation2015).
The effects of public transport use on the UTAUT2 constructs performance expectancy, effort expectancy, social influence, facilitating conditions, hedonic motivation, and behavioural intention were not significant. This contradicts the study of Haboucha, Ishaq, and Shiftan (Citation2017) who found a negative relationship between public transport use and the use of a shared automated vehicle.
4.1.3. Technology savviness
The positive relationships between technology savviness and social influence as well as between technology savviness and facilitating conditions correspond with Acheampong and Cugurullo (Citation2019). Our findings suggest that tech-savvy individuals are more likely to believe they are in possession of the necessary resources to use automated shuttles and that people important to them will appreciate their use of automated shuttles.
The positive relationship between technology savviness and performance expectancy in the second model suggests that technology-savvy individuals are more likely to consider automated shuttles useful. This finding corresponds with the literature on automated vehicle acceptance that reports a positive relationship between technology savviness and attitudes towards automated vehicles (Bansal, Kockelman, and Singh Citation2016; Lavieri et al. Citation2017).
4.1.4. Automated shuttle experience
Automated shuttle experience did not exert a positive effect on automated vehicle acceptance. This corresponds with studies which found that familiarity with automated shuttles did not predict willingness to pay for automated vehicles (Bansal and Kockelman Citation2018), and did not show positive effects on support for automated vehicles (Distler, Lallemand, and Bellet Citation2018; Dixon et al., 2018). However, studies also reveal that experienced and knowledgeable individuals were more positive towards automated vehicles, and more likely to intend to use them in comparison to less experienced and knowledgeable individuals (Liu, Xu, et al. Citation2019). Most of the studies on automated vehicle acceptance are based on respondents' knowledge (e.g., knowledge respondents gain in the context of the study, through media, other information channels, friends/colleagues) rather than direct physical experience with automated vehicles (Nordhoff, De Winter, et al. Citation2019). Tennant, Stares, and Howard (Citation2019) pointed to the difficulties in researching public opinions towards automated vehicles, and posited that it is speculative to assume that public unease will decline as people become more familiar with automated vehicles. Dixon et al. (Citation2020) suggested that simply experiencing automated vehicles will be ineffective in establishing automated vehicle acceptance.
4.2. Recommendations for future research
First, we recommend future research to evaluate whether the pleasure of being driven (or hedonic motivation in more scientific terms) can be enhanced by the possibility for travellers to engage in on-board, non-driving related activities. Research has demonstrated that a positive utility can be derived from using public transport due to the commuters' ability to listen to music or audio books, browse the internet, enjoy the scenery, talk on the phone, sleep, think and relax (Handy, Weston, and Mokhtarian Citation2005; Larson Citation1998; Mokhtarian and Salomon Citation2001; Salomon and Mokhtarian Citation1997). Pudāne et al. (Citation2019) proposed that the availability of automated vehicles/limited planning, travel continuity, and comfort have a positive impact on the perceived pleasure of travelling in automated vehicles. More research is necessary to disentangle the relationship between these characteristics and driving pleasure. This shall include trust in automation and perceived safety, which are key factors in the acceptance of automated driving (Choi and Ji Citation2015; Nordhoff, De Winter, et al. Citation2019; Zhang et al. Citation2019).
Second, automated shuttles in public transport will cover small to medium distances between public transport nodes and individuals' destinations (i.e., trips to or from public transport stations). Consequently, the ability and willingness to pursue recreational or work-related activities may be limited and the full potential of automated shuttles in public transport not leveraged. Future research should address the various user needs along different parts of the journey that most likely yield different implications for vehicle manufacturers, designers, operators and mobility providers to effectively market automated shuttles (Yap, Correira, and Van Arem Citation2015). In particular, it should be investigated which attributes of automated shuttles in public transport attract car users in order to encourage a modal shift.
Third, future research should focus on identifying additional constructs such as a person's personality (Madigan et al. Citation2016; Yap, Correira, and Van Arem Citation2015) and macro-level factors (Nordhoff, De Winter, et al. Citation2019) to investigate whether these factors can increase the explanatory power of our model and account for the remaining variance in behavioural intention.
Fourth, future research should investigate whether it is reasonable to merge the constructs effort expectancy and facilitating conditions given (1) the ambiguous role of effort expectancy in research on the acceptance of automated vehicles as highlighted before, and (2) the relatively strong relationship between effort expectancy and facilitating conditions that was detected in our study. Zoellick et al. (Citation2019) did not use perceived ease of use (i.e., equivalent of effort expectancy) as latent construct in their analysis due to the difficulties to apply it to the context of automated public transport, and Madigan et al. (Citation2017) proposed to exclude effort expectancy from future studies as it was not a significant predictor of the intentions to use automated shuttles. The current study provides further evidence of the difficulties in understanding how effort expectancy might link to automated technology use. A possible explanation is that respondents are not well able to discriminate between effort expectancy, performance expectancy and facilitating conditions. Furthermore, we encourage researchers to revisit the operationalization of facilitating conditions. The items measuring facilitating conditions are usually expressed in very generic terms (i.e., resources, knowledge), leaving ample room for respondents to speculate on the meaning of this construct and attach different meanings to it, which can bias the true effects of facilitating conditions on behavioural intention.
Fifth, we recommend future research to revisit the relationship between automated shuttle experience and acceptance, making more use of experienced versus non-experienced individuals (Tennant, Stares, and Howard Citation2019), and examine not only the amount but also the qualitative experience influencing important aspects of automated vehicle acceptance, such as symbolic-affective (e.g., pleasure, comfort), and domain-specific factors (e.g., performance expectancy and effort expectancy, compatibility; Nordhoff et al., under review).
Sixth, studies modelled technology savviness as a function of individual demographics, household composition, commute characteristics, and new technology usage (Bansal, Kockelman, and Singh Citation2016; Lavieri et al. Citation2017). We encourage future research to investigate the relationship between technology savviness and the UTAUT2 constructs, using multiple-item scales (see Section 4.6.) to better understand the specific nature of technology savviness, and the consequences of its operationalization for its relationship with technology acceptance constructs.
4.3. Implications for policy and practice
The study yields important implications for policy and practice.
First, the strong positive effect of hedonic motivation on behavioural intention suggests that one possible strategy to promote the uptake of automated shuttles is to make travelling with automated shuttles enjoyable, for instance, through high comfort levels. Furthermore, vehicle manufacturers, public transport companies, operators, policy-makers and the media should advertise the benefits of travelling with automated shuttles and emphasize the hedonic aspects, transforming the “pleasure of driving” – a prominent marketing slogan to increase the attractiveness of the car (BMW Citation2013) – into the “pleasure of being driven”.
Second, we found strong positive effects of facilitating conditions on effort expectancy and hedonic motivation. These findings imply that a supportive infrastructure is more likely to give rise to a positive opinion about automated shuttles in terms of perceived enjoyment and ease of use. A supportive infrastructure could encompass the provision of accessibility to the shuttle using a wheelchair ramp, ensuring an uncomplicated booking and payment process (e.g., including the use of automated vehicles in public transport tickets), and offering information on routes and interchanges either in or outside the shuttle, in close proximity to the stations, and via an app (Nordhoff, De Winter, et al. Citation2019). The strong positive effect of effort expectancy on performance expectancy implies that the complexity of using automated shuttles should be reduced and the clarity of the interaction between humans and automated shuttles increased (Zhang et al. Citation2019).
Third, in line with the findings of König and Neumayr (Citation2017), who over-sampled car-users in their study (i.e., 442 car users versus 47 non-car users), educating car users about the functions, benefits and limitations of the technology in terms of free test rides, comprehensive explanations prior to usage, and free/cheap courses could be a practical method by which the resistance to automated shuttles among car-users could be overcome. Sparrow and Howard (Citation2017) posit that the combination of a rail network with a fleet of autonomous vehicles serving passengers arriving at and departing from each station and offering a door-to-door public transport service could solve the first and last mile problem, thus catering to the needs and preferences of car users.
Fourth, in order to enhance technology savviness, policy makers, manufacturers and public transport companies should develop strategies to identify the segments who are more amenable to adoption (Pettigrew, Dana, and Norman Citation2019). Opportunities for trial should be offered to increase the visibility of usage (Pettigrew, Dana, and Norman Citation2019).
4.4. Study limitations
First, the automated shuttle in this study operated at a low speed, on a dedicated route with fixed stops that had to be shared by multiple passengers at the same time.
Second, car and public transport use, technology savviness and automated shuttle experience were measured by single-item scales, which is a limitation in scientific research (Wanous, Reichers, and Hudy Citation1997). Future research should use multiple-item scales, e.g., similar to the scales in the studies of Asgari and Jin (Citation2019), Bansal, Kockelman, and Singh (Citation2016), Haboucha, Ishaq, and Shiftan (Citation2017), Lee and Mirman (Citation2018), and Nazari, Noruzoliaee, and Mohammadian (Citation2018).
Third, while structural equation models are useful to model complex relationships between latent and observed variables, the ability to make causal inferences and establish a clear temporal precedence using cross-sectional data is limited (Bagley and Mokhtarian Citation2002). (Quasi-) experimental studies that measure individuals' opinions before and after they are exposed to automated shuttles should be performed, varying attributes of the transport offered, because they are more suitable to isolate the causes from the effects and thus determine the temporal, cause-effect nature of the relationships between two or more variables (Gould and Golob Citation1998).
4.5. Final conclusions
The present study investigated the interrelationships between the UTAUT2 constructs performance expectancy, effort expectancy, social influence, facilitating conditions, and hedonic motivation to add to existing research on automated vehicle acceptance that mainly considered the UTAUT2 constructs as independent antecedents of individuals' behavioural intentions to use automated shuttles. In the first structural model, fifteen of thirty-five hypotheses could be sustained, while the second structural model sustained thirteen of thirty-five hypotheses. Our analysis has revealed that hedonic motivation was the strongest predictor of the behavioural intention to use automated shuttles, followed by performance expectancy and social influence. The relationship between effort expectancy and behavioural intention was mediated by performance expectancy. This implies that people's expectations of how difficult automated shuttles will be to use and their intentions to use them can be explained through their expectations around how these vehicles will perform. The relationships between social influence and facilitating conditions and between social influence and performance expectancy, respectively, were moderated by technology savviness. Individuals with a low technology savviness were less likely to believe that they have the necessary resources to use automated shuttles or that automated shuttles are useful than individuals with a high technology savviness. Car use was a negative predictor of the behavioural intention to use automated shuttles in public transport. We expect that the findings obtained in this study provide useful insights for policy-makers, vehicle manufacturers, public transport companies, operators and designers to inform the design and implementation of automated shuttles.
Acknowledgements
The authors would like to thank the CityMobil2 consortium for making the data from the CityMobil2 project available.
Disclosure statement
The authors declare that there is no conflict of interest regarding the publication of this paper.
This article has been republished with minor changes. These changes do not impact the academic content of the article.
Additional information
Notes on contributors
Sina Nordhoff
Ruth Madigan
Bart Van Arem
Natasha Merat
Riender Happee
References
- Acheampong, R.A., and F. Cugurullo. 2019. “Capturing the Behavioural Determinants behind the Adoption of Autonomous Vehicles: Conceptual Frameworks and Measurement Models to Predict Public Transport, Sharing and Ownership Trends of Self-Driving Cars.” Transportation Research Part F: Traffic Psychology and Behaviour 62: 349–375.
- Adams, D.A., R.R. Nelson, and P.A. Todd. 1992. “Perceived Usefulness, Ease of Use, and Usage of Information Technology: A Replication.” MIS Quarterly 16 (2): 227–247. doi:10.2307/249577.
- Anable, J., and B. Gatersleben. 2005. “All Work and No Play? The Role of Instrumental and Affective Factors in Work and Leisure Journeys by Different Travel Modes.” Transportation Research Part A: Policy and Practice 39 (2-3): 163–181. doi:10.1016/j.tra.2004.09.008.
- Anderson, J.C., and D.W. Gerbing. 1988. “Structural Equation Modeling in Practice: A Review and Recommended Two-Step Approach.” Psychological Bulletin 103 (3): 411–423. doi:10.1037/0033-2909.103.3.411.
- Asgari, H., and X. Jin. 2019. “Incorporating Attitudinal Factors to Examine Adoption of and Willingness to Pay for Autonomous Vehicles.” Transportation Research Record 2673: 1–12.
- Backhaus, K., B. Erichson, and R. Weiber. 2015. "Neuronale Netze." Fortgeschrittene Multivariate Analysemethoden. 10: 295–347.
- Bagley, M.N., and P.L. Mokhtarian. 2002. “The Impact of Residential Neighborhood Type on Travel Behavior: A Structural Equations Modeling Approach.” The Annals of Regional Science 36 (2): 279–297. doi:10.1007/s001680200083.
- Bansal, P., and K.M. Kockelman. 2018. “Are we Ready to Embrace Connected and Self-Driving Vehicles? a Case Study of Texans.” Transportation 45 (2): 641–675. doi:10.1007/s11116-016-9745-z.
- Bansal, P., K.M. Kockelman, and A. Singh. 2016. “Assessing Public Opinions of and Interest in New Vehicle Technologies: An Austin Perspective.” Transportation Research Part C: Emerging Technologies 67: 1–14. doi:10.1016/j.trc.2016.01.019.
- Beiker, S.A. 2019. “Deployment of Automated Driving as an Example for the San Francisco Bay Area.” In Road Vehicle Automation 5, edited by G. Meyer and S. Beiker, 117–129. Springer, Cham.
- Beirão, G., and J.A. Sarsfield Cabral. 2007. “Understanding Attitudes towards Public Transport and Private Car: A Qualitative Study.” Transport Policy 14 (6): 478–489. doi:10.1016/j.tranpol.2007.04.009.
- Berliner, R.M., S. Hardman, and G. Tal. 2019. “Uncovering Early Adopters' Perceptions and Purchase Intentions of Automated Vehicles: Insights from Early Adopters of Electric Vehicles in California.” Transportation Research Part F: Traffic Psychology and Behaviour 60: 712–722. doi:10.1016/j.trf.2018.11.010.
- Bervell, B., and I.N. Umar. 2017. “Validation of the UTAUT Model: Re-considering Non-Linear Relationships of Exogeneous Variables in Higher Education Technology Acceptance Research.” EURASIA Journal of Mathematics, Science and Technology Education 13 (10): 6471–6490. doi:10.12973/ejmste/78076.
- BMW. 2013. New BMW campaign: “Designed for driving pleasure”. https://www.press.bmwgroup.com/global/article/detail/T0137101EN/new-bmw-campaign-designed-for-driving-pleasure.
- Chang, C.C., S.W. Hung, M.J. Cheng, and C.Y. Wu. 2015. “Exploring the Intention to Continue Using Networking Sites: The Case of Facebook.” Technological Forecasting and Social Change 95: 48–56. doi:10.1016/j.techfore.2014.03.012.
- Chau, P. Y. K. 1997. “Reexamining a Model for Evaluating Information Center Success Using a Structural Equation Modeling Approach.” Decision Sciences 28 (2): 309–334. doi:10.1111/j.1540-5915.1997.tb01313.x.
- Choi, J.K., and Y.G. Ji. 2015. “Investigating the Importance of Trust on Adopting an Autonomous Vehicle.” International Journal of Human-Computer Interaction 31 (10): 692–702. doi:10.1080/10447318.2015.1070549.
- Cullinane, S. 2002. “The Relationship between Car Ownership and Public Transport Provision: A Case Study of Hong Kong.” Transport Policy 9 (1): 29–39. doi:10.1016/S0967-070X(01)00028-2.
- Davis, F.D. 1989. “Perceived Usefulness Perceived Ease of Use, and User Acceptance of Information Technology.” MIS Quarterly 13 (3): 319–333. doi:10.2307/249008.
- Distler, V., C. Lallemand, and T. Bellet. 2018. “Acceptability and Acceptance of Autonomous Mobility on Demand: The Impact of an Immersive Experience.” In Proceedings of the 2018 CHI Conference on Human Factors in Computing Systems. ACM, 612.
- Dixon, G., P. Sol Hart, C. Clarke, N.H. O Donnell, and J. Hmielowski. 2020. “What Drives Support for Self-Driving Car Technology in the United States?” Journal of Risk Research 23 (3): 275–287. doi:10.1080/13669877.2018.1517384.
- Dudenhöffer, K. 2013. “Why Electric Vehicles Failed: An Experimental Study with PLS Approach Based on the Technology Acceptance Model.” Journal of Management Control 24 (2): 95–124. doi:10.1007/s00187-013-0174-2.
- Fornell, C., and D.F. Larcker. 1981. “Evaluating Structural Equation Models with Unobservable Variables and Measurement Error.” Journal of Marketing Research 18 (1): 39–50. doi:10.2307/3151312.
- Gkartzonikas, C., and K. Gkritza. 2019. “What Have we Learned? A Review of Stated Preference and Choice Studies on Autonomous Vehicles.” Transportation Research Part C: Emerging Technologies 98: 323–337. doi:10.1016/j.trc.2018.12.003.
- Gould, J., and T.F. Golob. 1998. “Clean Air Forever? a Longitudinal Analysis of Opinions about Air Pollution and Electric Vehicles.” Transportation Research Part D: Transport and Environment 3 (3): 157–169. doi:10.1016/S1361-9209(97)00018-7.
- Haboucha, C.J., R.I. Ishaq, and Y. Shiftan. 2017. “User Preferences regarding Autonomous Vehicles.” Transportation Research Part C: Emerging Technologies 78: 37–49. doi:10.1016/j.trc.2017.01.010.
- Hagman, O. 2003. “Mobilizing Meanings of Mobility: Car Users' Constructions of the Goods and Bads of Car Use.” Transportation Research Part D: Transport and Environment 8 (1): 1–9. doi:10.1016/S1361-9209(02)00014-7.
- Hair, J., R. Anderson, R. Tatham, and W. Black. 1998. Multivariate Data Analysis. Englewood Cliffs, New Jersey: Prentice-Hall.
- Hair, J.F., G. T. M. Hult, C.M. Ringle, and M. Sarstedt. 2017. A Primer on Partial Least Squares Structural Equation Modeling (2nd ed.). Thousand Oaks: Sage.
- Hair, J., W.C. Black, B.J. Babin, and R.E. Anderson. 2014. “Multivariate Analysis.” In Pearson New International Edition. Harlow: Essex.
- Hair, J.F., C.M. Ringle, and M. Sarstedt. 2011. “PLS-SEM: Indeed a Silver Bullet.” Journal of Marketing Theory and Practice 19 (2): 139–152. doi:10.2753/MTP1069-6679190202.
- Handy, S., L. Weston, and P.L. Mokhtarian. 2005. “Driving by Choice or Necessity?.” Transportation Research Part A: Policy and Practice 39 (2-3): 183–203. doi:10.1016/j.tra.2004.09.002.
- Hensher, D.A. 1998. “The Imbalance between Car and Public Transport Use in Urban Australia: why Does It Exist?.” Transport Policy 5 (4): 193–204. doi:10.1016/S0967-070X(98)00022-5.
- Hine, J., and J. Scott. 2000. “Seamless, Accessible Travel: users' Views of the Public Transport Journey and Interchange.” Transport Policy 7 (3): 217–226. doi:10.1016/S0967-070X(00)00022-6.
- Hooper, D., J. Coughlan, and M. Mullen. 2008. “Structural Equation Modelling: guidelines for Determining Model Fit.” Electronic Journal of Business Research Methods 6: 53–60.
- Hox, J., J., and T.M. Bechger. 1998. “An Introduction to Structural Equation Modeling.” Family Science Review 11: 354–373.
- Hu, L., and P.M. Bentler. 2009. “Cutoff Criteria for Fit Indexes in Covariance Structure Analysis: Conventional Criteria versus New Alternatives.” Structural Equation Modeling: A Multidisciplinary Journal 6 (1): 1–55. doi:10.1080/10705519909540118.
- Jensen, M. 1999. “Passion and Heart in Transport – a Sociological Analysis on Transport Behaviour.” Transport Policy 6 (1): 19–33. doi:10.1016/S0967-070X(98)00029-8.
- Karahanna, E., R. Agarwal, and C.M. Angst. 2006. “Reconceptualizing Compatibility Beliefs in Technology Acceptance Research.” MIS Quarterly 30: 781–804. doi:10.2307/25148754.
- Kaur, K., and G. Rampersad. 2018. “Trust in Driverless Cars: Investigating Key Factors Influencing the Adoption of Driverless Cars.” Journal of Engineering and Technology Management 48: 87–96. doi:10.1016/j.jengtecman.2018.04.006.
- Kline, R.B. 2015. Principles and Practice of Structural Equation Modelling Methodology in the Social Sciences (4th ed.). NY: Guilford Publication.
- Kock, N. 2015. “Common Method Bias in PLS-SEM: A Full Collinearity Assessment Approach.” International Journal of e-Collaboration 11 (4): 1–10. doi:10.4018/ijec.2015100101.
- Koenig-Lewis, N., M. Morgan, A. Palmer, and A. Zhao. 2015. “Enjoyment and Social Influence: predicting Mobile Payment Adoption.” The Service Industries Journal 35 (10): 537–554. doi:10.1080/02642069.2015.1043278.
- König, M., and L. Neumayr. 2017. “Users' Resistance towards Radical Innovations: The Case of the Self-Driving Car.” Transportation Research Part F: Traffic Psychology and Behaviour 44: 42–52. doi:10.1016/j.trf.2016.10.013.
- Kumar, J.A., and B. Bervell. 2019. “Google Classroom for Mobile Learning in Higher Education: Modelling the Initial Perceptions of Students.” Education and Information Technologies 24 (2): 1793–1817. doi:10.1007/s10639-018-09858-z.
- Krueger, R., T.H. Rashidi, and J.M. Rose. 2016. “Preferences for Shared Autonomous Vehicles.” Transportation Research Part C: Emerging Technologies 69: 343–355. doi:10.1016/j.trc.2016.06.015.
- Lavieri, P.S., V.M. Garikapati, C.R. Bhat, R.M. Pendyala, S. Astroza, and F.F. Dias. 2017. Modeling Individual Preferences for Ownership and Sharing of Autonomous Vehicle Technologies. Accessed at: http://www.caee.utexas.edu/prof/bhat/AB-STRACTS/AV_paper.pdf. doi:10.3141/2665-01.
- Liljamo, T., H. Liimatainen, and M. Pöllänen. 2018. “Attitudes and Concerns on Automated Vehicles.” Transportation Research Part F: Traffic Psychology and Behaviour 59: 24–44. doi:10.1016/j.trf.2018.08.010.
- Larson, J. 1998. “Surveying Commuting.” American Demographics 20: 7.
- Lee, Y.C., and J.H. Mirman. 2018. “Parents' Perspectives on Using Autonomous Vehicles to Enhance Children's Mobility.” Transportation Research Part C: Emerging Technologies 96: 415–431. doi:10.1016/j.trc.2018.10.001.
- Liu, P., Q. Guo, F. Ren, L. Wang, and Z. Xu. 2019. “Willingness to Pay for Self-Driving Vehicles: Influence of Demographics and Psychological Factors.” Transportation Research Part C: Emerging Technologies 100: 306–317. doi:10.1016/j.trc.2019.01.022.
- Liu, P., Z. Xu, and X. Zhao. 2019. “Road Tests of Self-Driving Vehicles: Affective and Cognitive Pathways in Acceptance Formation.” Transportation Research Part A: Policy and Practice 124: 354–369. doi:10.1016/j.tra.2019.04.004.
- Madigan, R., T. Louw, M. Dziennus, T. Graindorge, E. Ortega, M. Graindorge, and N. Merat. 2016. “Acceptance of Automated Road Transport Systems (ARTS): an Adaptation of the UTAUT Model.” In Proceedings of the 6th Transport Research Arena, April 18-21, Warsaw, Poland.
- Madigan, R., T. Louw, M. Wilbrink, A. Schieben, and N. Merat. 2017. “What Influences the Decision to Use Automated Public Transport? Using UTAUT to Understand Public Acceptance of Automated Road Transport Systems.” Transportation Research Part F: Traffic Psychology and Behaviour 50: 55–64. doi:10.1016/j.trf.2017.07.007.
- Merat, N., and Y. Barnard. Technology Acceptance by car drivers over the age of 70. Human Factors and Ergonomics Society Europe Chapter 2010.
- Merat, N., T. Louw, R. Madigan, M. Wilbrink, and A. Schieben. 2018. “What Externally Presented Information Do VRUs Require When Interacting with Fully Automated Road Transport Systems in Shared Space?” Accident; Analysis and Prevention 118: 244–252. doi:10.1016/j.aap.2018.03.018.
- Mokhtarian, P.L., and I. Salomon. 2001. “How Derived is the Demand for Travel? Some Conceptual and Measurement Considerations.” Transportation Research Part A: Policy and Practice 35 (8): 695–719. doi:10.1016/S0965-8564(00)00013-6.
- Nazari, F., M. Noruzoliaee, and A.K. Mohammadian. 2018. “Shared versus Private Mobility: Modeling Public Interest in Autonomous Vehicles Accounting for Latent Attitudes.” Transportation Research Part C: Emerging Technologies 97: 456–477. doi:10.1016/j.trc.2018.11.005.
- Nielsen, T. A. S., and S. Haustein. 2018. “On Sceptics and Enthusiasts: What Are the Expectations towards Self-Driving Cars?.” Transport Policy 66: 49–55. doi:10.1016/j.tranpol.2018.03.004.
- Nordfjærn, T., H.B. Lind, Ö. Şimşekoğlu, S.H. Jørgensen, I.O. Lund, and T. Rundmo. 2015. “Habitual, Safety and Security Factors Related to Mode Use on Two Types of Travels among Urban Norwegians.” Safety Science 76: 151–159. doi:10.1016/j.ssci.2015.03.001.
- Nordhoff, S., J. De Winter, W. Payre, B. Van Arem, and R. Happee. 2019. “What Impressions Do Users Have after a Ride in an Automated Shuttle? An Interview Study.” Transportation Research Part F: Traffic Psychology and Behaviour 63: 252–269. doi:10.1016/j.trf.2019.04.009.
- Nordhoff, S., M. Kyriakidis, B. Van Arem, and R. Happee. 2019. “A Multi-Level Model on Automated Vehicle Acceptance (MAVA): a Review-Based Study.” Theoretical Issues in Ergonomics Science 20 (6): 682–710. doi:10.1080/1463922X.2019.1621406.
- Nordhoff, S., V. Malmsten, B. Van Arem, and R. Happee. (Under Review). A structural equation modelling approach for acceptance of driverless automated vehicles based on constructs from the Unified Theory of Acceptance of Use of Technology and the Diffusion of Innovation Theory.
- Panagiotopoulos, I., and G. Dimitrakopoulos. 2018. “An Empirical Investigation on Consumers' Intentions towards Autonomous Driving.” Transportation Research Part C: Emerging Technologies 95: 773–784. doi:10.1016/j.trc.2018.08.013.
- Pettigrew, S., L.M. Dana, and R. Norman. 2019. “Clusters of Potential Autonomous Vehicles Users according to Their Propensity to Use Individual versus Shared Vehicles.” Transport Policy 76: 13–20. doi:10.1016/j.tranpol.2019.01.010.
- Pudāne, B., M. Rataj, E. J. E. Molin, N. Mouter, S. Van Cranenburgh, and C.G. Chorus. 2019. “How Will Automated Vehicles Shape Users' Daily Activities? Insights from Focus Groups with Commuters in The Netherlands.” Transportation Research Part D: Transport and Environment 71: 222–235. doi:10.1016/j.trd.2018.11.014.
- Raykov, T., and G.A. Marcoulides. 2006. A First Course in Structural Equation Modelling (2nd ed.). Mahwah, NJ, US: Lawrence Erlbaum Publishers.
- Redman, L., M. Friman, T. Gärling, and T. Hartig. 2013. “Quality Attributes of Public Transport That Attract Car Users: A Research Review.” Transport Policy 25: 119–127. doi:10.1016/j.tranpol.2012.11.005.
- Rosseel, Y. 2012. “Lavaan: An R Package for Structural Equation Modeling.” Journal of Statistical Software 48 (2): 1–36. doi:10.18637/jss.v048.i02.
- Salomon, I., and P.L. Mokhtarian. 1997. “Coping with Congestion: Understanding the Gap between Policy Assumptions and Behaviour.” Transportation Research Part D: Transport and Environment 2 (2): 107–123. doi:10.1016/S1361-9209(97)00003-5.
- Soteropoulos, A., M. Berger, and F. Ciari. 2019. “Impacts of Automated Vehicles on Travel Behavior and Land Use: An International Review of Modelling Studies.” Transport Reviews 39 (1): 29–49. doi:10.1080/01441647.2018.1523253.
- Schafer, J., and J. Graham. 2002. “Missing Data: our View of the State of the Art.” Psychological Methods 7 (2): 147–177.
- Schreiber, J.B., A. Nora, F.K. Stage, E.A. Barlow, and J. King. 2006. “Reporting Structural Equation Modeling and Confirmatory Factor Analysis Results: A Review.” The Journal of Educational Research 99 (6): 323–338. doi:10.3200/JOER.99.6.323-338.
- Shabanpour, R., S. N. D. Mousavi, N. Golshani, J. Auld, and A. Mohammadian. 2017. “Consumer Preferences of Electric and Automated Vehicles.” In Proceedings of the 5th IEEE International Conference on Models and Technologies for Intelligent Transportation Systems, MT–ITS 2017, 716–720. IEEE, Naples, Italy, June
- Stocker, A., and S. Shaheen. 2019. “Shared Automated Vehicle (SAV) Pilots and Automated Vehicle Policy in the U.S.: Current and Future Developments.” In Road Vehicle Automation 5, edited by G. Meyer and S. Beiker, 131–147. Springer, Cham.
- Sparrow, R., and M. Howard. 2017. “When Human Beings Are like Drunk Robots: Driverless Vehicles, Ethics, and the Future of Transport.” Transportation Research Part C: Emerging Technologies 80: 206–215. doi:10.1016/j.trc.2017.04.014.
- Steg, L. 2005. “Car Use: lust and Must. Instrumental, Symbolic and Affective Motives for Car Use.” Transportation Research Part A: Policy and Practice 39: 147–162.
- Tennant, C., S. Stares, and S. Howard. 2019. “Public Discomfort at the Prospect of Autonomous Vehicles: Building on Previous Surveys to Measure Attitudes in 11 Countries.” Transportation Research Part F: Traffic Psychology and Behaviour 64: 98–118. doi:10.1016/j.trf.2019.04.017.
- Teo, T., and J. Noyes. 2011. “An Assessment of the Influence of Perceived Enjoyment and Attitude on the Intention to Use Technology among Pre-Service Teachers: A Structural Equation Modeling Approach.” Computers & Education 57 (2): 1645–1653. doi:10.1016/j.compedu.2011.03.002.
- Tertoolen, G., D. Van Kreveld, and B. Verstraten. 1998. “Psychological Resistance against Attempts to Reduce Private Car Use.” Transportation Research Part A: Policy and Practice 32: 171–181.
- Tubaishat, A. 2017. “Perceived Usefulness and Perceived Ease of Use of Electronic Health Records among Nurses: Application of Technology Acceptance Model.” Informatics for Health & Social Care 43 (4): 379–389. doi:10.1080/17538157.2017.1363761.
- Venkatesh, V., and F.D. Davis. 2000. “A Theoretical Extension of the Technology Acceptance Model: four Longitudinal Field Studies.” Management Science 46 (2): 186–204. doi:10.1287/mnsc.46.2.186.11926.
- Venkatesh, V., M.G. Morris, G.B. Davis, and F.D. Davis. 2003. “User Acceptance of Information Technology: Toward a Unified View.” MIS Quarterly 27: 425–478.
- Venkatesh, V., J. Y. L. Thong, and X. Xu. 2012. “Consumer Acceptance and Use of Information Technology: extending the Unified Theory of Acceptance and Use of Technology.” MIS Quarterly 36: 157–178. doi:10.2307/41410412.
- Wanous, J.P., A.E. Reichers, and M.J. Hudy. 1997. “Overall Job Satisfaction: How Good Are Single-Item Measures?” The Journal of Applied Psychology 82 (2): 247–252. doi:10.1037/0021-9010.82.2.247.
- Welch, S. 2015. University of Leeds Travel Survey. https://carparking.leeds.ac.uk/wp-content/uploads/2015/07/2015-Travel-Survey-Report.pdf.
- Wu, J., H. Liao, J.W. Wang, and T. Chen. 2019. “The Role of Environmental Concern in the Public Acceptance of Autonomous Electric Vehicles: A Survey from China.” Transportation Research Part F: Traffic Psychology and Behaviour 60: 37–46. doi:10.1016/j.trf.2018.09.029.
- Xu, Z., K. Zhang, H. Min, Z. Wang, X. Zhao, and P. Liu. 2018. “What Drives People to Accept Automated Vehicles? Findings from a Field Experiment.” Transportation Research Part C: Emerging Technologies 95: 320–334. doi:10.1016/j.trc.2018.07.024.
- Yap, M.D., G. Correira, and B. Van Arem. 2015. “Valuation of Travel Attributes for Using Automated Vehicles as Egress Transport of Multimodal Train Trips.” Transportation Research Part A: Policy and Practice 94: 1–16.
- Younes, B. 1995. “The Benefits of Improving Public Transport: A Myth or Reality?.” Transport Reviews 15 (4): 333–356. doi:10.1080/01441649508716924.
- Zhang, T., D. Tao, X. Qu, X. Zhang, R. Lin, and W. Zhang. 2019. “The Roles of Initial Trust and Perceived Risk in Public's Acceptance of Automated Vehicles.” Transportation Research Part C: Emerging Technologies 98: 207–220. doi:10.1016/j.trc.2018.11.018.
- Zoellick, J.C., A. Kuhlmey, L. Schenk, D. Schindel, and S. Blüher. 2019. “Assessing Acceptance of Electric Automated Vehicles after Exposure in a Realistic Traffic Environment.” PLoS ONE 14 (5): e0215969. doi:10.1371/journal.pone.0215969.
- Zmud, J., and I.N. Sener. 2017. “Towards an Understanding of the Travel Behavior Impact of Autonomous Vehicles.” Transportation Research Procedia 25: 2500–2519. doi:10.1016/j.trpro.2017.05.281.