
Abstract
In this paper, we propose a hybrid approach for the rapid mapping of landslides, based on automatic thresholding using panchromatic (PAN) images as data sources. The new approach is a combination of image differencing, a multistage local thresholding strategy, and a newly developed directional recursive method. Firstly, the Otsu method has been selected to calculate the global threshold of the entire residual image and the image is repeatedly segmented into sub-images with a growing window size. Secondly, the resulting sub-images are categorized into three types (balanced, background-dominated, and object-dominated) according to the histogram of global and local image information. Thirdly, sub-images of different types are binarized respectively by using different schemes of the proposed directional recursive method. Finally, the individual results in each running step are integrated and the entire image is binarized. The proposed approach has been tested for rapid detection of landslides induced by the Wenchuan earthquake in Beichuan County, China. Results show that almost all of the landslides are properly detected including the low-contrast ones, which cannot be identified neither by the original Otsu method nor the change detection algorithm within ERDAS software.
1. Introduction
Fast detection of landslides is essential for rapid damage assessment and emergency response in disaster management activities. Several lines of studies (e.g. Guzzetti et al. Citation2005, Citation2006; Chang, Chiang, and Hsu Citation2007; van Westen, Castellanos, and Kuriakose Citation2008; Bălteanu et al. Citation2010) have indicated that landslide mapping plays a very important role for landslide-related research because these maps, showing landslides from regions to states or nations, are the preliminary step toward landslide susceptibility, hazard, and risk assessment to quantitatively estimate both temporary and spatial landslide occurrence for setting up long-term landslide management strategies.
Traditionally, visual interpretation of stereoscopic aerial photographs and field survey were the primary tools for landslide detection. However, these manual methods are experience-based and meanwhile tedious and expensive. With the increasingly finer spatial and spectral resolution of satellite imagery, as well as improvements in computer hardware, automatic remote-sensing technologies have been widely used for landslide detection (e.g. Hervás et al. Citation2003; Cheng, Wei, and Chang Citation2004; Barlow, Franklin, and Martin Citation2006; Booth, Roering, and Perron Citation2009; Martha et al. Citation2010; Cigna et al. Citation2011; Li, Chen, et al. Citation2013). However, in some cases, only panchromatic (PAN) images are available for a disaster event (van Westen, Castellanos, and Kuriakose Citation2008; van Westen and Lulie Getahun Citation2003). When time-series PAN images are available, change detection is a commonly used method that has been applied widely for the identification of earth surface features (Coppin et al. Citation2004; Lu et al. Citation2004; Savagea et al. Citation2012; Li, Lu, et al. Citation2013; Li, Im, and Beier Citation2013; Rossi, Rogan, and Schneider Citation2013; Gordon, Crews-Meyer, and Famiglietti Citation2004; Peneva-Reed Citation2014) and also can be effectively applied for landslide detection (Hervás et al. Citation2003; Nichol and Wong Citation2005; Lu et al. Citation2011; Mondini, Chang, and Yin Citation2011; Martha et al. Citation2012). The basic principle using pre- and post-PAN images for landslide detection is the increased spectral value in brightness of the area affected by landslide due to loss of vegetation and exposure of fresh soil and rock. Meanwhile, because green plants and bare ground show significantly different reflection in the visible channel, it makes it easy to distinguish vegetation areas from landslides by a given spectral threshold. Thus automatic thresholding can be selected as an important method for PAN image segmentation and inspection of landslides.
Thresholding aims to calculate an optimal threshold value for separating objects of interest in an image from the background based on their grey-level distribution. Many thresholding algorithms have been proposed and implemented during the last two decades (Zahara, Fan, and Tsai Citation2005; Ng Citation2006; Hammouche, Diaf, and Siarry Citation2008; Im, Lu, and Jensen Citation2011), each based on a different rationale. It is common to classify the thresholding algorithms into two groups: global and local methods. Global thresholding tries to find a single threshold for the entire image, whereas local thresholding calculates multiple threshold values based on the localized-level information obtained from a sub-image with certain size, or certain reference domain within the used image. Global thresholding is simpler and easier to implement but its result relies on good (uniform) illumination. Moreover, a fixed threshold level, no matter how well chosen, cannot be appropriate in cases of uneven background and poor illumination (Yanowitz and Bruckstein Citation1989). Local thresholding methods can deal with non-uniform illumination but they are complicated and slow (Ng Citation2006). Besides, the sub-image size for local approach seriously influents the segmentation results (Wu and Amin Citation2003).
Among the global thresholding techniques, the Otsu method has been proven to be an efficient method for thresholding an image with a bimodal distribution of histogram (Sahoo, Soltani, and Wong Citation1988; Poletti et al. Citation2012). This method tries to calculate threshold values that maximize between-class variances of the image histogram. It is optimal for thresholding a histogram with bimodal or multimodal distribution; however, it fails if the histogram is unimodal or close to unimodal. For the task of landslide detection, the adopted PAN images always cover a wide range of landscape, which implies that detection applications involve no object to small and large objects, and the grey-level distributions should approximate unimodal or bimodal. As a result, to successfully detect objects especially for a PAN image cover large area, the Otsu method needs to be revised so that it can handle both unimodal and bimodal distributions equally well.
Therefore, in this study, a hybrid approach which integrates the advantages of both global and local thresholding for rapid mapping of landslides from archived high-resolution PAN images is presented. An automatic multistage thresholding strategy is proposed to detect different landslides with largely varied grey levels concerning uneven illumination and low contrast. The entire image is repeatedly divided into sub-images with a growing window size, each sub-image is automatically computed by the schemes defined in the proposed directional recursive method, according to both global and local spectral information. The individual results in each running step are integrated and the entire image is binarized. The new proposed approach has been tested to detect landslides induced by the Wenchuan earthquake, and the aftershocks and following rainstorm. The approach performs well and shows its capability in interpreting landslides. In addition, it is simple and fast in data processing, making it useful for emergency management after a major event such as a strong earthquake or a heavy rainfall.
2. Automatic thresholding algorithm selection
2.1. The selection of change detection technique
The commonly used change detection techniques include image differencing, principal component analysis, change vector analysis and post-classification comparison (Lu et al. Citation2004). Among these, image differencing is the most widely used because it is straightforward and simple to implement and easy to interpret although it cannot label the results. This is why image differencing is selected for this study. The mathematical form can be written as
where DN1, DN2 are the digital number values of a pixel at the same location (i, j) of two time-series images, δ is the difference of the two images and T is the threshold for extracting the change areas. All pixels belonging to change areas are object (coded by 1), all pixels belonging to non-change areas are background (coded by 0).
Equation (2) demonstrates that a key point for image differencing is to determine the threshold T to differentiate change (object) and non-change (background) areas.
2.2. Problems of existed thresholding algorithms
Many thresholding algorithms have been proposed and implemented based on different rationale. It is common to classify the thresholding algorithms into two groups: global and local methods. Global thresholding calculates a threshold for the entire image, while local thresholding calculates different thresholds for different regions of the image.
Previous studies have stressed two common conclusions. (1) Local thresholding generally preforms better than global thresholding due to its implicit capability of adapting to the background variation. (2) Compared to other global thresholding algorithms, the widely referred Otsu method is recommended because several lines of studies have elucidated its satisfactory performance (e.g. Sahoo, Soltani, and Wong Citation1988; Poletti et al. Citation2012).
2.2.1. The Otsu method
The Otsu method (Citation1979) is a clustering-based automatic thresholding algorithm. It represents one of the best global techniques and measures region homogeneity by variance. The bilevel thresholding operation is regarded as partitioning the pixels of an image into two classes and
by a given threshold value t.
and
are the objects and background classes, respectively. The maximum of between-class variance
yields the least overlap of two classes and the most proper separation.
shows an example of applying the Otsu method to detect changes after a landslide event. is an aerial image downloaded from Google Earth, containing a landslide which occurred near the Sichuan-Tibet Highway in 2006. It was difficult to investigate in situ in a timely fashion because of the bad geographic environment.
Figure 1. The Otsu method correctly classifies the image with bimodel distribution of histogram. TOtsu is the calculated threshold by using Otsu method, σb is standard deviation, HBackground is the histogram of background and Hobject is the histogram of object.
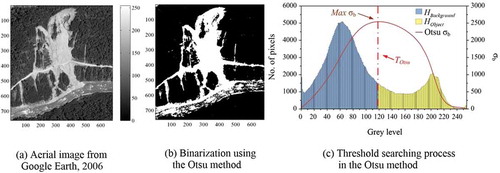
Results show that changed areas can be properly extracted by using the Otsu method as shown in , although some post-processing is required to eliminate the non-landslide areas with increased brightness due to land-cover changes such as roads and dammed lakes. shows the searching process using the original Otsu method.
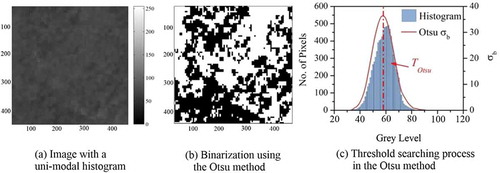
The advantage of the Otsu method is that it is parameter-independent and does not depend on modelling the probability density function. However, the drawback is also obvious, i.e. that it intuitively assumes a bimodal distribution of the image histogram as shown in . If the image approximately fits this constraint, it will achieve satisfactory results. Otherwise, it may incorrectly classify the image when the histogram is unimodal or close to unimodal () as shows.
Figure 2. Limitation of the Otsu method when dealing with unimodal images.
2.2.2. Local thresholding algorithm
As a global thresholding algorithm, the Otsu method does not work well when image contains highly variable illumination and the classes with conspicuously sizes (Hou, Hu, and Nowinski Citation2006; Medina-Carnicer and Madrid-Cuevas Citation2008). However, for landslide detection, remote-sensing images generally cover a huge area and different landslides are mainly presented by different grey levels. In other words, the histograms of landslide images sometimes approximate unimodal or multimodal. It is difficult to find an exclusive threshold to identify all the landslides in the differencing residual image.
Thus, local thresholding might outperform global methods. However, a limitation of local thresholding methods is that it only determines the local threshold for each small region of the entire image, missing some important overall features. As shown in , the non-landslide areas are incorrectly extracted without consideration of the entire image. Although global thresholding algorithms fail to fit the spatially changing background and lighting intensity, they present approximate information of the entire image and, in this context, be useful for finding local thresholds.
Figure 3. Misclassification using local thresholding without considering the overall features of entire image.
Another limitation of local thresholding methods is that local information is implicitly blurred to the dimensions of sub-images. It is clear that we cannot reduce the window size too much like a pixel since that would lead to over-segmentation and the algorithm will be sensitive to noise. On the other hand, if the selected size of each sub-image is too large, local approach would have no difference to global approach. In general, a better-fit window size should be related to the size of the objects of interest in the image. Unfortunately, since object size information is not often known as a priori, it is difficult to determine an optimal window size with respect to object dimensions.
2.2.3. Multistage thresholding algorithm
For the mentioned reasons, multistage thresholding techniques have been developed and applied in the literature for segmenting images by using local thresholding with different criteria (e.g. Solihin and Leedham Citation1999; Yan, Zhang, and Kube Citation2005). Generally, in stage 1, these methods use global thresholding algorithms to find a threshold for entire image. Meanwhile, the entire image is segmented into sub-images with a fixed size, and local intensity and contrast are calculated within each sub-image. Then in stage 2, sub-images are classified into three classes: objects, background, and undetermined. The undetermined class is segmented against a threshold value by specified criteria as a revision of the global threshold using local information. By these methods, after stage 1, some sub-images are simply determined as background defined by the global threshold.
2.2.4. The directional recursion Otsu method
Cheriet, Said, and Suen (Citation1998) proposed a recursive thresholding algorithm for image segmentation based on the Otsu method. They use the Otsu method to threshold the object image through removing the background repeatedly until the given condition satisfied. However, Xu et al. (Citation2011) indicated that when the variance of the object or background is larger, the Otsu threshold value will bias toward the object or background, respectively. For this reason, some parts of objects may be initially misclassified as background and the algorithm by Cheriet, Said, and Suen (Citation1998) is limited when the sub-image is object dominated.
2.3. Proposed hybrid thresholding approach
Following the work done by Cheriet, Said, and Suen (Citation1998) and Xu et al. (Citation2011), we improve the identification of objects of interest to our study, i.e. the landslides and background, by combining a multistage thresholding method with a local threshold referencing the global thresholding results and a recursive algorithm.
In order to demonstrate the characteristics of sub-images, we first define some parameters. An image can be represented by a histogram of grey-level intensity function f(x). The value of f(x) is with grey level ranging from 0 to L-1, where L is the number of distinct grey levels. The number of pixels at level i is defined by ni, and the total number of pixels is defined by n. The grey-level histogram is normalized and regarded as the probability of occurrence of level i:
The general histogram of an image can be described as . If an initial value of T is given by using a global threshold, sub-images can be classified into three types as shown in .
Figure 4. Definitions in histogram distribution. Notation min and max are the lower and upper bound of grey level, respectively; T is the threshold, by which the image can be divided into background (blue region) and object (yellow region). ht is the number of pixels at T; hb and ho are the largest number of pixels in background and objects distribution, respectively.
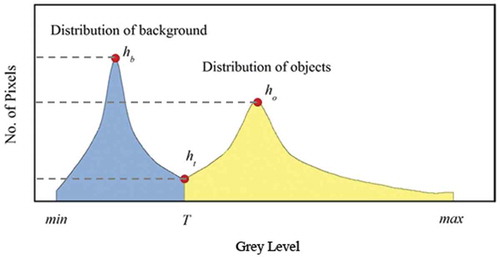
Figure 5. Classification of sub-images with the assistance of global threshold. TGlobal is the global Otsu threshold of entire image, and TLocal is the local threshold of sub-image.
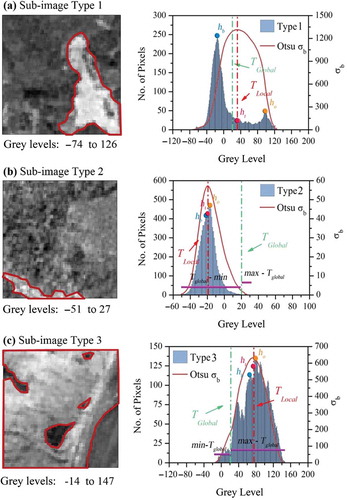
Type 1 is the balanced bimodal class, which has
It can be properly segmented by an exclusive threshold using the original Otsu method ().
Type 2 is the case where the sub-image is mainly composed of background defined by the global threshold T. The histogram of this type is generally a unimodal or unbalanced bimodal shape with a small portion of objects. This condition is defined by
Type 3 is the opposite case of type 2, where the sub-image is mainly composed of objects defined by the global threshold T. This condition is defined by
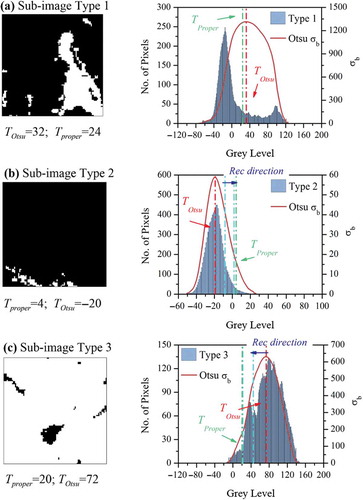
According to the classification of sub-images by global threshold and local information, we propose a directional recursive Otsu method to find the optimal thresholds for types 2 and 3. The detection diagram is shown in . The initial recursion requires to decide the recursion orientation by the type of sub-image; then, if the sub-image is type 2 (background dominates), an initial Otsu threshold is computed and a new image with one background (the darkest) being thresholded is produced. The background region is excluded in the given image and the process of histogramming and thresholding in the Otsu method is recursively repeated, moving the local threshold from the initial Otsu threshold to a greater one (); if the sub-image is type 3 (object dominates), the opposite direction of recursion is adopted, i.e. that an initial object (the brightest) being thresholded by the initial threshold is produced. The object region is excluded in the given image and the process of the Otsu method is recursively repeated, moving the local threshold from the initial one to the left side (). The recursive repeating terminates until one of the following condition reaches:
Figure 6. A directional recursion Otsu method to find proper thresholds for different sub-image types.
which means the recursion image has been formed in an approximate bimodal histogram shape and is properly segmented by the original Otsu method. We obtain
which means that there are no more abundant background pixels or objects which should be removed in the recursive process. The new algorithm has been implemented and validated on all the three types of sub-images. The segmentation results are shown in ; sub-images of all types can be efficiently and effectively binarized.
Figure 7. Proper detection results using the new proposed thresholding strategy. TOstu denotes the local threshold (and also the initial threshold used in the proposed recursion method) by the Otsu method, and Tproper denotes the local threshold by the proposed recursion method.
3. Proposed approach for landslide detection
The proposed thresholding algorithm in Section 2.3 is used to determine the threshold for landslide detection. The detailed procedure is illustrated in .
Figure 8. Landslide detection procedure using the proposed approach. DN and β denote the digital number and accumulative digital number of a pixel, respectively. Details are illustrated in Section 3.2.3.
3.1. Pre-processing
Pre-processing, including co-registration and radiometric correction, is very important when using change detection technology for mapping landslides. They directly affect the detection accuracy of change information between different temporal imageries. Because the images are taken at different times, some noise may be generated by the atmosphere or the effects of different data (e.g. the images may be taken in different seasons or in different times of the day) and view angles. Thus it is necessary to pay attention to how to minimize the effects of different environmental conditions.
3.2. Multistage thresholding and image segmentation
Based on the new proposed multistage thresholding strategy and the directional recursion Otsu method, repeated image segmentation with a gradually growing window size is conducted and the thresholding process is shown as follows.
3.2.1. Global thresholding
Global thresholding is applied to find a preliminary threshold value T1. The Otsu method is chosen because it is an effective scheme and has been recommended as one of the most proper global thresholding algorithms. The threshold value T1 is used to classify the sub-images but not to segment the entire image.
3.2.2. Image segmentation and determining local thresholds of sub-images
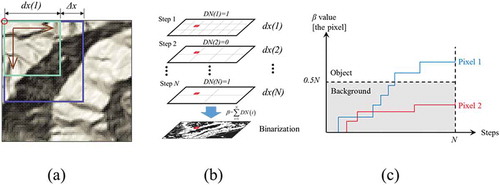
Several lines of studies have elucidated that persistence of background noise and window size in the image segmentation significantly influence the detection results of objects (Park Citation2001). However, finding a predefined window size is still a major issue and somewhat a difficult task. Recent work done by Boiangiu et al. (Citation2011) presented a method, in which the window size gradually grows to generate a better binarization result. In this paper, analogous algorithm is developed. Instead of using one predefined value, the window size starts from a user-defined small value dx(1) and gradually grows with a certain increment Δx (). The computation runs N times and subsequently N sets of binarization results will be obtained. In each running step, the entire image is segmented into sub-images with fixed size dx×dx, and the local information of each sub-image is calculated separately. Considering both local histogram information and global threshold after image segmentation, each sub-image is classified into one of three classes: (a) balanced, (b) background-dominated by TGlobal and (c) object-dominated by TGlobal (as illustrated in ).
Figure 9. Illustration of the image segmentation. (a) Expanding the window size from a user-defined value dx(1) with an increment Δx. Notation DN records digital number of the pixel in each individual step (DN = 1 when the pixel belongs to object, and 0 when belonging to background); (b) Accumulative digital number β is computed by integrating N times of binarization; (c) The pixel belongs to object if the accumulative digital number β is greater than 0.5N.
3.2.3. Image binarization
As illustrated in Section 2.3, local thresholds of each sub-images are computed based on the types they belong to. The balanced type is segmented by the original Otsu method. The background-dominated and object-dominated types are segmented by the new proposed directional recursive Otsu method. Recursion terminates until the condition of Equation (7) or Equation (8) reaches. Following the procedure, in each running step, the entire image is binarized using the local thresholds of sub-images. N times of computation consequently results N times of binarization of the entire image with different window sizes.
However, binarization in each individual running step i cannot be directly used to detect the objects (landslides). On the one hand, boundary effect arisen by the discontinuous of grey levels at the boundary of two neighbour sub-images somewhat affects the binarization results. It requires a smooth transition for each boundary formed in the segmentation process. On the other hand, persistence of background noise also influences the detection of objects. In consideration of these two reasons, we concurrently take into account the binarization results from N times of computation to reduce the influence of boundary effect and background noise.
As illustrated by , the binarized results of each running step are integrated. In each running step, objective pixels are coded by 1 and background pixels are coded by 0. Notation DN(i) is used to record the digital number of each pixel at the running step i. The computation runs N steps, and all the resulting binarization images are combined. For each individual pixel, it is judged by
where β is the accumulative digital number of each pixel, N is the total running step, and i is the current running step. Binarization coefficient 0.5N in Equation (10) denotes that the pixel should belong to object if it is detected as object by more than 50% of the running steps. For instance, in , if β value of pixel 1 is greater than 0.5N, it is identified as the object. An explicit benefit by the usage of β value is that the boundary effect is weakened because the boundary of sub-image changes in each running step. Meanwhile, background noise can be filtered accompanying with the increase of window size.
3.3. Post-processing
After differentiating the change and non-change areas, some post-processing procedures are needed because the objective of this study is to detect landslides. However, the change areas include not only landslides but also other areas such as build-up areas or landslide dams.
The binarization results can be improved by incorporating other data sources, methods, or human expertise. See Section 4.2 for a detailed procedure of this step.
4. Case study and accuracy assessment
The performance of the proposed approach has been tested to detect landslides induced by the Wenchuan earthquake and the following aftershock and heavy rainfall, using PAN images.
4.1. Study area and data source
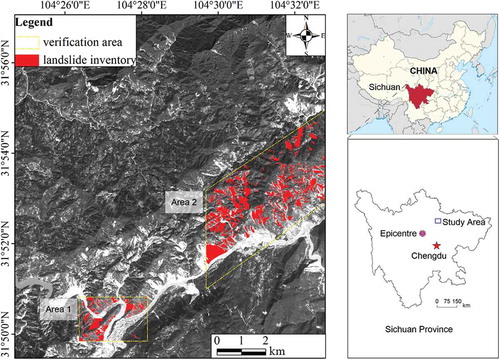
The study area is situated about 138 km northeast of the Wenchuan earthquake epicentre, Beichuan County, Sichuan Province, China. This area is located at the main fault rupture zone and experiences high seismic shaking levels. The Yingxiu-Beichuan fault, which dominated the Wenchuan earthquake, goes through the southeastern portion of the study area. A large number of various kinds of landslides occurred here due to the Wenchuan earthquake and the following heavy rainfall 4 months later (Tang et al. Citation2011).
The available data utilized in this work include (1) a 10 × 10 m grid digital elevation model (DEM) before the Wenchuan Earthquake, which was made through interpolation of contour lines from a 1:50,000 topographic vector map provided by China Geological Survey in 2001. (2) Two images, an IRS-P5 image taken on 28 January 2007 before the Wenchuan earthquake, and a PAN SPOT5 image taken on 24 September 2008 after the 23–24 September rainstorm event. (3) Some aerial photographs taken by the Ministry of Land and Resources after the earthquake. All the data have already been pre-processed when they are available, thus detailed description on this part is omitted in this study. The IRS-P5 image and SPOT5 image are resampled in 3 m × 3 m resolution. Because the aerial photographs only cover part of the PAN images, a portion of manually drawn landslide inventory (area 1 and area 2, as shown in ), which is described in polygon format from a stereoscopic visual interpretation of aerial photographs, can be used for the following accuracy verification. We used the same criteria commonly adopted by geomorphologists to identify landslides, including visual analysis and heuristic interpretation of the shape, size, colour, texture and tone, shown on the aerial photographs (Fiorucci et al. Citation2011).
Figure 10. SPOT5 image shows location of the study area. Yellow polygons (area 1 and area 2) show landslide inventory mapping interpreted from the aerial photographs. The two areas are used to illustrate the performance of the approach.
4.2. Results
4.2.1. Extraction of change information
Automatic mapping for landslide detection is carried out by using the proposed approach. The initial window size of the sub-images is predefined as dx = 50 pixels and grows gradually with increment Δx = 10 pixels. The computation runs 60 times (N = 60), and the window size increases from 50 pixels to 640 pixels. The binarization results of each running step are integrated to compute the DN and β values. shows the β value of each pixel in the entire image. The greater the β value is, the more likelihood of being object the pixel will be. Red regions denote the object, whereas blue regions denotes the background. The colourful region between the red and blue regions indicates grey zone, i.e. that the pixel is identified as the object in some running steps, while in the other running steps it is identified as the background. This kind of pixel can be finally binarized by a manipulated value (here 0.5N is adopted). shows the final binarization as segmented by β = 0.5N = 30, which implies that a pixel will be identified as object if it is detected by more than half of the computations. Automatic thresholding result in demonstrates that the growing window size significantly weakens the boundary effect by image segmentation.
Figure 11. Automatic thresholding result from the proposed approach. (a) β value of each pixel, as computed by the integration of the binarization results in each running step; (b) Final binarization as segmented by β = 0.5N = 30.
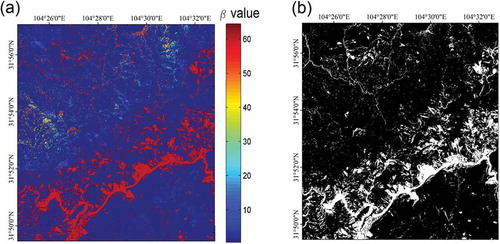
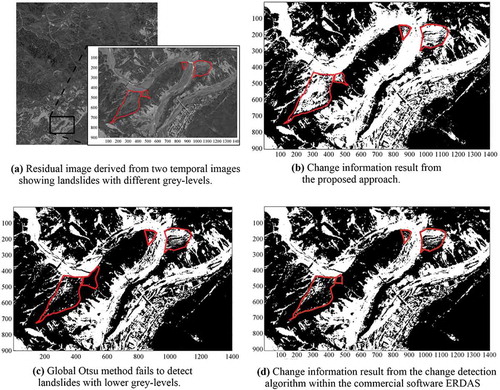
Furthermore, shows that most of the vegetation areas are classified as background by the proposed thresholding method, which depletes a majority of noise in the image; only some urban areas are left for further post-processing analysis. To continue the analysis through a clear view, we focus on the zoom area (area 1) in , which displays an enlarged sight of the residual image by image differencing derived from the time-series images. shows the binarization result of the zoom area using the proposed approach, and and d shows the binarization results using the global Otsu method and change detection algorithm within the commercial software ERDAS, respectively. It can be found that objects identified for the changed land cover mainly consist of landslides, river, and human constructions; almost all of the objects with high grey levels can be detected by the approaches. However, when comparing this with the results from the global Otsu method () and ERDAS software (), it can be found that the landslides with lower grey levels (denoted by red polygons) undetected by the other approaches are properly detected by using the proposed approach. It indicates an advantage of the proposed approach that it is capable of detecting landslides even the non-illumination ones using PAN images.
Figure 12. Comparison the binarization results using different approaches. Red polygons denote the low grey-level landslides. (a) Zoom area used for comparison; (b) Binarization by the proposed approach; (c) Binarization by the global Otsu method; (d) Binarization by the change detection algorithm within ERDAS.
4.2.2. Extraction of landslides
Image binarization after change detection algorithm automatically filters most of the vegetation areas, and it is beneficial to post-processing for landslide extraction. Nevertheless, because the change information not only resulted from landslides, but also from other areas like rivers, residential areas or dammed lakes, post-processing to remove non-landslide areas is still required.
In this paper, (1) according to Tang et al. (Citation2011), most of the landslides in the study area occurred when the slope gradient is larger than 10°. Thus, when combining with a slope gradient layer derived from an image using DEM within ArcGIS9.3, some plain areas were eliminated by a filter with slope gradient greater than 10°; (2) an existing river layer is used to remove river areas; and (3) the procedure of sieving and clumping (so-called salt and pepper effect) is carried out to remove isolated pixels. Then some non-landslide areas, including build-up areas, river and noise, are eliminated. The final landslide detection result is shown in .
Figure 13. Landslide detection result after post-processing; river and build-up areas are filtered by a slope filter.
4.2.3. Accuracy assessment
Because the existing landslide inventory mapping interpreted from aerial photographs covers a portion of the study area, a compromise is made that two small areas are selected (area 1 and area 2, which coincide with the aerial photographs covering area) in to verify the proposed approach. The landslide inventory map includes 151 landslides in area 1 and 326 landslides in area 2, which portrays the main geomorphological features caused by the Wenchuan earthquake and the following rainfall in the studied catchment. Through a intersect function in ArcGIS9.3, it can be seen that most of the landslide areas, including the lower grey-level ones, are well detected by the proposed approach.
Figure 14. Landslide verification through comparing with the landslide inventory map.
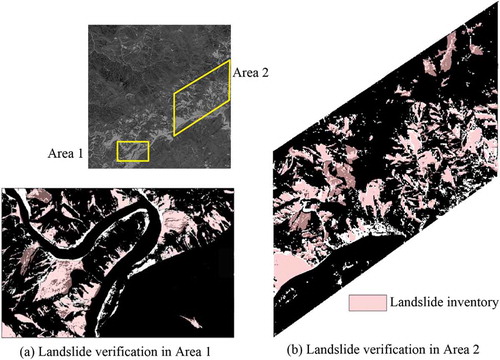
It is shown in that the automatically detected landslide areas are commonly larger than that in the manually interpreted map. This can be explained in part that the detected landslides include some false alarms, i.e. landslide identified by the proposed approach but not present in the inventory map. When checked on the SPOT image, most of them are actually dammed river. In addition, most sediment deposits are above 10° and cannot be filtered by a slope filter in the post-processing procedure. Although few false alarms exist, the overlapped landslide area between the automatic detection result and manually inventory is accounted to 96% in area 1 and 93% in area 2 ( and ).
5. Discussion
Recognition and mapping of landslides triggered by a single natural event (e.g. intense rainfall, earthquake, and rapid snowmelt) is an important but difficult, uncertain, time-consuming, and resource-demanding task (Guzzetti et al. Citation2006). We have tested the possibility of using PAN satellite images to conduct automatic detection of landslides. The results are satisfactory; however, some limitations should be considered when applying the method.
A major limitation is regarding image segmentation. Window size of sub-images is an important issue and is difficult to determine. The novelty of the proposed approach rests on the algorithm of growing window size; that the integration of results in each running step can weaken the accompanying problem of boundary effect and background noise. However, the algorithm at the current stage is still not perfect. On the one hand, the initial window size dx and size increment Δx should be empirically tuned. On the other hand, when integrating the individual result and binarizing the entire image, the algorithm encounters another manipulated coefficient 0.5N, which denotes that object will be identified if it is detected by more than 50% of the running steps. Although a trial-and-error adjustment is instrumental, a further discussion on this aspect is required.
Another limitation of the proposed approach is referred to the labelling of the identified objects. The proposed approach binarizes the entire image, and spectral-changed land covers are confounded in the objects. Distinguishing landslides from the objects is definitely required. In general, vegetation and bare ground show highly different reflection in spectral intensity, which makes it easy to distinguish vegetation areas from bare ground, and the post-processing procedure becomes easier because vegetation accounts for most parts of a PAN image. For residential areas, it is easy to remove most of the pain areas using a slope filter. And stream channel can be easily filtered by using a river layer. A case study for landslide detection is carried out in Beichuan County after the Wenchuan earthquake. Although results show a high accuracy by comparing the overlapped area between automatic detection and landslide inventory map, some false alarms still exist. The false alarms are especially from sediment deposits in dammed rivers. It is because most of the sediment deposits are above 10°, a slope filler cannot remove them completely. However, since sediment deposits are likely to become source materials for debris flow and lead to secondary disasters, it is believed that the detected landslides and sediment deposits can be considered together for hazard mitigation.
6. Conclusions
Sometimes PAN images are the only data available to interpret objects after a disaster event due to their high resolution and low cost. In this study, a hybrid approach is proposed for automatic thresholding by using PAN images. The approach consists of global thresholding, a multistage local thresholding strategy, and a newly developed directional recursive method.
The PAN images used for landslide detection can be characterized as being of intensity-variant and unevenly illuminated. Rather than a global thresholding approach, local thresholding allows different threshold values and then can adapt to the variations. For local thresholding, the binarization result is implicitly blurred to the dimensions of sub-image size. In this study, we proposed a multistage algorithm with growing window size that the individual results in each running step are integrated and the entire image is binarized. A benefit of the proposed approach can be found that the boundary effect of sub-images and background noise is significantly weakened. To illustrate its performance, the new proposed approach has been tested in the detection of landslides induced by the Wenchuan earthquake and the ones induced by the following aftershocks and rainstorm. A satisfactory accuracy can be found by comparing the results with that of a manually interpreted inventory. Additionally, the proposed method appears to be a sound technique for automatic thresholding, especially when the images are complicated with uneven illumination.
The proposed algorithm does not need any prior knowledge about the image other than the grey-level histogram itself. The technique is able to select optimal threshold values for images with both unimodal and bimodal histogram distribution. Besides, the implemented process is simple and fast. Therefore, the proposed method is suitable for landslide mapping immediately after a disaster event. However, limitations regarding the initial parameters and classification of the identified objects are discussed and need to be addressed further.
Funding
This study has received financial support from the Kyushu University Interdisciplinary Programs in Education and Projects in Research Development. Also, this work was supported by JSPS KAKENHI [grant number 22310113] and the Global Environment Research Found of Japan (S-8). These financial supports are gratefully acknowledged.
References
- Bălteanu, D., V. Chendeş, M. Sima, and P. Enciu. 2010. “A Country-Wide Spatial Assessment of Landslide Susceptibility in Romania.” Geomorphology 124: 102–112. doi:10.1016/j.geomorph.2010.03.005.
- Barlow, J., S. Franklin, and Y. Martin. 2006. “High Spatial Resolution Satellite Imagery, DEM Derivatives, and Image Segmentation for the Detection of Mass Wasting Processes.” Photogrammetric Engineering and Remote Sensing 72: 687–692. doi:10.14358/PERS.72.6.687.
- Boiangiu, C. A., A. Olteanu, A. Stefanescu, D. Rosner, N. Tapus, and M. Andreica. 2011. “Local Thresholding Algorithm Based on Variable Window Size Statistics.” Proceedings of the 18th International Conference on Control Systems and Computer Science, Bucharest, May 24–27.
- Booth, A. M., J. J. Roering, and J. T. Perron. 2009. “Automated Landslide Mapping Using Spectral Analysis and High-Resolution Topographic Data: Puget Sound Lowlands, Washington, and Portland Hills, Oregon.” Geomorphology 109: 132–147. doi:10.1016/j.geomorph.2009.02.027.
- Chang, K., S. Chiang, and M. Hsu. 2007. “Modeling Typhoon- and Earthquake-Induced Landslides in a Mountainous Watershed Using Logistic Regression.” Geomorphology 89: 335–347. doi:10.1016/j.geomorph.2006.12.011.
- Cheng, K. S., C. Wei, and S. C. Chang. 2004. “Locating Landslides Using Multi-Temporal Satellite Images.” Advances in Space Research 33: 296–301. doi:10.1016/S0273-1177(03)00471-X.
- Cheriet, M., J. N. Said, and C. Y. Suen. 1998. “A Recursive Thresholding Technique for Image Segmentation.” IEEE Transactions on Image Processing 7 (6): 918–921. doi:10.1109/83.679444.
- Cigna, F., C. Del Ventisette, V. Liguori, and N. Casagli. 2011. “Advanced Radar-Interpretation of Insar Time Series for Mapping and Characterization of Geological Processes.” Natural Hazards and Earth System Sciences 11 (3): 865–881. doi:10.5194/nhess-11-865-2011.
- Coppin, P., I. Jonckheere, K. Nackaerts, B. Muys, and E. Lambin. 2004. “Review ArticleDigital Change Detection Methods in Ecosystem Monitoring: A Review.” International Journal of Remote Sensing 25: 1565–1596. doi:10.1080/0143116031000101675.
- Fiorucci, F., M. Cardinali, R. Carlà, M. Rossi, A. C. Mondini, L. Santurri, F. Ardizzone, and F. Guzzetti. 2011. “Seasonal Landslide Mapping and Estimation of Landslide Mobilization Rates Using Aerial and Satellite Images.” Geomorphology 129: 59–70. doi:10.1016/j.geomorph.2011.01.013.
- Gordon, W. S., K. A. Crews-Meyer, and J. S. Famiglietti. 2004. “Assessing Land Cover Change in Hydro-Climatic Data Network Watersheds Using NALC Imagery.” GIScience & Remote Sensing 41 (4): 322–346. doi:10.2747/1548-1603.41.4.322.
- Guzzetti, F., P. Reichenbach, F. Ardizzone, M. Cardinali, and M. Galli. 2006. “Estimating the Quality of Landslide Susceptibility Models.” Geomorphology 81: 166–184. doi:10.1016/j.geomorph.2006.04.007.
- Guzzetti, F., P. Reichenbach, M. Cardinali, M. Galli, and F. Ardizzone. 2005. “Probabilistic Landslide Hazard Assessment at the Basin Scale.” Geomorphology 72: 272–299. doi:10.1016/j.geomorph.2005.06.002.
- Hammouche, K., M. Diaf, and P. Siarry. 2008. “A Multilevel Automatic Thresholding Method Based on A Genetic Algorithm for A Fast Image Segmentation.” Computer Vision and Image Understanding 109 (2): 163–175. doi:10.1016/j.cviu.2007.09.001.
- Hervás, J., J. I. Barredo, P. L. Rosin, A. Pasuto, F. Mantovani, and S. Silvano. 2003. “Monitoring Landslides from Optical Remotely Sensed Imagery: The Case History of Tessina Landslide, Italy.” Geomorphology 54: 63–75. doi:10.1016/S0169-555X(03)00056-4.
- Hou, Z., Q. Hu, and W. L. Nowinski. 2006. “On Minimum Variance Thresholding.” Pattern Recognition Letters 27 (14): 1732–1743. doi:10.1016/j.patrec.2006.04.012.
- Im, J., Z. Lu, and J. R. Jensen. 2011. “A Genetic Algorithm Approach to Moving Threshold Optimization for Binary Change Detection.” Photogrammetric Engineering & Remote Sensing 77 (2): 167–180. doi:10.14358/PERS.77.2.167.
- Li, G., D. Lu, E. Moran, and S. Hetrick. 2013. “Mapping Impervious Surface Area in the Brazilian Amazon Using Landsat Imagery.” GIScience & Remote Sensing 50 (2): 172–183.
- Li, M., J. Im, and C. Beier. 2013. “Machine Learning Approaches for Forest Classification and Change Analysis Using Multi-Temporal Landsat TM Images over Huntington Wildlife Forest.” GIScience & Remote Sensing 50 (4): 361–384.
- Li, Y. G., G. Q. Chen, B. Wang, L. Zheng, Y. B. Zhang, and C. Tang. 2013. “A New Approach of Combining Aerial Photography with Satellite Imagery for Landslide Detection.” Natural Hazards 66 (2): 649–669. doi:10.1007/s11069-012-0505-x.
- Lu, D., P. Mausel, E. Brondízio, and E. Moran. 2004. “Change Detection Techniques.” International Journal of Remote Sensing 25: 2365–2401. doi:10.1080/0143116031000139863.
- Lu, P., A. Stumpf, N. Kerle, and N. Casagli. 2011. “Object-Oriented Change Detection for Landslide Rapid Mapping.” IEEE Geoscience and Remote Sensing Letters 8 (4): 701–705. doi:10.1109/LGRS.2010.2101045.
- Martha, T. R., N. Kerle, V. Jetten, C. J. van Westen, and K. V. Kumar. 2010. “Characterising Spectral, Spatial and Morphometric Properties of Landslides for Semi-Automatic Detection Using Object-Oriented Methods.” Geomorphology 116: 24–36. doi:10.1016/j.geomorph.2009.10.004.
- Martha, T. R., N. Kerle, C. J. van Westen, V. Jetten, and K. Vinod Kumar. 2012. “Object-Oriented Analysis of Multi-Temporal Panchromatic Images for Creation of Historical Landslide Inventories.” ISPRS Journal of Photogrammetry and Remote Sensing 67: 105–119. doi:10.1016/j.isprsjprs.2011.11.004.
- Medina-Carnicer, R., and F. J. Madrid-Cuevas. 2008. “Unimodal Thresholding for Edge Detection.” Pattern Recognition 41 (7): 2337–2346. doi:10.1016/j.patcog.2007.12.007.
- Mondini, A. C., K. T. Chang, and H. Y. Yin. 2011. “Combining Multiple Change Detection Indices for Mapping Landslides Triggered by Typhoons.” Geomorphology 134: 440–451. doi:10.1016/j.geomorph.2011.07.021.
- Ng, H.-F. 2006. “Automatic Thresholding for Defect Detection.” Pattern Recognition Letters 27 (14): 1644–1649. doi:10.1016/j.patrec.2006.03.009.
- Nichol, J., and M. S. Wong. 2005. “Satellite Remote Sensing for Detailed Landslide Inventories Using Change Detection and Image Fusion.” International Journal of Remote Sensing 26 (9): 1913–1926. doi:10.1080/01431160512331314047.
- Otsu, N. 1979. “A Threshold Selection Method from Gray-Level Histograms.” IEEE Transactions on Systems, Man and Cybernetics 9 (1): 62–66. doi:10.1109/TSMC.1979.4310076.
- Park, Y. 2001. “Shape-Resolving Local Thresholding for Object Detection.” Pattern Recognition Letters 22: 883–890. doi:10.1016/S0167-8655(01)00034-4.
- Peneva-Reed, E. 2014. “Understanding Land-Cover Change Dynamics of a Mangrove Ecosystem at the Village Level in Krabi Province, Thailand, Using Landsat Data.” GIScience & Remote Sensing 51 (4): 403–426.
- Poletti, E., F. Zappelli, A. Ruggeri, and E. Grisan. 2012. “A Review of Thresholding Strategies Applied to Human Chromosome Segmentation.” Computer Methods and Programs in Biomedicine 108 (2): 679–688. doi:10.1016/j.cmpb.2011.12.003.
- Rossi, E., J. Rogan, and L. Schneider. 2013. “Mapping Forest Damage in Northern Nicaragua after Hurricane Felix (2007) Using MODIS Enhanced Vegetation Index Data.” GIScience & Remote Sensing 50 (4): 385–399.
- Sahoo, P. K., S. Soltani, and A. K. C. Wong. 1988. “A Survey of Thresholding Techniques.” Computer Vision, Graphics, and Image Processing 41: 233–260. doi:10.1016/0734-189X(88)90022-9.
- Savagea, S. L., R. L. Lawrencea, S. G. Custera, J. T. Jewetta, S. L. Powella, and J. A. Shaw. 2012. “Analyzing Change in Yellowstone’s Terrestrial Emittance with Landsat Imagery.” GIScience & Remote Sensing 49 (3): 317–345. doi:10.2747/1548-1603.49.3.317.
- Solihin, Y., and C. Leedham. 1999. “Integral Ratio: A New Class of Global Thresholding Techniques for Handwriting Images.” IEEE Transactions on Pattern Analysis and Machine Intelligence 21 (8): 761–768. doi:10.1109/34.784289.
- Tang, C., J. Zhu, X. Qi, and J. Ding. 2011. “Landslides Induced by the Wenchuan Earthquake and the Subsequent Strong Rainfall Event: A Case Study in the Beichuan Area of China.” Engineering Geology 122: 22–33. doi:10.1016/j.enggeo.2011.03.013.
- van Westen, C. J., E. Castellanos, and S. L. Kuriakose. 2008. “Spatial Data for Landslide Susceptibility, Hazard, and Vulnerability Assessment: An Overview.” Engineering Geology 102 (3–4): 112–131. doi:10.1016/j.enggeo.2008.03.010.
- van Westen, C. J., and F. Lulie Getahun. 2003. “Analyzing the Evolution of the Tessina Landslide Using Aerial Photographs and Digital Elevation Models.” Geomorphology 54: 77–89. doi:10.1016/S0169-555X(03)00057-6.
- Wu, S., and A. Amin. 2003. “Automatic Thresholding of Gray-Level Using Multi-Stage Approach.” Proceedings of the Seventh International Conference on Document Analysis and Recognition, Edinburgh, August 3–6.
- Xu, X., S. Xu, L. Jin, and E. Song. 2011. “Characteristic Analysis of Otsu Threshold and Its Applications.” Pattern Recognition Letters 32 (7): 956–961. doi:10.1016/j.patrec.2011.01.021.
- Yan, F., H. Zhang, and C. R. Kube. 2005. “A Multistage Adaptive Thresholding Method.” Pattern Recognition Letters 26 (8): 1183–1191. doi:10.1016/j.patrec.2004.11.003.
- Yanowitz, S. D., and A. M. Bruckstein. 1989. “A New Method for Image Segmentation.” Computer Vision, Graphics, and Image Processing 46: 82–95. doi:10.1016/S0734-189X(89)80017-9.
- Zahara, E., S. K. S. Fan, and D. M. Tsai. 2005. “Optimal Multi-Thresholding Using a Hybrid Optimization Approach.” Pattern Recognition Letters 26: 1082–1095. doi:10.1016/j.patrec.2004.10.003.