
Abstract
Moderate Resolution Imaging Spectro-radiometer (MODIS) time-series Normalized Differential Vegetation Index (NDVI) products are regularly used for vegetation monitoring missions and climate change analysis. However, satellite observation is affected by the atmospheric condition, cloud state and shadows introducing noise in the data. MODIS state flag helps in understanding pixel quality but overestimates the noise and hence its usability requires further scrutiny. This study has analyzed MODIS MOD09A1 annual data set over Sri Lanka. The study presents a simple and effective noise mapping method which integrates four state flag parameters (i.e. cloud state, cloud shadow, cirrus detected, and internal cloud algorithm flag) to estimate Cloud Possibility Index (CPI). Usability of CPI is analyzed along with NDVI for noise elimination. Then the gaps generated due to noise elimination are reconstructed and performance of the reconstruction model is assessed over simulated data with five different levels of random gaps (10–50%) and four different statistical measures (i.e. Root mean square error, mean absolute error, mean bias error, and mean absolute percentage error). The sample-based analysis over homogeneous and heterogeneous pixels have revealed that CPI-based noise elimination has increased the detection accuracy of number of growing cycle from 45–60% to 85–95% in vegetated regions. The study cautions that usage of time-series NDVI data without proper cloud correction mechanism would result in wrong estimation about spatial distribution and intensity of drought, and in our study 50% of area is wrongly reported to be under drought though there was no major drought in 2014.
1. Introduction
In the past two decades, usage of time-series satellite data has increased manifold due to coherent and long-term archival data being freely available at a high temporal resolution across the globe (Erasmi, Bothe, and Petta Citation2006; Hamandawana, Eckardt, and Chanda Citation2005). The time-series data is used for studying global to local-level changes in the terrestrial vegetation (Brown et al. Citation2008; Jakubauskas, Legates, and Kastens Citation2002; Jeganathan, Dash, and Atkinson Citation2014; Reed Citation2006; Tadesse et al. Citation2010; Tian et al. Citation2015; Zhang et al. Citation2003). Among the many time-series data, NDVI product from Advanced Very High Resolution Radiometer (AVHRR) (Eastman et al. Citation2013; Heumann et al. Citation2007; Luo et al. Citation2013; Wang and Tenhunen Citation2004) and Moderate Resolution Imaging Spectro-radiometer (MODIS) (Beck et al. Citation2006; Luo et al. Citation2013; Zhang et al. Citation2003) have been utilized extensively to understand the vegetation dynamics (Jeganathan and Nishant Citation2014; Sakamoto et al. Citation2010; Zhang et al. Citation2003) in response to climatic fluctuation, drought impact (Ji and Peters Citation2003) as well as human activity. Recently, number of studies using time-series NDVI for regional drought monitoring has increased and they contributed in understanding spatiotemporal dynamics of drought events such as intensity, duration, and spatial coverage (Ghaleb, Mario, and Sandra Citation2015).
However, atmospheric condition, cloud and shadow, and bidirectional effect introduces noise and degrades the data quality (Atkinson et al. Citation2012; De Oliveira, Epiphanio, and Rennó Citation2014; Jia et al. Citation2011; Roy et al. Citation2002). The abnormality in NDVI values with irregular data gaps limits the accurate estimation of terrestrial dynamics (Michishita et al. Citation2014). Numerous studies have successfully experimented several noise reduction and smoothing techniques, including 4253H filter (Velleman Citation1980), Savitzky-Golay filter (Chen et al. Citation2004; Jönsson and Eklundh Citation2004; Savitzky and Golay Citation1964), Weighted least square regression approach (Swets et al. Citation1999), Asymmetric Gaussian (Jonsson and Eklundh Citation2002; Jönsson and Eklundh Citation2004), Whittaker smoother (Atzberger and Eilers Citation2011), Double logistic (Beck et al. Citation2006; Zhang et al. Citation2003), Best slope index Condition (Lovell and Graetz Citation2001; Viovy, Arino, and Belward Citation1992), Harmonic analysis (Bradley et al. Citation2007), Discrete Fourier transformation (Atkinson et al. Citation2012; Bradley et al. Citation2007; Brooks et al. Citation2012; Jeganathan, Dash, and Atkinson Citation2010; McCloy and Lucht Citation2004; Roerink, Menenti, and Verhoef Citation2000), Wavelet transformation (Chen et al. Citation2011; Lu et al. Citation2007; Sakamoto et al. Citation2010), Mean value iteration (Ma and Veroustraete Citation2006), Window regression-based approach (De Oliveira, Epiphanio, and Rennó Citation2014), and spatiotemporal interpolation (Cho and Suh Citation2013; De Oliveira and Epiphanio Citation2012; Poggio, Gimona, and Brown Citation2012; Weiss et al. Citation2014). However, only in few studies the MODIS quality flag is utilized prior to smoothing. MODIS provides composite-wise quality information at each pixel for 1-km and 250-m VI products, and two different quality information (i.e. quality assessment flag and state flag) for 500-m surface reflectance product. The state quality flag mainly contains cloud and associated noise information of a pixel. However, studies found that there is an inherent uncertainty in the quality flag and hence the pixel marked as low or high quality need to be considered with caution (De Oliveira, Epiphanio, and Rennó Citation2014; Grogan and Fensholt Citation2013; Hilker et al. Citation2012). More recently, De Oliveira, Epiphanio, and Rennó (Citation2014) used a spatiotemporal window regression-based condition, where the noisy value identified using MODIS quality information is replaced by the neighboring pixel value having lowest temporal variance. However, using the spatial window-based model, estimation of the correct value is always difficult for the pixel having heterogeneous land cover in the neighborhood (especially due to coarser spatial resolution). In addition, cloud masking process generates data gaps in the time-series and hence gap filling is an important step in the reconstruction process. Kandasamy et al. (Citation2013) studied 8 different gap filling techniques and found that local temporal window-based techniques performed better in eliminating gaps than the global techniques (which utilizes whole time-series) but they could not eliminate long gaps.
Therefore, the present study attempts to test the noise detection ability of MODIS quality flag and to develop simple, robust, and reproducible approaches to identify and eliminate the cloud-induced noise and gaps in time-series NDVI. The study is carried out over Sri Lanka which receives two rainy seasons: Yala (December to March) and Maha (May to September), and hence remote sensing data are highly affected by cloud cover. Therefore, removal of cloud noise from time-series RS data is a necessity for environmental applications.
2. Methodology
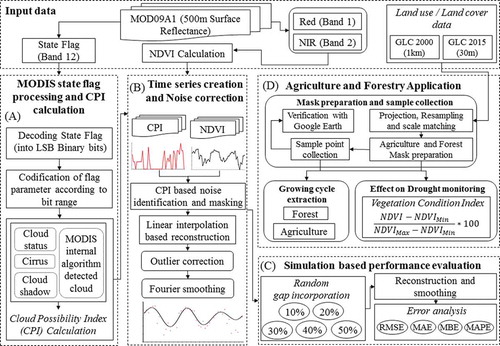
In this study, surface reflectance (RED and Near Infrared [NIR] bands) and state flag data (MOD09A1-V5) of on-board MODIS Terra sensor (500-m spatial resolution and 8-day temporal resolution) are used as main input data. Two horizontally successive tiles (h25v08 and h26v08) covering full Sri Lanka are downloaded for 14 years (2001 to 2014). All the experiments are carried out over one year (2014) data, and all the 14 years of data are used to derive long-term statistics for drought application. User needs to compute the NDVI using RED and NIR bands, and there is no maximum value composited NDVI product available at 500-m spatial resolution. Therefore, two additional flags for quality information (i.e. Quality Assessment [QA] flag and state flag) are provided to allow the user to explore on their own. In addition, Global Land Cover (GLC2000) (Bartholomé and Belward Citation2005) (1-km resolution) is used to identify various forest and agriculture classes, and Global Land Cover map (Chen et al. Citation2015) derived using 30-m Landsat data (GLC30) is used as a reference to identify homogeneous and heterogeneous sample pixels and to evaluate the results over forested and agriculture regions. provides the overall methodology followed in this study. The whole study is divided into four parts to achieve the objective. First, cloud information from the MODIS 500-m state flag is integrated to derive a cloud possibility index (CPI). Second, CPI and NDVI values are analyzed together for noise identification and elimination. Third, carrying out gap filling and performance evaluation of gap reduction method. Finally, evaluation of performance of the whole approach is carried out for two different applications: vegetation growth information extraction and drought assessment.
Figure 1. Overall methodology of the study. For full colour versions of the figures in this paper, please see the online version.
2.1. Cloud possibility index
MODIS Land (MODLAND) science team provides pixel-wise quality assurance data for each composite. The MOD09A1 Science Data Set contains 12 bands, including two quality-related data: (a) surface reflectance quality band; and (b) state flags (16 bit) band. The surface reflectance quality band (band 8) provides overall pixel reliability information and band-wise pixel reliability assessment parameter, whereas, the state flag (band 12) provides information about the nature of noise such as cloud, cloud shadow, aerosol quantity, cirrus, bidirectional reflectance distribution function etc. The qualitative noise parameter is represented by binary codification which is encoded into integer format. The user needs to decode it into a little endian binary format to obtain proper bit-wise information (Vermote, Kotchenova, and Ray Citation2015).
Therefore, appropriate bit combinations are used to extract multiple quality parameter, and each parameter is converted into a separate band. In this study, we have used four cloud related parameter i.e. Cloud State, Cloud Shadow, Cirrus detected, and MODIS cloud flag parameter. Each parameter contains further subcategories representing the degree of noise information. We have integrated these four parameters through a rating ()-based weighted sum process (i.e. parameters are rated first and then summed) and created a CPI to quantitatively assess noise intensity in a pixel. The details about bit information, parameters, rating and attribute details are provided in for ready reference to the readers.
Table 1. Attribute class rating in MODIS 500-m state flag (16 bit).
2.2. Noise elimination and reconstruction
2.2.1. CPI- and NDVI-based noise detection
The bands 1 and 2 (MOD09A1) representing the surface reflectance information in RED and NIR wavelength regions are used to compute NDVI for all the composites, and an annual time-series stack of NDVI (46 composites) is created covering January to December months in 2014. Similarly, CPI is computed for all the 46 composites and an annual CPI time-series stack is created.
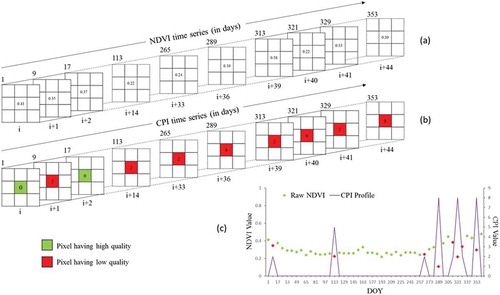
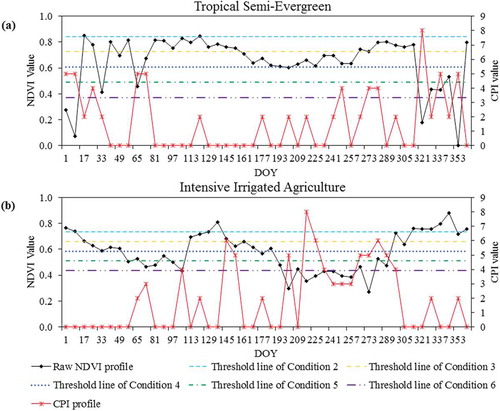
illustrates the conceptual relationship between the time-series NDVI value and CPI value (as an example case). The low-quality pixel (marked in red color in and ) in a composite is characterized by the higher CPI value. The higher CPI value and corresponding lower NDVI value depicts the inverse relationship between cloud-induced noise and NDVI value. In , the major noise (CPI ≥2) could be observed in 8 composites out of 46 composites (one-year time-series). The lower NDVI value in 40th and 44th composite () having CPI = 8 reveals that magnitude of NDVI value is inversely dependent on the amount of noise. Hence, we can identify noisy NDVI values with the assistance of the CPI value (Eqn. 1).
Figure 2. Graphical representation of time-series NDVI and CPI values extracted from MODIS 500 m data of 2014: (a) time-series NDVI, (b) time-series CPI, and (c) relationship between time-series NDVI and CPI values.
Where, is the CPI value of ith composite and
is the CPI threshold. However, due to uncertainty in the MODIS state flag this relationship between CPI and NDVI value is not always reliable (Letu et al. Citation2014). Therefore, to address this issue we have incorporated an additional NDVI-based condition (Equation 2) in addition to Equation (1) so as to identify and mask-out correct noisy NDVI value.
Where, CPIi is the CPI value at ith composite, CPIβ is the CPI threshold, NDVIi is the NDVI value at ith composite, is the annual mean NDVI,
is the standard deviation of annual time-series NDVI,
is the Threshold Controlling Factor (TCF) having value from −1 to +1 and N is the total number of NDVI composites. Five different values of TCF are tested in this study (). In this step, temporal neighbors are not considered.
Table 2. Six cloud noise detection conditions used in the study.
2.2.2. Gap filling and reconstruction of time-series NDVI
The gap filling and reconstruction approach consist of three major steps, i.e. (1) filling the gaps generated by the noise elimination process, (2) removing the local fluctuation using temporal moving window-based filter, and (3) generating smooth time-series data.
A temporal moving window-based technique is used to fill the gaps. For each pixel, all the Vegetation Index (VI) values at time “”
are checked for gaps, and a rate of change-based linear interpolation technique is used (Equations 5, 6, 7, and 8) to estimate the predicted NDVI value
. The advantage of this approach is that lengthy gap can also be filled.
The “” represents the rate of change in VI value between neighborhood time range:
Where,
Where, is the current composite time (in composite number);
is the timing of preceding non-noisy neighbor value;
is the timing of succeeding non-noisy neighbor value;
is the difference between non-noisy succeeding and preceding VI value; and
is the time difference (in terms of number of composites) between succeeding and preceding non-noisy value location. Annual cyclicity is assumed to maintain the continuity while searching for preceding or succeeding neighbors (for example, if the preceding neighbor is not found till the first composite then the search will continue from the last composite cyclically and vice versa for succeeding neighbors). In this regard, the difference in location and value is calculated by considering the total number of the time gap in the loop. However, the quality of the new data fully depends on the number of noisy or non-noisy values and the length of the gap in a temporal profile (Justice et al. Citation2002).
The local fluctuation or statistical outlier in NDVI values cannot be detected by using MODIS state flag alone (Letu et al. Citation2014). Hence, after filling the gaps, a statistical envelop-based filter is used to check for any possible local fluctuation. The upper and lower threshold limits are derived using mean and standard deviation of the two temporal neighbors on both sides of the current position (Eqn. 9).
Where,
and
Where, and
are the mean and standard deviation, respectively, of two previous and the two-successive neighborhood VI values, n is the window size (i.e. total number of neighbors),
is the VI value of the ith temporal band,
is the VI value of current time,
is the VI value at the previous immediate time and
is the VI value at the next immediate time.
Finally, harmonic-series-based Discrete Fourier Transformation (DFT) has been used for smoothing time-series NDVI data to facilitate automatic information extraction. The merit of DFT-based smoothing over other competitive technique is widely evaluated in Atkinson et al. (Citation2012) and utilized in Jeganathan, Dash, and Atkinson (Citation2010) and Dash, Jeganathan, and Atkinson (Citation2010) for vegetation growth monitoring. The DFT decomposes any complex time-series data into a series of simple waves of different frequency (i.e., harmonics), and inverse DFT using coefficients from lower order harmonics would result in smoothed annual data.
The Fourier Smoothing (FS) is based on the sum of sine and cosine functions that describes the periodic signal.
The equation consists of two parts: real or cosine part and imaginary or sine part.
The cosine part is:
The sine part is:
Where, is the VI value in the time-series,
is the mean annual VI,
is the harmonic component of Fourier transformation,
is the time of
and N is the length of the total time period (i.e. total number of composites). For a smooth reconstruction of annual time-series, consideration of the appropriate number of harmonics is very important. The first two harmonics can take into account about 50–90% of the variability in a time-series (Jakubauskas, Legates, and Kastens Citation2001). However, only two harmonics components do not reproduce reliable time-series. Therefore, four to six harmonics are usually recommended for correct identification of different land cover features, and to accurately identify various phenological metrics (e.g., the number of growing season, sowing and harvesting time, etc.) (Atkinson et al. Citation2012; Jeganathan, Dash, and Atkinson Citation2010).
2.3. Sensitivity test for the gap filling model
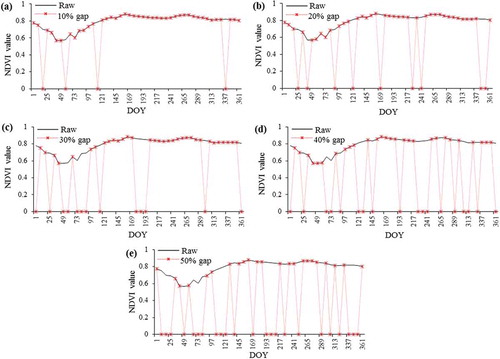
The sensitivity analysis of any reconstruction approach is important to evaluate performance of the model. However, the major problem is how to evaluate a reconstructed profile in the absence of error free data. Therefore, the sensitivity of the proposed gap filling model is evaluated based on Monte Carlo simulation as followed in Zhou et al. (Citation2012). During simulation, we have introduced artificial gaps at random locations in a time-series NDVI. Five different percentages (10%, 20%, 30%, 40%, and 50%) of random data gaps equivalent to dropouts of 4, 9, 13, and 18 composites, respectively, are tested over 100 different NDVI profiles (one sample profile is provided in ). Finally, the simulated datasets are reconstructed using proposed gap filling model.
Figure 3. Simulated annual NDVI profile having different percentages of random gaps: (a) 10%, (b) 20%, (c) 30%, (d) 40%, and (e) 50%
In order to quantitatively evaluate the performance, four different statistical measures i.e. root mean square Error (RMSE), mean absolute error (MAE), mean bias error (MBE), and mean absolute percentage error (MAPE) are used. RMSE is one of the traditional techniques used to describe the nature of the fit between predicted value and actual value in time-series (Musial, Verstraete, and Gobron Citation2011). The parameter “n” in the model represents a number of observations in a time-series.
According to Willmott and Matsuura (Citation2005), MAE is more reliable as it provides mean overall performance whereas RMSE represents the greater individual difference.
The MBE is more frequently used to assess whether the fitting of the model is overestimated (positively skewed) or underestimated (negatively skewed). MBE basically represents the mean value of residual:
MAPE is another performance evaluation technique which represents mean relative percentage error. The percentage representation of the error is the advantage for understanding over other technique when data is in different scales (De Oliveira, Epiphanio, and Rennó Citation2014).
Where, represents predicted value in ith composite,
represents observed value in ith composite.
2.4. Testing usability in regional applications
2.4.1. Vegetation growth parameter extraction
To evaluate the usability of reconstructed data, we tested all the results in terms of Number of Growth Cycle (NGC) in the pixels of natural (forest) and man-made vegetation (i.e. crops and plantation). First Derivative (FD)-based technique is used to detect timings of growth phenomena (Jeganathan, Dash, and Atkinson Citation2010). The FD is calculated by differentiating the immediate previous VI value from the current VI value. The annual cyclicity is assumed for calculating FD of the first composite, where the last value of the series is considered as the immediate previous VI value (vice versa for the last composite). For a particular growing cycle, a positive FD value represents the greening phase and a negative value represents the decaying phase. For natural vegetation, there will normally be only one growing cycle in a year. For agriculture, there may be one, two, or three growing cycles based on cropping intensity. In the case of agriculture, the minimum time difference between two cropping periods (between peaks) is at least 3 months (Kumar and Jeganathan Citation2016).
2.4.2. Drought monitoring
The quality of the reconstructed data is validated for its truthful representation of drought condition based on Vegetation Condition Index (VCI). Drought condition generally reduces the vegetation vigor which can be detected through VCI (Kogan Citation1995; Zambrano et al. Citation2016). VCI is calculated as per following formula:
Where, VCIijk is VCI value for pixel i in composite j of year k; NDVIijk, is NDVI value for pixel i in composite j of year k; NDVIijn is long-term minimum of NDVI value for pixel i in composite j and NDVIijx is long-term maximum of NDVI value for pixel i in composite j. It is important note here that VCI depends upon the long term NDVI statistics, and generally it is assumed that the pixel has same crop-type across years though it may not be the case. In case of crop-rotation VCI would wrongly estimate the vegetation stress condition and hence user needs to consider land cover information along with NDVI to correctly understand vegetation health (Yagci, Di, and Deng Citation2015). The current study has assumed a similar crop type scenario and crop-rotation effects are not analyzed as it is not the main focus of the study.
Finally, the vegetation parameters (NGC & VCI) (derived using cloud-corrected based on CPI and all TCFs and non-cloud corrected data i.e. without CPI) are checked for their matching accuracy in relation to the reference data from samples pixels (aggregated from 30 m land cover map) over homogeneous and heterogeneous areas of natural and man-made vegetation.
3. Results and discussion
3.1. MODIS state flag based cloud possibility index (CPI)
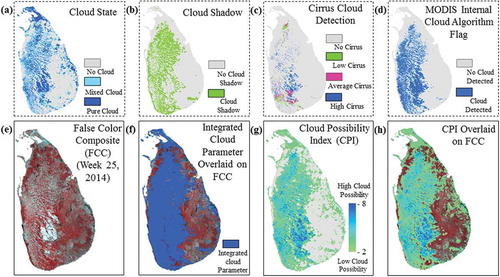
At first, the spatial distribution of different classes of four cloud-related parameters are created for all the composites. Example results for the 25th week in 2014 over Sri Lanka is provided in . One can see cloud related noise information in all four parameters (, , , ) and hence simply considering one parameter as a cloud mask would mislead. If all four-parameters are combined with equal consideration as a cloud () then it would only provide the major noise distribution but not the intensity. Therefore, each attribute class is rated () and then summed to derive Cloud Possibility Index (CPI) (). The value of CPI ranges between 0 and 8, where the value “0ʹ represents the no cloud or relatively high-quality pixel, and the value 8ʹ represents high cloud possibility or very low-quality pixel.” The distribution and concentration of cloud can be seen in the central region of Sri Lanka (). It can be seen in CPI () that majority of the area provides reliable cloud information when compared with False Colour Composite (FCC) ( and ).
Figure 4. Spatial distribution of cloud-related parameters over Sri Lanka (25th composite of h25v08 and h26v08 MODIS tiles).
3.2. Evaluation of CPI for noise identification
The simple CPI-based threshold (CPI ≥2) is expected to be effective to identify noisy NDVI value. However, in certain cases disagreement is observed as high NDVI values are also detected as high noise and vice versa due to uncertainty in MODIS quality flag which conforms the observation of the study carried out by Letu et al. (Citation2014). If those values are considered as noise, the annual profile pattern as well as growth cycle rhythm may be incorrectly extracted, and hence additional five different thresholds (Eqn. 2 and ) are evaluated to correctly identify the actual noisy value.
Depicts the graphical concept of threshold in different condition for natural vegetation () and agriculture (). For the natural vegetation (), the total number of noisy values (i.e. noise count) identified by the TBC 1 is 24 (around 50%) out of 46 input NDVI data points. However, when the NDVI threshold value decreased from high to low (from TBC 1 to TBC 6), the noise count has also gradually decreased from 24 to 4. For agriculture (), TBC 2 and TBC 3 are not helpful in noise reduction, as all the data fell within the threshold range. The condition having a lower threshold, i.e. TBC 5 and TBC 6 is found effective to remove major noisy NDVI value (i.e. lower NDVI value with CPI ≥ 2) correctly. However, any TCF threshold greater than 1 and less than −1 will provide result as same as TBC 1 or raw data.
Figure 5. Graphical example of different threshold level over (a) natural vegetation and (b) agriculture.
3.3. Effect of CPI based reconstruction on different land cover
The NDVI and CPI variations over different land cover features are studied further, and the land cover map (GLC2000) is used for this purpose. Four different vegetation classes (evergreen, semi-evergreen, moist deciduous and dry deciduous) and two agriculture classes (rain-fed crop [single growing cycle], intensive irrigated crop [double and triple growing cycle]) in Sri Lanka are also selected. To ensure the reliability of the chosen pixel, the GLC2000 data is verified with Google Earth image to avoid multi-class mixing area and the samples are collected in the middle of the homogeneous cluster. The higher CPI value is not necessarily related to true noise as the pattern and intensity of noise varies with land use and land cover type. provides the vegetation class-wise graphical illustration of seven smoothed time-series NDVI profiles (six smoothed profiles from six TBC-based reconstructed NDVI data and one smoothed profile based on raw NDVI data). All the seven-profiles has responded differently in terms of growth rhythm depending on the land use and land cover (LULC) class, magnitude of NDVI value, quantity and intensity of cloud noise (CPI value), and defined threshold. The smooth profile from raw NDVI data is compared with the other six profiles, and it has resulted in wrong estimation (e.g., having multiple growing cycles instead of a single growing cycle) of annual growth patterns in the cases of natural vegetation classes (tropical evergreen [], tropical semi-evergreen [], tropical moist deciduous [] and tropical dry deciduous []).
Figure 6. Raw NDVI and smoothed NDVI profile (based on different conditions) for (a) tropical dry evergreen forest, (b) tropical moist semi-evergreen forest, (c) tropical moist deciduous forest, (d) tropical dry deciduous forest, (e) rain-fed crop (single growing cycle), (f) intensive irrigated crop (double growing cycle), and (g) intensive irrigated crop (triple growing cycle).
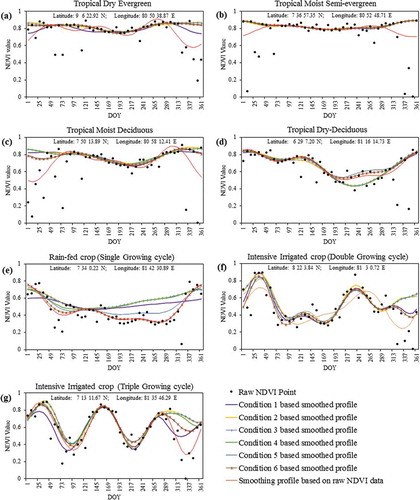
For natural vegetation, though all six conditions have provided reliable results in terms of annual vegetation growth pattern and annual growing cycle, TBC 3 [] based smoothing profile is observed as the most reliable (having single growing cycle and closely matching the non-noisy raw NDVI value) for all cases. However, for agriculture classes TBC 5 and 6 provides maximum agreement when compared with non-noisy raw NDVI value.
3.4. Simulation based performance evaluation of reconstruction model
Sample time-series NDVI data sets with different percentage of random data dropout (10%, 20%, 30%, 40%, and 50% of gaps) are created (i.e. 5 different sets each having 100 annual profiles) using a reference smoothed NDVI profile. Then these 500 profiles are reconstructed using Eqn. 5 and smoothed using DFT. Finally, RMSE, MAE, MBE and MAPE are calculated. provides the details about the different error measurements. illustrates the histogram of MBE error distribution from different % of data gaps. It can be observed that at each gap level the average RMSE, MAE, MBE and MAPE values obtained by the model is close to zero. Overall it is revealed that the proposed approach can be used to reconstruct time-series data in a reliable manner.
Table 3. Reconstruction model error statistics (RMSE, MAE, MBE, and MAPE) for five gap levels (10%, 20%, 30%, 40%, and 50%).
Figure 7. Mean bias error (MBE) distribution and error statistics from simulated annual profiles with (a) 10% gap, (b) 20% gap, (c) 30% gap, (d) 40% gap, and (e) 50% gap.
3.5. Regional applications
Annual growth rhythm of vegetation is characterized through time-series NDVI data. The biophysical and growth information such as biomass, timing of greening, browning and peak growth and stress in vigor can be extracted using time-series NDVI, but the reliability largely depends on the quality or number of non-noisy occurrence of NDVI value in a year. In this regard, the study wanted to test the appropriateness of the method for such thematic applications at a regional level.
3.5.1. Impact of cloud correction on vegetation growth
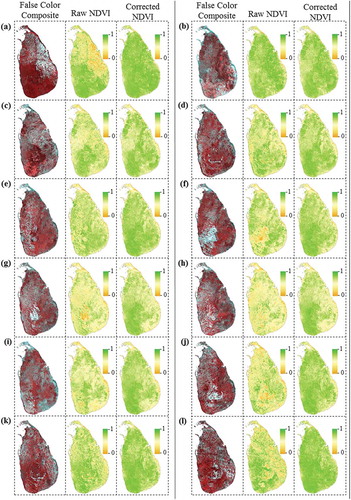
The graphical comparison of MODIS FCC (second week of each month), computed raw NDVI and TBC 3-based (as an example case) smoothed NDVI are shown in . Sri Lanka experiences two rainy season due to its geographical setup and as a consequence, cloud cover can be observed in most of the months (January [] to December []). The frequent cloud cover affects the data quality and as a result lower magnitude of NDVI value is observed in the cloud affected area.
Figure 8. Spatial distribution of MODIS FCC, raw NDVI and corrected NDVI (based on TBC 3) of different composites of different months: (a) 2nd (2nd week of January), (b) 6th (2nd week of February), (c) 10th (2nd week of March), (d) 14th (2nd week of April), (e) 17th (2nd week of May), (f) 21st (2nd week of June), (g) 25th (2nd week of July), (g) 29th (2nd week of August), (i) 33rd (2nd week of September), (j) 37th (2nd week of October), (k) 40th (2nd week of November), and (l) 44th composite (2nd week of December).
We have extracted information about the NGC for the year 2014 using all six conditions (using CPI & NDVI) as well as using raw NDVI data (i.e. without CPI-based noise correction). To evaluate the performance of different conditions over the forest and agricultural area, GLC30 LULC data is degraded (based on majority function) to 500 m first and then based on percentage of mixing (within 500 m × 500 m), we have selected samples of the heterogeneous and homogeneous core area. We have checked the accuracy of extracted NGC information based on (a) samples over heterogeneous cluster of natural vegetation (440 samples) and agriculture (200 samples), (b) samples over homogeneous clusters of natural vegetation (183 samples) and agriculture (186 samples). At each sample, we examined annual smoothed NDVI profile to identify the growing cycle information and labeled it accordingly, which is further considered as reference data. The results based on 6 different conditions (TBC 1 to TBC 6) are compared with reference sample data to evaluate their noise correction performance.
Generally, natural vegetation is characterized by a single growing cycle. The maximum percentage of correctly estimated single growing cycles under heterogeneous sample pixels is observed in TBC 3 (95.37%), TBC 2 (94.44%), and TBC 1 (93.75%) (). The highest percentage of correctly estimated single growing cycle is observed under homogeneous sample pixels in TBC 1 (98.36%), TBC 2 (96.17%), and TBC 3 (96.17%) (). The results using non-cloud corrected NDVI data has produced an agreement of 52.78% and 58.47% under heterogeneous and homogeneous locations, respectively. The spatial distribution of growing cycle information extracted from different conditions-based smoothed profile for natural vegetation and agriculture are presented in and , respectively.
Table 4. Sampling based performance evaluation of different TBCs results in estimating number of growth cycles in natural vegetation.
Figure 9. The spatial distribution of extracted growing cycle in forested region based on smoothed results from (a) TBC 1, (b) TBC 2, (c) TBC 3, (d) TBC 4, (e) TBC 5, (f) TBC 6, and (g) without CPI.
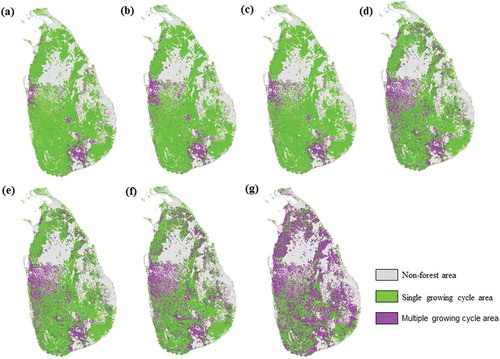
Figure 10. The spatial distribution of number of growing cycle in agricultural region based on smoothed results from (a) TBC 1, (b) TBC 2, (c) TBC 3, (d) TBC 4, (e) TBC 5, (f) TBC 6, and (g) without CPI.
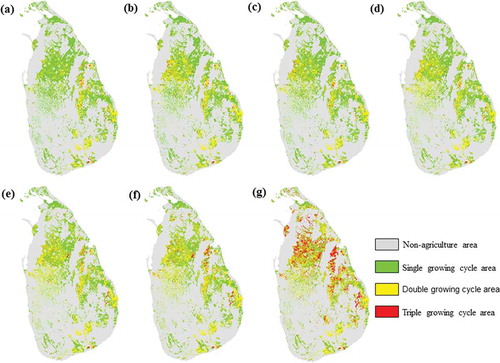
Rain-fed agriculture is characterized by single growing cycles as the water availability depends upon the rainy season whereas irrigated agriculture is characterized by single to multiple growing cycles due to water availability throughout the year. The maximum overall accuracy is observed in TBC 6 (87.5% and 81.18%) followed by TBC 5 (79% and 76.88%), and TBC 4 (78.5% and 72.58%) under heterogeneous and homogeneous sampling scheme, respectively ( and ). However, the least agreement is observed when raw NDVI (without using CPI) is used (62.5% for heterogeneous and 50.54% for homogeneous).
Table 5. Performance evaluation of different TBCs result based on number of growth cycles in heterogeneous agriculture samples.
Table 6. Performance evaluation of different TBCs result based on number of growth cycles in homogeneous agriculture samples.
Zhou et al. (Citation2012) has recommended different thresholds for different vegetation types. The findings from the current study also confirms that single threshold is not appropriate for noise reduction, and maximum accuracy is obtained only when different thresholds (i.e. TBC 2 and TBC 6) are used in the reconstruction process for natural vegetation and agriculture pixels.
3.5.2. Impact of cloud correction on drought monitoring
According to FAO (Citation2015) report, there was no drought during 2014–15 Maha season in Sri Lanka. But if we use noisy NDVI then it might reveal wrong drought condition. Hence, we wanted to test the results from drought perspective. To evaluate the impact of cloud correction (based on proposed approach) on agriculture drought monitoring, we have used TBC 6 (as it resulted in maximum accuracy) for noise elimination for all the 14-years (2001 to 2014) time-series NDVI data and VCI is computed for each 8-day composite from July to August in 2014. It is important to note that the lower values of VCI not always represent the drought scenario as it can also occur during onset and end of cropping season if seasonal shift in cropping happens over the time. And hence we used VCI only during crop growth period (2nd week of July 2014 to 3rd week of August 2014) as an example case for this discussion.
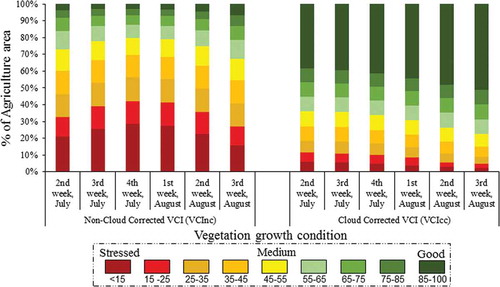
Cloud corrected and non-cloud corrected NDVI data are used to compute two different VCI (i.e. cloud corrected VCI termed as VCIcc and non-cloud corrected VCI termed as VCInc) for comparative evaluation purpose. Week-wise spatial distribution of VCIcc and VCInc over agriculture region of Sri Lanka is illustrated in , and one can see the consistent stress condition in VCInc based results whereas VCIcc shows normal correct growth condition. Finally, VCI values are grouped into nine different drought classes according to FAO (Citation2016). represents the class-wise percentage of agriculture area extracted using six continuous weeks VCIcc and VCInc data. As per VCInc data, more than 50% of agriculture area is found to be under severe drought during cropping season whereas there was no actual drought on ground, and the area estimated using VCIcc data has correctly revealed the healthy ground condition over 85% of the area. Observation from and clearly indicates that drought monitoring using non-cloud corrected NDVI would mislead drought quantification and hence affect decision-making especially at the crucial cropping period.
Figure 11. Spatial distribution of cloud corrected VCI and non-cloud corrected VCI over Sri Lanka for (a) 2nd week of July, (b) 3rd week of July, (c) 4th week of July, (d) 1st week of August, (e) 2nd week of August, and (f) 3rd week of August in 2014.
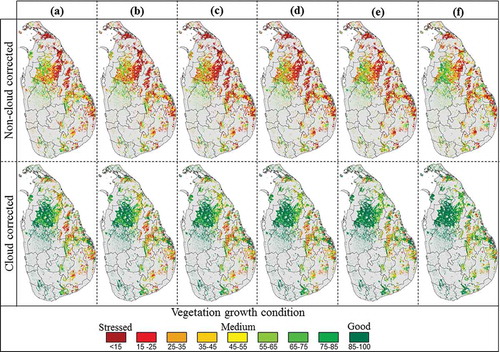
Figure 12. Class-wise % of agriculture area extracted using cloud-corrected VCI and non-cloud-corrected VCI over Sri Lanka for six continuous weeks from 2nd week of July to 3rd week of August, 2014.
4. Conclusion
The study has found that using the cloud-related parameters from MODIS state flag as absolute noise has resulted in overestimation of clouds. In this study, we have proposed and tested simple reproducible procedures to map cloud presence (CPI) based on MODIS quality parameters and to detect noise in NDVI time-series, and for gap filling and reconstruction procedure (before applying Fourier smoothening). The performance of the reconstruction model has been evaluated based on five different percentage levels (10%, 20%, 30%, 40%, and, 50%) of gap simulation, and the model is found to be effective based on four statistical error measures (i.e. RMSE, MAE, MBE, and MAPE).
The study has checked the usability of the approaches for vegetation phenology and drought applications. Under vegetation phenology, the study has tested the detection accuracy of all the TBCs for their correctness in revealing number of growing cycle information in natural vegetation (>90% accuracy) and agriculture area (>80% accuracy) based on 100 s of homogeneous and heterogeneous sample points. It is observed that utilizing CPI alone has improved the NGC detection accuracy from 50–60% to >90% in all the homogeneous natural vegetation, and from 45% to 87% in single-cropping area. However, for heterogeneous pixels, CPI alone is not enough to identify noise especially in the cases of double and triple cropping regions. Different TCF based additional checks have revealed that TBC 2 & 3 are better choice for noise elimination in natural vegetation, and TBC 5 & 6 for agriculture. The study also has analyzed the effect of different approaches for drought assessment during crop growing time (i.e. 2014 Maha season) in Sri Lanka. The total area falling under drought categories based on non-cloud corrected data is observed to be varying between 40 to 56% during crop growth period, and on the other hand results from cloud corrected data has correctly revealed the area between 9 and 18%. The study has found that drought monitoring using non-cloud-corrected data (without CPI) overestimates the intensity, spatial distribution, and magnitude of drought in the study area though there was no major drought. The study recommends that the proposed approaches may further be tested over different altitudinal and climatic conditions across the globe.
Acknowledgment
The authors would like to appreciate and acknowledge NASA MODIS team for freely sharing the time-series satellite data and IWMI for the time to time necessary support. Thanks to all the anonymous reviewers whose critical comments and suggestions have greatly helped in improving the manuscript.
Disclosure statement
No potential conflict of interest was reported by the authors.
Reference
- Atkinson, P. M., C. Jeganathan, J. Dash, and C. Atzberger. 2012. “Inter-Comparison of Four Models for Smoothing Satellite Sensor Time-Series Data to Estimate Vegetation Phenology.” Remote Sensing of Environment 123: 400–417. doi:10.1016/j.rse.2012.04.001.
- Atzberger, C., and P. H. C. Eilers. 2011. “A Time Series for Monitoring Vegetation Activity and Phenology at 10-Daily Time Steps Covering Large Parts of South America.” International Journal of Digital Earth 4 (5): 365–386. doi:10.1080/17538947.2010.505664.
- Bartholomé, E., and A. S. Belward. 2005. “GLC2000: A New Approach to Global Land Cover Mapping from Earth Observation Data.” International Journal of Remote Sensing 26 (9): 1959–1977. doi:10.1080/01431160412331291297.
- Beck, P. S. A., C. Atzberger, K. A. Høgda, B. Johansen, and A. K. Skidmore. 2006. “Improved Monitoring of Vegetation Dynamics at Very High Latitudes: A New Method Using MODIS NDVI.” Remote Sensing of Environment 100 (3): 321–334. doi:10.1016/j.rse.2005.10.021.
- Bradley, B. A., R. W. Jacob, J. F. Hermance, and J. F. Mustard. 2007. “A Curve Fitting Procedure to Derive Inter-Annual Phenologies from Time Series of Noisy Satellite NDVI Data.” Remote Sensing of Environment 106 (2): 137–145. doi:10.1016/j.rse.2006.08.002.
- Brooks, E. B., V. A. Thomas, R. H. Wynne, and J. W. Coulston. 2012. “Fitting the Multitemporal Curve: A Fourier Series Approach to the Missing Data Problem in Remote Sensing Analysis.” IEEE Transactions on Geoscience and Remote Sensing 50 (9): 3340–3353. doi:10.1109/TGRS.2012.2183137.
- Brown, J. F., B. D. Wardlow, T. Tadesse, M. J. Hayes, and B. C. Reed. 2008. “The Vegetation Drought Response Index (Vegdri): A New Integrated Approach for Monitoring Drought Stress in Vegetation.” Giscience & Remote Sensing 45 (1): 16–46. doi:10.2747/1548-1603.45.1.16.
- Chen, C. F., N. T. Son, C. R. Chen, and L. Y. Chang. 2011. “Wavelet Filtering of Time-Series Moderate Resolution Imaging Spectroradiometer Data for Rice Crop Mapping Using Support Vector Machines and Maximum Likelihood Classifier.” Journal of Applied Remote Sensing 5 (1): 053525–053525. doi:10.1117/1.3595272.
- Chen, J., J. Chen, A. Liao, X. Cao, L. Chen, X. Chen, C. He, G. Han, S. Peng, and M. Lu. 2015. “Global Land Cover Mapping at 30m Resolution: A POK-Based Operational Approach.” ISPRS Journal of Photogrammetry and Remote Sensing 103: 7–27. doi:10.1016/j.isprsjprs.2014.09.002.
- Chen, J., P. Jönsson, M. Tamura, Z. Gu, B. Matsushita, and L. Eklundh. 2004. “A Simple Method for Reconstructing A High-Quality NDVI Time-Series Data Set Based on the Savitzky–Golay Filter.” Remote Sensing of Environment 91 (3–4): 332–344. doi:10.1016/j.rse.2004.03.014.
- Cho, A.-R., and M.-S. Suh. 2013. “Detection of Contaminated Pixels Based on the Short-Term Continuity of NDVI and Correction Using Spatio-Temporal Continuity.” Asia-Pacific Journal of Atmospheric Sciences 49 (4): 511–525. doi:10.1007/s13143-013-0045-7.
- Dash, J., C. Jeganathan, and P. M. Atkinson. 2010. “The Use of MERIS Terrestrial Chlorophyll Index to Study Spatio-Temporal Variation in Vegetation Phenology over India.” Remote Sensing of Environment 114 (7): 1388–1402. doi:10.1016/j.rse.2010.01.021.
- De Oliveira, J. C., and J. C. N. Epiphanio. 2012. Noise Reduction in MODIS NDVI Time Series Data Based on Spatial-Temporal Analysis. Paper presented at the 2012 IEEE International Geoscience and Remote Sensing Symposium.
- De Oliveira, J. C., J. C. N. Epiphanio, and C. D. Rennó. 2014. “Window Regression: A Spatial-Temporal Analysis to Estimate Pixels Classified as Low-Quality in MODIS NDVI Time Series.” Remote Sensing 6 (4): 3123–3142. doi:10.3390/rs6043123.
- Eastman, J. R., F. Sangermano, E. A. Machado, J. Rogan, and A. Anyamba. 2013. “Global Trends in Seasonality of Normalized Difference Vegetation Index (NDVI), 1982–2011.” Remote Sensing 5 (10): 4799–4818. doi:10.3390/rs5104799.
- Erasmi, S., M. Bothe, and R. A. Petta. 2006. “Enhanced Filtering of MODIS Time Series Data for the Analysis of Desertification Processes in Northeast Brazil.” In Proceedings of the ISPRS/ITC-Midterm Symposium—Remote Sensing: From Pixels to Processes, Enschede, The Netherlands: 8–11.
- FAO. 2015. http://www.fao.org/giews/countrybrief/country.jsp?code=LKA. Accessed on February 2 2016
- FAO. 2016. http://www.fao.org/giews/earthobservation/asis/index_2.jsp?lang=en. Accessed on February 2 2016
- Ghaleb, F., M. Mario, and A. N. Sandra. 2015. “Regional Landsat-Based Drought Monitoring from 1982 to 2014.” Climate 3 (3): 563–577. doi:10.3390/cli3030563.
- Grogan, K., and R. Fensholt. 2013. “Exploring Patterns and Effects of Aerosol Quantity Flag Anomalies in MODIS Surface Reflectance Products in the Tropics.” Remote Sensing 5 (7): 3495–3515. doi:10.3390/rs5073495.
- Hamandawana, H., F. Eckardt, and R. Chanda. 2005. “Linking Archival and Remotely Sensed Data for Long-Term Environmental Monitoring.” International Journal of Applied Earth Observation and Geoinformation 7 (4): 284–298. doi:10.1016/j.jag.2005.06.006.
- Heumann, B. W., J. W. Seaquist, L. Eklundh, and P. Jönsson. 2007. “AVHRR Derived Phenological Change in the Sahel and Soudan, Africa, 1982–2005.” Remote Sensing of Environment 108 (4): 385–392. doi:10.1016/j.rse.2006.11.025.
- Hilker, T., A. I. Lyapustin, C. J. Tucker, P. J. Sellers, F. G. Hall, and Y. Wang. 2012. “Remote Sensing of Tropical Ecosystems: Atmospheric Correction and Cloud Masking Matter.” Remote Sensing of Environment 127: 370–384. doi:10.1016/j.rse.2012.08.035.
- Jakubauskas, M. E., D. R. Legates, and J. H. Kastens. 2001. “Harmonic Analysis of Time-Series AVHRR NDVI Data.” Photogrammetric Engineering and Remote Sensing 67 (4): 461–470.
- Jakubauskas, M. E., D. R. Legates, and J. H. Kastens. 2002. “Crop Identification Using Harmonic Analysis of Time-Series AVHRR NDVI Data.” Computers and Electronics in Agriculture 37 (1–3): 127–139. doi:10.1016/S0168-1699(02)00116-3.
- Jeganathan, C., J. Dash, and P. M. Atkinson. 2010. “Mapping the Phenology of Natural Vegetation in India Using a Remote Sensing-Derived Chlorophyll Index.” International Journal of Remote Sensing 31 (22): 5777–5796. doi:10.1080/01431161.2010.512303.
- Jeganathan, C., J. Dash, and P. M. Atkinson. 2014. “Remotely Sensed Trends in the Phenology of Northern High Latitude Terrestrial Vegetation, Controlling for Land Cover Change and Vegetation Type.” Remote Sensing of Environment 143: 154–170. doi:10.1016/j.rse.2013.11.020.
- Jeganathan, C., and N. Nishant. 2014. “Scrutinising MODIS and GIMMS Vegetation Indices for Extracting Growth Rhythm of Natural Vegetation in India.” Journal of the Indian Society of Remote Sensing 42 (2): 397–408. doi:10.1007/s12524-013-0337-5.
- Ji, L., and A. J. Peters. 2003. “Assessing Vegetation Response to Drought in the Northern Great Plains Using Vegetation and Drought Indices.” Remote Sensing of Environment 87 (1): 85–98. doi:10.1016/S0034-4257(03)00174-3.
- Jia, L., H. Shang, G. Hu, and M. Menenti. 2011. “Phenological Response of Vegetation to Upstream River Flow in the Heihe Rive Basin by Time Series Analysis of MODIS Data.” Hydrology and Earth System Sciences 15 (3): 1047–1064. doi:10.5194/hess-15-1047-2011.
- Jonsson, P., and L. Eklundh. 2002. “Seasonality Extraction by Function Fitting to Time-Series of Satellite Sensor Data.” IEEE Transactions on Geoscience and Remote Sensing 40 (8): 1824–1832. doi:10.1109/TGRS.2002.802519.
- Jönsson, P., and L. Eklundh. 2004. “TIMESAT—A Program for Analyzing Time-Series of Satellite Sensor Data.” Computers & Geosciences 30 (8): 833–845. doi:10.1016/j.cageo.2004.05.006.
- Justice, C. O., J. R. G. Townshend, E. F. Vermote, E. Masuoka, R. E. Wolfe, N. Saleous, D. P. Roy, and J. T. Morisette. 2002. “An Overview of MODIS Land Data Processing and Product Status.” Remote Sensing of Environment 83 (1–2): 3–15. doi:10.1016/S0034-4257(02)00084-6.
- Kandasamy, S., F. Baret, A. Verger, P. Neveux, and M. Weiss. 2013. “A Comparison of Methods for Smoothing and Gap Filling Time Series of Remote Sensing Observations–Application to MODIS LAI Products.” Biogeosciences 10 (6): 4055–4071. doi:10.5194/bg-10-4055-2013.
- Kogan, F. N. 1995. “Application of Vegetation Index and Brightness Temperature for Drought Detection.” Advances in Space Research 15 (11): 91–100. doi:10.1016/0273-1177(95)00079-T.
- Kumar, P., and C. Jeganathan. 2016. “Monitoring Horizontal and Vertical Cropping Pattern and Dynamics in Bihar over a Decade (2001–2012) Based on Time-Series Satellite Data.” Journal of the Indian Society of Remote Sensing. doi:10.1007/s12524-016-0614-1.
- Letu H., T. M. Nagao, T. Y. Nakajima, and Y. Matsumae. 2014. “Method for Validating Cloud Mask Obtained from Satellite Measurements Using Ground-Based Sky Camera.” Applied Optics 53 (31): 7523–7533. doi:10.1364/AO.53.007523.
- Lovell, J. L., and R. D. Graetz. 2001. “Filtering Pathfinder AVHRR Land NDVI Data for Australia.” International Journal of Remote Sensing 22 (13): 2649–2654. doi:10.1080/01431160116874.
- Lu, X., R. Liu, J. Liu, and S. Liang. 2007. “Removal of Noise by Wavelet Method to Generate High Quality Temporal Data of Terrestrial MODIS Products.” Photogrammetric Engineering & Remote Sensing 73 (10): 1129–1139. doi:10.14358/PERS.73.10.1129.
- Luo, X., X. Chen, L. Xu, R. Myneni, and Z. Zhu. 2013. “Assessing Performance of NDVI and NDVI3g in Monitoring Leaf Unfolding Dates of the Deciduous Broadleaf Forest in Northern China.” Remote Sensing 5 (2): 845–861. doi:10.3390/rs5020845.
- Ma, M., and F. Veroustraete. 2006. “Reconstructing Pathfinder AVHRR Land NDVI Time-Series Data for the Northwest of China.” Advances in Space Research 37 (4): 835–840. doi:10.1016/j.asr.2005.08.037.
- McCloy, K. R., and W. Lucht. 2004. “Comparative Evaluation of Seasonal Patterns in Long Time Series of Satellite Image Data and Simulations of a Global Vegetation Model.” IEEE Transactions on Geoscience and Remote Sensing 42 (1): 140–153. doi:10.1109/TGRS.2003.817811.
- Michishita, R., Z. Jin, J. Chen, and B. Xu. 2014. “Empirical Comparison of Noise Reduction Techniques for NDVI Time-Series Based on a New Measure.” ISPRS Journal of Photogrammetry and Remote Sensing 91: 17–28. doi:10.1016/j.isprsjprs.2014.01.003.
- Musial, J. P., M. M. Verstraete, and N. Gobron. 2011. “Technical Note: Comparing the Effectiveness of Recent Algorithms to Fill and Smooth Incomplete and Noisy Time Series.” Atmospheric Chemistry and Physics Discussions 11 (15): 7905–7923. doi:10.5194/acp-11-7905-2011.
- Poggio, L., A. Gimona, and I. Brown. 2012. “Spatio-Temporal MODIS EVI Gap Filling under Cloud Cover: An Example in Scotland.” ISPRS Journal of Photogrammetry and Remote Sensing 72: 56–72. doi:10.1016/j.isprsjprs.2012.06.003.
- Reed, B. C. 2006. “Trend Analysis of Time-Series Phenology of North America Derived from Satellite Data.” Giscience & Remote Sensing 43 (1): 24–38. doi:10.2747/1548-1603.43.1.24.
- Roerink, G. J., M. Menenti, and W. Verhoef. 2000. “Reconstructing Cloudfree NDVI Composites Using Fourier Analysis of Time Series.” International Journal of Remote Sensing 21 (9): 1911–1917. doi:10.1080/014311600209814.
- Roy, D. P., J. S. Borak, S. Devadiga, R. E. Wolfe, M. Zheng, and J. Descloitres. 2002. “The MODIS Land Product Quality Assessment Approach.” Remote Sensing of Environment 83 (1–2): 62–76. doi:10.1016/S0034-4257(02)00087-1.
- Sakamoto, T., B. D. Wardlow, A. A. Gitelson, S. B. Verma, A. E. Suyker, and T. J. Arkebauer. 2010. “A Two-Step Filtering Approach for Detecting Maize and Soybean Phenology with Time-Series MODIS Data.” Remote Sensing of Environment 114 (10): 2146–2159. doi:10.1016/j.rse.2010.04.019.
- Savitzky, A., and M. J. E. Golay. 1964. “Smoothing and Differentiation of Data by Simplified Least Squares Procedures.” Analytical Chemistry 36 (8): 1627–1639. doi:10.1021/ac60214a047.
- Swets, D. L., B. C. Reed, J. D. Rowland, and S. E. Marko. 1999. “A Weighted Least-Squares Approach to Temporal NDVI Smoothing”. Paper presented at the Proceedings of the 1999 ASPRS Annual Conference: From Image to Information, Portland, Oregon.
- Tadesse, T., B. D. Wardlow, M. J. Hayes, M. D. Svoboda, and J. F. Brown. 2010. “The Vegetation Outlook (Vegout): A New Method for Predicting Vegetation Seasonal Greenness.” Giscience & Remote Sensing 47 (1): 25–52. doi:10.2747/1548-1603.47.1.25.
- Tian, F., R. Fensholt, J. Verbesselt, K. Grogan, S. Horion, and Y. Wang. 2015. “Evaluating Temporal Consistency of Long-Term Global NDVI Datasets for Trend Analysis.” Remote Sensing of Environment 163: 326–340. doi:10.1016/j.rse.2015.03.031.
- Velleman, P. F. 1980. “Definition and Comparison of Robust Nonlinear Data Smoothing Algorithms.” Journal of the American Statistical Association 75 (371): 609–615. doi:10.2307/2287657.
- Vermote, E. F., S. Y. Kotchenova, and J. P. Ray. 2015. “MODIS Surface Reflectance User’s Guide.” MODIS Land Surface Reflectance Science Computing Facility, Version 1.4: 1-35.
- Viovy, N., O. Arino, and A. S. Belward. 1992. “The Best Index Slope Extraction (BISE): A Method for Reducing Noise in NDVI Time-Series.” International Journal of Remote Sensing 13 (8): 1585–1590. doi:10.1080/01431169208904212.
- Wang, Q., and J. D. Tenhunen. 2004. “Vegetation Mapping with Multitemporal NDVI in North Eastern China Transect (NECT).” International Journal of Applied Earth Observation and Geoinformation 6 (1): 17–31. doi:10.1016/j.jag.2004.07.002.
- Weiss, D. J., P. M. Atkinson, S. Bhatt, B. Mappin, S. I. Hay, and P. W. Gething. 2014. “An Effective Approach for Gap-Filling Continental Scale Remotely Sensed Time-Series.” ISPRS Journal of Photogrammetry and Remote Sensing 98: 106–118. doi:10.1016/j.isprsjprs.2014.10.001.
- Willmott, C. J., and K. Matsuura. 2005. “Advantages of the Mean Absolute Error (MAE) over the Root Mean Square Error (RMSE) in Assessing Average Model Performance.” Climate Research 30 (1): 79–82. doi:10.3354/cr030079.
- Yagci, A. L., L. Di, and M. Deng. 2015. “The Effect of Corn–Soybean Rotation on the NDVI-Based Drought Indicators: A Case Study in Iowa, USA, Using Vegetation Condition Index.” Giscience & Remote Sensing 52 (3): 290–314. doi:10.1080/15481603.2015.1038427.
- Zambrano, F., M. Lillo-Saavedra., K. Verbist, and O. Lagos. 2016. “Sixteen Years of Agricultural Drought Assessment of the Biobío Region in Chile Using a 250m Resolution Vegetation Condition Index (VCI).” Remote Sensing 8 (6): 530. doi:10.3390/rs8060530.
- Zhang, X., M. A. Friedl, C. B. Schaaf, A. H. Strahler, J. C. F. Hodges, F. Gao, B. C. Reed, and A. Huete. 2003. “Monitoring Vegetation Phenology Using MODIS.” Remote Sensing of Environment 84 (3): 471–475. doi:10.1016/S0034-4257(02)00135-9.
- Zhou, J., L. Jia, G. Hu, and M. Menenti. 2012. Evaluation of Harmonic Analysis of Time Series (HANTS): Impact of Gaps on Time Series Reconstruction. Paper presented at the 2012 Second International Workshop on Earth Observation and Remote Sensing Applications: 8-11. doi: 10.1109/EORSA.2012.6261129.