ABSTRACT
In this paper, we discuss interactive collision detection for large-scale point-clouds. The state-of-the-art laser scanners enable us to capture dense point-clouds from engineering plants. Dense point-clouds are useful for simulating renovation tasks of engineering plants. However, it is difficult to interactively calculate collisions between 3D models and huge point-clouds. We propose an efficient collision detection method for large-scale point-clouds, and discuss an interactive system for collision detection. In our method, collisions are evaluated on two-resolution depth-maps. Our method allows us to precisely and efficiently detect collisions with large-scale point-clouds. The experimental results showed that our system could interactively detect collisions in large-scale point-clouds.
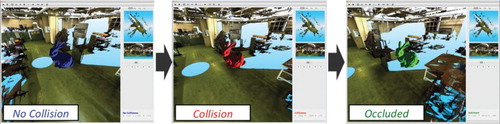
GRAPHICAL ABSTRACT