
ABSTRACT
An exoskeleton is a body-worn mechanical device designed to work in concert with the user to enhance human capabilities. For the dismounted close combatant, an exoskeleton could be worn whilst performing a variety of complex tasks and duties. As such, there is a requirement for the human and the exoskeleton to readily adapt to different movements in different contexts. There have been many attempts to design an exoskeleton to improve the performance of the complex adaptive human system with limited success. Despite a vast investment in time and resources, exoskeletons have not yet been adopted for operational use by military leadership for use by the dismounted close combatant as they are yet to demonstrate substantive augmentation to individual warfighter and collective team capability. We argue that a major limitation of current exoskeleton systems is their inability to concurrently adapt to the user, task and environment. Unless a device can meet this requirement, it is unlikely to offer a comparative benefit to the dismounted close combatant. This paper will present the state of the art of current exoskeleton technology, and recommend future research necessary to reach an acceptable standard of augmentation and thereby lead to widespread adoption.
1. Introduction
The dismounted close combatant is required to complete a broad range of physical tasks. For example, load carriage and manual material handling were found to be the most common physically demanding activities performed by Australian soldiers (Lo, Carstairs, Mudie, Begg, & Billing, Citation2020). During close combatant operations (tactical situations) adopting and holding firing positions were identified as critical tasks (Boynton, Mudie, & Tweedell, Citation2020). Additionally, a causality drag, leopard crawl and wall or window clearance are other physical tasks frequently performed by warfighters (Karakolis, Sinclair, Kelly, Terhaar, & Bossi, Citation2017). These tasks, along with others, can be generally grouped into five capability areas that include mobility, lethality, survivability, sustainability and C4I (Command, Control, Communications, Computers and Intelligence).
In describing the battlefield of 2050, Kott, Alberts, and Wang (Citation2015) forecasted that it will be
populated by fewer human combatants, and these humans would be physically and cognitively augmented with enhanced capabilities to sense their environment, make sense of their environment, and interact and collaborate with one another, as well as with robots of various forms.
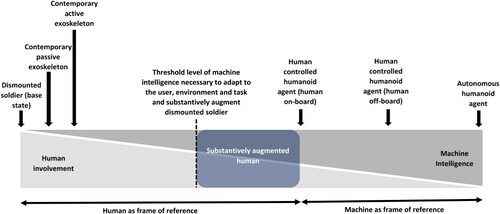
Figure 1. Author’s interpretation of balance between human involvement and machine intelligence to realise a substantively augmented human. The theoretical optimal level of machine intelligence and human involvement is shaded blue. Insufficient machine intelligence, as observed in contemporary exoskeletons, does not enable a sufficient level of adaptation between user, task and environment.
An exoskeleton is defined here as a body-worn mechanical device designed to work in concert with the user to enhance the capabilities of the warfighter (Herr, Citation2009; Mudie et al., Citation2018), with the potential to enable the completion of tasks not possible by the human alone. However, despite a vast investment in time and resources, exoskeletons have not been adopted for operational use as they have not yet been demonstrated to substantively augment task performance to a level that would enhance the individual warfighter and collective team. We posit that this is due to the requirements placed on the exoskeleton developers to focus on optimising specific physiological or biomechanical parameters, i.e. reducing oxygen consumption during load carriage or reducing ground reaction forces (Crowell, Park, Haynes, Neugebauer, & Boynton, Citation2019) as opposed to focusing on more comprehensive individual or collective team performance variables. Simply put, many exoskeletons are designed for specific tasks (e.g. augmenting walking under specific load conditions). When these exoskeletons are required to perform activities outside their original design criteria (i.e. runing, crawling, jumping or lifting for an exoskeleton designed to assist with walking), they are substantially less effective and incur a performance decrement (Gregorczyk et al., Citation2010). In fact, many current exoskeletons potentially degrade performance or inhibit successful performance of other tasks.
While exoskeletons may be designed to optimise a single parameter (such as reducing metabolic cost), it is believed that human movement is based on the complex interaction and concurrent balance between multiple performance characteristics (Todorov, Citation2004; Todorov & Jordan, Citation2002). The aim of this paper is to highlight limitations in current exoskeleton research, and recommend future research that will be necessary to reach an acceptable standard of augmentation and thereby lead to widespread adoption.
2. Current technology
2.1. Utility in the military context
Military applications for exoskeleton have been envisioned over the previous quarter of a century (Crowell et al., Citation2019; Ding et al., Citation2016; Galle, Malcolm, Derave, & De Clercq, Citation2014; Gregorczyk et al., Citation2010; Kazerooni & Steger, Citation2006; Mooney, Rouse, & Herr, Citation2014a; Panizzolo et al., Citation2016; Rome, Flynn, & Yoo, Citation2006; Walsh, Endo, & Herr, Citation2007) and have demonstrated more promising results in recent years (Sawicki, Beck, Kang, & Young, Citation2020). For example, portable exoskeletons have shown a reduction in energy cost of 8–15% during loaded walking (Lee et al., Citation2018; MacLean & Ferris, Citation2019) and 4% during running (Witte, Fiers, Sheets-Singer, & Collins, Citation2020). From an operational perspective, a 10% reduction in energy cost during walking could extend the warfighters’ maximal acceptable working duration during a pack march from 5.5 to 7 h, or allow an extra 10 kg of armour/equipment to be safely carried (Drain, Billing, Neesham-Smith, & Aisbett, Citation2016). However, these incremental improvements in mobility do not offer a clear operational advantage, especially when limitations are introduced, such as reduced tactical mobility. For example, an exoskeleton that reduces energy cost during load carriage may enhance endurance and reduce fatigue levels. However, the same exoskeleton may also reduce the warfighters’ lethality, mobility and thereby survivability, if ambushed by an enemy force.
2.2. Limitations of current technologies
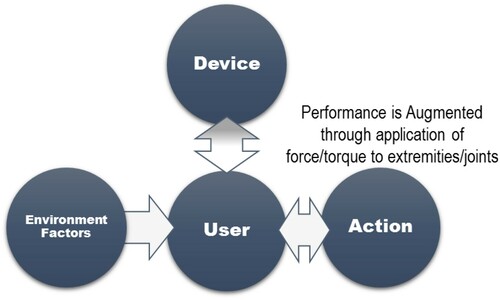
Current exoskeleton design can be characterised by a sequential one-dimensional design framework (). As the framework depicts, the exoskeleton (device) can influence the user, and the user in turn influences or completes an action. In this sequential model, each element is considered in isolation and only the effect of an element, i.e. the device, on another (the user) is studied. Further, the device only receives information on the user and does not receive information about the environment or action. Successful result is considered as the sum of the elements (i.e. device + user) that produces an optimised or enhanced specific action.
Figure 2. Theoretical one dimensional framework for current exoskeletons that are constrained due to the device only receiving information on the user and not receiving information about the environment or action. Shown here is that the device influences the user, and the user completes the action. More advanced algorithms for controlling exoskeletons include some feedback from the user to the device.
Exoskeletons may not have matured to the point that they are fielded partly due to the fact that many are designed to augment specific actions rather than being designed to improve capability areas. For instance, the design of an exoskeleton to optimally enhance ambulation for prolonged load carriage may be completely different to the design of an exoskeleton to enhance tactical mobility (which inherently could include walking, running, crawling, etc.). While humans easily transition between these tasks (i.e. from standing to walking to running, to adopting prone firing positions), exoskeletons have not been as adaptable. Specifically, current technologies are unable to adapt in real-time or pre-emptively to changes in the specific kinematics of the human user due to changes in the task, environment, or user physical state (e.g. fatigued). Noting each human user will adapt in a unique manner necessitates that an exoskeleton must have a level of machine intelligence to account for many complex and dynamic interactions. This sequential approach does not take into account the concurrent and dynamic interaction between the device, task and environment.
Exoskeleton control strategies remain a major limitation to their adaptability. Many control algorithms are based on the kinetics (Mooney, Rouse, & Herr, Citation2014b), kinematics (Ding et al., Citation2016) or EMG (Ferris, Czerniecki, & Hannaford, Citation2005; Sawicki & Ferris, Citation2009) signals during movement. However, these control strategies have shown limited success in allowing an exoskeleton to follow the human’s movement as it adapts to changes in environmental or task constraints. These strategies make the assumption that we can measure kinematics, kinetics or EMG to a sufficient resolution, analyse it in real time, and use that data to affect the motion of the exoskeleton while the exoskeleton is already moving.
More recently, a control algorithm demonstrated the ability to optimise metabolic rate (task output) during walking by providing gradual changes in the timing and magnitude of mechanical assistance, following a period of user optimisation (Zhang et al., Citation2017). In addition, an exoskeleton control algorithm was able to reliably detect the walk-to-run transition and adjust the mechanical assistance accordingly (Kim et al., Citation2019). These approaches may better allow an exoskeleton to provide more individualised mechanical assistance, or adapt to subtle changes in task or environmental constraints. However, exoskeleton control may continue to be limited by only utilising historical or current sensor data of cyclic, expected actions to inform future movements.
Following real-time human movement implies that the exoskeleton will, at best, be slightly delayed in response to unexpected events or disruptions to a cyclic pattern of movement. In fact, the notion of a control strategy that follows the human may be fundamentally flawed. There exists a need for a control system capable of accurately predicting the human’s movement in every environment and under every condition. It is the authors’ view that this level of adaptability is absolutely necessary and recent advances in technology will help realise this aim (https://www.arl.army.mil/business/collaborative-alliances/current-cras/strong-cra/, 2020).
3. Pathway to fielding
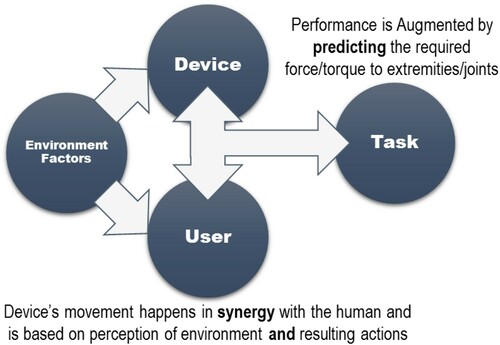
Human movement scientists have long thought that human movement is influenced by the complex interaction between environmental, user, and task constraints (Newell, Citation1986). It may be helpful to view the exoskeleton as adding a fourth constraint to this framework. Therefore, successful adoption of an exoskeleton depends on being able to concurrently balance the interactions between user, exoskeleton, task, and environment. A new framework for fielding and widespread adoption of exoskeletons is proposed () in recognition of the importance of the dynamic interactions between these elements for optimal coordination and control of any activity (Newell, Citation1986).
Figure 3. Proposed multi-dimensional interaction based framework to successfully field exoskeletons in a military context. Successful adoption of an exoskeleton depends on the concurrent integration of multiple elements including user, exoskeleton, task, and environment. In this framework, the exoskeleton receives information on the task, the user and the environment, and more importantly predicts future requirements. We envision future control algorithms will need to incorporate a way for the device to perceive the environment as well as the user’s response to environmental stimuli.
Emerging research considerations from the new framework include the augmented human (user-device interaction); task optimisation (user-task interaction); detection and integration of environmental information; and opportunistic learning (task-device interaction). We propose that a comprehensive and collective understanding of these interactions will provide the greatest potential for successful adoption of military exoskeletons.
3.1. Augmented human
Most current exoskeletons have sensors that allow recording of kinematics and kinetics, but a revolutionary advance in exoskeleton control algorithms will require sensing and understanding not only the human, but the task and environment as well. This information could be used to predict the way the user adapts to the environment to allow the exoskeleton to move in a way that assists movement (as opposed to reacts to the way the human moves). Amongst other systems, users integrate information from their sense of proprioception, visual and vestibular systems during movement, allowing an understanding of current and future state and how they need to move to continue to interact effectively with the environment to complete the task at hand. Exoskeletons do not currently have this ability.
When first wearing an exoskeleton during walking users typically demonstrate a short term neuromotor adaption to reduce their energy expenditure (Galle, Malcolm, Derave, & De Clercq, Citation2013; Gordon & Ferris, Citation2007). These changes represent a learning period by the user adapting to wearing the device. Thus, the user considers the device as a constraint in optimising (augmenting) their movement (). In clinical populations, the interaction between the device and the user has shown long term adaptations in their movement patterns while wearing the exoskeleton, learning over time to move more efficiently with the exoskeleton (Moucheboeuf et al., Citation2020). Research is currently ongoing to determine the extent to which long term movement adaptations occur in a military population wearing an exoskeleton. However, the exoskeleton must also be adaptive, and to a certain extent be able to “learn” along with the user. Therefore, there remains a need to better understand how the user and device collectively learn to optimally augment movement.
3.2. Task optimisation
A thorough understanding of the underlying mechanisms by which humans optimise movement and coordinate motion is needed. Currently, performance optimisation of exoskeletons is defined as an intrinsic (biological and biomechanical) problem. However, optimisation of the task should also be considered. Indeed, biological systems tend to optimise energy expenditure at all times, while accounting for task and environmental constraints (Selinger, O’Connor, Wong, & Donelan, Citation2015). In contrast, optimisation of performance requires a shift in the way the task and environmental constraints are accounted for. There are two aspects to be considered for an exoskeleton to be effective: minimisation of the intrinsic effort and optimisation of the extrinsic task. There is currently a lack of understanding of intrinsic effort and how this variable may be measured across a range of tasks. There is also a lack of knowledge on what is required to be optimised for a given task.
Assistive devices on the market appear to be focused on augmenting a specific intrinsic characteristic, almost disregarding overall task optimisation. This is justified by a methodological limitation, steady state testing and cyclic or repetitive movements such as ambulation. Therefore, in order to advance this field and render the new generation of exoskeletons usable, researchers should study intrinsic and extrinsic elements of performance optimisation both in isolation and combination while using various movement patterns, transitions between movement patterns, and perturbations or unexpected events, including obstacle avoidance.
3.3. Detection and integration of environmental information
A successful exoskeleton would work in concert with the warfighters’ movement, predicting the way the user performs a task in a given environment. There is no direct technology that can estimate (record) human intention. Indeed, intention is an abstract concept that depends in part on tangible (and therefore measurable) elements such as the environment, user state, and task demand. The integration of multi sensor data should produce a “machine-defined” intention. A potential approach is to apply motor control concepts (Kelso, Del Colle, & Schöner, Citation1990) to “train” the machine for human intention prediction. Human intention as “development of a thought” is not accessible, but with extensive monitoring of human performance during already required military training (opportunistic learning) control algorithms could be refined to better assist the user (Lance et al., Citation2020). Due to the volume of accessible data in military-based tasks, learning and prediction should take place online where sensor data is immediately processed and utilised to maximise machine intelligence.
So far, human intention has been defined using internal frames of reference such as muscle electrical activity, brain activity, motion of segments in space. Some methods are indeed useful because the signal is recorded before the visible movement, allowing the pre-emptive actuation of the exoskeleton. However, all methods lack an understanding of the context (environment and task constraints) within which the intention is derived. From a dynamical system perspective (Kelso et al., Citation1990), intentional movement emerges from (or is defined by) the interaction between the user’s biomechanical and physiological constraints, environmental constraints and task constraints. The key for an assistive device is the ability to recognise the context and anticipate (predict) which family of possible solutions (redundancy problem) should be facilitated (assistance provided) to accomplish the task at hand. To achieve this, it is necessary for the exoskeleton to predict how the task will be carried out. To recognise a user’s ability, an extensive library of warfighter tasks will be required so that the device is constantly updated with new information about the unique way of completing movements within the current environmental constraints.
Shifting the thought paradigm used to design an exoskeleton and its control algorithms also necessitates a different approach to sensing the environment. As shown in , the human user, the task, and the device are all influenced by the environment. Understanding how to design a better exoskeleton control system likely requires the device to perceive and understand the environment on the same level that the human does. Perceiving environmental constraints requires advanced sensors. However, solely perceiving these constraints is insufficient. A successful exoskeleton controller needs to react to these constraints in the way the human user does. For instance, vision allows humans to perceive our environment and aids in determining the limb configurations needed to continue moving. For example, perceiving an obstacle will help someone who is walking change their gait to avoid an obstacle. In this way, vision helps the human adapt to their environment and fine-tune their gait to account for objects in the environment in anticipation of interacting with those objects. Initially, the human was merely walking. Once the obstacle was perceived, the task changes to “continue walking while adapting to the obstacle”. This change is subtle, but highly important. Current exoskeletons that are based on kinematics, kinetics or EMG are limited to knowing the current state of the user. In contrast, algorithms are needed that can predict the near future state of the user. Framed this way, the problem of designing an exoskeleton control algorithm seems much more complex than human control in that humans are only constrained by the environment, task and internal constraints. In contrast, the exoskeleton control needs to adapt to the environment, task, the device’s internal constraints (such as its limb lengths, degrees of freedom, ability to generate power, etc.), and the user.
Consider a system that incorporates a portable eye tracker to constantly record and analyse what the user is looking at while walking or running with an exoskeleton. Although an eye tracking device introduces new challenges (Singh & Singh, Citation2012), this data could start to provide information on the user’s perception and could form part of the control system. Eye tracking provides a way of quantifying what the user is looking at in the environment. If the eye tracking data is augmented with inertial measurement unit (IMU) data, there may be the opportunity to develop models of how that individual performs specific tasks and reacts to specific obstacles in the environment. Given the correct circumstances, IMU augmented eye tracking while performing military tasks and/or moving in a natural environment offers that chance of sensing how humans interact with the task and environment at an unprecedented level. However, traditional discrete approaches for processing large volumes of data can be tedious and time consuming. Applying advanced machine learning algorithms and predictive filters provides a feasible approach for processing and drawing insight from continuous data streams and the opportunity to build a user specific response model to important stimuli in the environment. These methods can be used to develop advanced and individualised control strategies for exoskeletons.
It seems like there is a natural progression occurring toward a more instrumented warfighter. The most promising technology that needs to be developed in order to realise more accurate control algorithms for exoskeletons appears to be in utilising advanced machine learning for processing data from many of the sensors warfighters are already beginning to use. The final challenge is sensor fusion via machine learning to predict the future movement of the human, and move the exoskeleton in the same way.
3.4. Opportunistic learning
In order for an exoskeleton to understand and predict how a specific human responds to environmental and task constraints, there needs to be a movement library of how that user reacts to the environment and task. Each user is unique and they will perform a task in a specific way that is the result of the interaction of their physical, cognitive, task and environmental constraints. Given this intra- and inter-subject variability while performing any given task, an exoskeleton must keep adapting to the user. To achieve this, the control system of the exoskeleton must constantly update itself based on the flow of new information. In this context, opportunistic learning refers to an online system acquiring information while users perform tasks in the field, and streaming information to a central computational unit that sends updated information to the exoskeleton. Thus, future research should aim to take advantage of the warfighters’ everyday duties by recording relevant information and utilising machine learning to extract as many features as necessary to update the control system of the exoskeleton (Lance et al., Citation2020). As users learn to perform a task in their optimal way, the device should learn and acquire this information in order to provide an increasing level of assistance.
A system like this would require large amounts of data collected over long periods of time. Consider the above example of IMUs and eye tracking data that a dismounted combatant wears on patrol as part of their regular work equipment. The system may store the data for a day or more, and then send it to a central processing system that develops the necessary machine intelligence unique for that individual. The longer the warfighter wears the system, the more data is collected and the more intelligent the exoskeleton becomes at predicting how that user will interact with objects in the environment.
As simple as this idea may sound, it represents an important change in the way control algorithms are conceived. In this setup, we propose that the feature acquisition algorithm should process a continuous stream of input data that is forever growing, with no distinct training or test samples. Similar to how humans learn, exoskeletons should improve through an accumulation of knowledge and experience.
4. Conclusions
A state-of-the-art exoskeleton would provide transformational benefits to the warfighter, whereby the best of the human and machine are taken collectively to enhance the warfighter and collective team capabilities. To achieve this vision, an exoskeleton needs to be based on a deep understanding of the underlying mechanisms by which humans optimise movement, have the ability to sense the environment, and have an understanding of how the user reacts to specific task and environmental constraints. In addition, the next generation of exoskeleton should be able to derive the likelihood of an intended movement based on understanding an individual user and how they interact with their internal and external constraints. Therefore, we propose the following thematic recommendations:
A shift from a one-dimensional to multi-dimensional framework where interdependency among constraints are explicitly studied rather than implicitly assumed
A deeper understanding of intrinsic and extrinsic elements of task optimisation during various movement patterns, transitions between movement patterns, and perturbations or unexpected events.
The prediction of near future state will likely be reliant on large datasets gathered for individual users over long periods of time, which can be achieved by opportunistic and persistent sensing of the environment and the individual’s reactions to environmental stimuli.
Opportunistic sensing of the environment will likely result in extremely large datasets, requiring machine learning to be developed to understand that data and construct predictive models of the environment and individual’s response.
Disclosure statement
No potential conflict of interest was reported by the author(s).
Additional information
Funding
References
- Boynton, A. C., Mudie, K. L., & Tweedell, A. (2020). Physical augmentation opportunities within close combat operations. Paper presented at the International Congress on Soldiers’ Physical Performance, Qubec.
- Crowell, H. P., Park, J.-H., Haynes, C. A., Neugebauer, J. M., & Boynton, A. C. (2019). Design, evaluation, and research challenges relevant to exoskeletons and exosuits: A 26-year perspective from the U.S. Army Research Laboratory. IISE Transactions on Occupational Ergonomics and Human Factors, 7(3-4), 199–212. doi:10.1080/24725838.2018.1563571
- DeCostanza, A.H., Marathe, A.R., Bohannon, A., Evans, A.W., Palazzolo, E.T., Metcalfe, J.S., McDowell, K., 2018. Enhancing human-agent teaming with individualized, adaptive technologies: A discussion of critical scientific questions. US Army Research Laboratory Aberdeen Proving Ground United States. ARL-TR-8359
- Ding, Y., Panizzolo, F. A., Siviy, C., Malcolm, P., Galiana, I., Holt, K. G., & Walsh, C. J. (2016). Effect of timing of hip extension assistance during loaded walking with a soft exosuit. Journal of NeuroEngineering and Rehabilitation, 13(1), 1–10. doi:10.1186/s12984-016-0196-8
- Drain, J., Billing, D., Neesham-Smith, D., & Aisbett, B. (2016). Predicting physiological capacity of human load carriage – a review. Applied Ergonomics, 52, 85–94. doi:10.1016/j.apergo.2015.07.003
- Ferris, D. P., Czerniecki, J. M., & Hannaford, B. (2005). An ankle-foot orthosis powered by artificial pneumatic muscles. 21(2), 189. doi:10.1123/jab.21.2.189
- Galle, S., Malcolm, P., Derave, W., & De Clercq, D. (2013). Adaptation to walking with an exoskeleton that assists ankle extension. Gait and Posture, 38(3), 495–499. doi:10.1016/j.gaitpost.2013.01.029
- Galle, S., Malcolm, P., Derave, W., & De Clercq, D. (2014). Enhancing performance during inclined loaded walking with a powered ankle–foot exoskeleton. European Journal of Applied Physiology, 114(11), 2341–2351. doi:10.1007/s00421-014-2955-1
- Gordon, K. E., & Ferris, D. P. (2007). Learning to walk with a robotic ankle exoskeleton. Journal of Biomechanics, 40(12), 2636–2644. doi:10.1016/j.jbiomech.2006.12.006
- Gregorczyk, K. N., Hasselquist, L., Schiffman, J. M., Bensel, C. K., Obusek, J. P., & Gutekunst, D. J. (2010). Effects of a lower-body exoskeleton device on metabolic cost and gait biomechanics during load carriage. Ergonomics, 53(10), 1263–1275. doi:10.1080/00140139.2010.512982
- Herr, H. (2009). Exoskeletons and orthoses: Classification, design challenges and future directions. Journal of NeuroEngineering and Rehabilitation, 6(1), doi:10.1186/1743-0003-6-21
- Karakolis, T., Sinclair, B. A., Kelly, A., Terhaar, P., & Bossi, L. L. M. (2017). Determination of orientation and practice requirements when using an obstacle course for mobility performance assessment. Human Factors: The Journal of the Human Factors and Ergonomics Society, 59(4), 535–545. doi:10.1177/0018720816686611
- Kazerooni, H., & Steger, R. (2006). The Berkeley lower extremity exoskeleton. Journal of Dynamic Systems, Measurement and Control, Transactions of the ASME, 128(1), 14–25. doi:10.1115/1.2168164
- Kelso, J. A. S., Del Colle, J. D., & Schöner, G. (1990). Action-perception as a pattern formation process. In M. Jeannerod (Ed.), Attention and performance 13: Motor representation and control (p. 139–169). Lawrence Erlbaum Associates, Inc.
- Kim, J., Lee, G., Heimgartner, R., Arumukhom Revi, D., Karavas, N., Nathanson, D., … Walsh, C. J. (2019). Reducing the metabolic rate of walking and running with a versatile, portable exosuit. Science, 365(6454), 668–672. doi:10.1126/science.aav7536
- Kott, A., Alberts, D. S., & Wang, C. (2015). War of 2050: A battle for information, communications, and computer security. arXiv preprint arXiv:1512.00360.
- Lance, B., Larkin, G., Touryan, J., Rexwinkle, J., Gutstein, S., Gordon, S., … Lawhern, V. (2020). Minimizing data requirements for soldier-interactive AI/ML applications through opportunistic sensing (Vol. 11413). SPIE.
- Lee, S., Kim, J., Baker, L., Long, A., Karavas, N., Menard, N., … Walsh, C. J. (2018). Autonomous multi-joint soft exosuit with augmentation-power-based control parameter tuning reduces energy cost of loaded walking. Journal of NeuroEngineering and Rehabilitation, 15(1), 66. doi:10.1186/s12984-018-0410-y
- Lo, M., Carstairs, G. L., Mudie, K. L., Begg, R., & Billing, D. C. (2020). The use of wearable assistive technology to increase soldiers’ effectiveness. Human Factors and Mechanical Engineering for Defense and Safety, 4(1), 7. doi:10.1007/s41314-020-00035-0
- MacLean, M. K., & Ferris, D. P. (2019). Energetics of walking with a robotic knee exoskeleton. Journal of Applied Biomechanics, 35(5), 320–326. doi:10.1123/jab.2018-0384
- Mooney, L. M., Rouse, E. J., & Herr, H. M. (2014a). Autonomous exoskeleton reduces metabolic cost of human walking. Journal of NeuroEngineering and Rehabilitation, 11, 1. doi:10.1186/1743-0003-11-151
- Mooney, L. M., Rouse, E. J., & Herr, H. M. (2014b). Autonomous exoskeleton reduces metabolic cost of human walking during load carriage. Journal of NeuroEngineering and Rehabilitation, 11, 1. doi:10.1186/1743-0003-11-80
- Moucheboeuf, G., Griffier, R., Gasq, D., Glize, B., Bouyer, L., Dehail, P., & Cassoudesalle, H. (2020). Effects of robotic gait training after stroke: A meta-analysis. Annals of Physical and Rehabilitation Medicine, doi:10.1016/j.rehab.2020.02.008
- Mudie, K. L., Boynton, A. C., Karakolis, T., O'Donovan, M. P., Kanagaki, G. B., Crowell, H. P., … Billing, D. C. (2018). Consensus paper on testing and evaluation of military exoskeletons for the dismounted combatant. Journal of Science and Medicine in Sport, 21(11), 1154–1161. doi:10.1016/j.jsams.2018.05.016
- Newell, K. (1986). Constraints on the development of coordination. Motor development in children: Aspects of coordination and control.
- Panizzolo, F. A., Galiana, I., Asbeck, A. T., Siviy, C., Schmidt, K., Holt, K. G., & Walsh, C. J. (2016). A biologically-inspired multi-joint soft exosuit that can reduce the energy cost of loaded walking. Journal of NeuroEngineering and Rehabilitation, 13, 1. doi:10.1186/s12984-016-0150-9
- Rome, L. C., Flynn, L., & Yoo, T. D. (2006). Rubber bands reduce the cost of carrying loads. Nature, 444(7122), 1023–1024. doi:10.1038/4441023a
- Sawicki, G. S., Beck, O. N., Kang, I., & Young, A. J. (2020). The exoskeleton expansion: Improving walking and running economy. Journal of NeuroEngineering and Rehabilitation, 17(1), 25. doi:10.1186/s12984-020-00663-9
- Sawicki, G. S., & Ferris, D. P. (2009). A pneumatically powered knee-ankle-foot orthosis (KAFO) with myoelectric activation and inhibition. Journal of NeuroEngineering and Rehabilitation, 6(1), 23. doi:10.1186/1743-0003-6-23
- Selinger, J. C., O’Connor, S. M., Wong, J. D., & Donelan, J. M. (2015). Humans can continuously optimize energetic cost during walking. Current Biology, 25(18), 2452–2456. doi:10.1016/j.cub.2015.08.016
- Singh, H., & Singh, J. (2012). Human eye tracking and related issues: A review. International Journal of Scientific and Research Publications, 2(9), 1–9.
- Todorov, E. (2004). Optimality principles in sensorimotor control. Nature Neuroscience, 7(9), 907–915. doi:10.1038/nn1309
- Todorov, E., & Jordan, M. I. (2002). Optimal feedback control as a theory of motor coordination. Nature Neuroscience, 5(11), 1226–1235. doi:10.1038/nn963
- Walsh, C. J., Endo, K., & Herr, H. (2007). A quasi-passive leg exoskeleton for load-carrying augmentation. International Journal of Humanoid Robotics, 4(3), 487–506. doi:10.1142/S0219843607001126
- Witte, K. A., Fiers, P., Sheets-Singer, A. L., & Collins, S. H. (2020). Improving the energy economy of human running with powered and unpowered ankle exoskeleton assistance. Science Robotics, 5(40), eaay9108. doi:10.1126/scirobotics.aay9108
- Zhang, J., Fiers, P., Witte, K. A., Jackson, R. W., Poggensee, K. L., Atkeson, C. G., & Collins, S. H. (2017). Human-in-the-loop optimization of exoskeleton assistance during walking. Science, 356(6344), 1280–1284. doi:10.1126/science.aal5054