
 ?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.
?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.Abstract
The interaction between plants and herbivores is one of the most fundamental processes in ecology. Discrete-time models are frequently used for describing the dynamics of plants and herbivores interaction with non-overlapping generations, such that a new generation replaces the old at regular time intervals. Keeping in view the interaction of the apple twig borer and the grape vine, the qualitative behaviour of a discrete-time plant–herbivore model is investigated with weak predator functional response. The topological classification of equilibria is investigated. It is proved that the boundary equilibrium undergoes transcritical bifurcation, whereas unique positive steady-state of discrete-time plant–herbivore model undergoes Neimark–Sacker bifurcation. Numerical simulation is provided to strengthen our theoretical discussion.
1. Introduction
In mathematical biology, plant–herbivore models are basically modifications of prey–predator models [Citation8]. The interaction between plants and herbivores has been investigated by many researchers both in differential and difference equations. Kartal [Citation31] investigated the dynamical behaviour of a plant–herbivore model including both differential and difference equations. In [Citation30] Kang et al. discussed bistability, bifurcation and chaos control in a discrete-time plant–herbivore model. In [Citation38] Liu et al. investigated stability, limit cycle, Neimark–Sacker bifurcations and homoclinic bifurcation for a plant–herbivore model with toxin-determined functional response. Li et al. [Citation37] discussed period-doubling and Neimark–Sacker bifurcations for a plant–herbivore model incorporating plant toxicity in the functional response of plant–herbivore interactions. Similarly, for some other discussions related to qualitative behaviour of plant–herbivore models, the interested reader is referred to [Citation2,Citation10,Citation21,Citation25–27,Citation29,Citation33,Citation45,Citation47,Citation52] and references are therein.
Taking into account the interaction of the apple twig borer and the grape vine [Citation3], a mathematical model for plant–herbivore interaction based on weak predator functional response is given by
(1)
(1) where
and
are population densities for grape vine and apple twig borer, respectively. Moreover, α, β and γ are positive parameters. For some earlier investigations related to model (Equation1
(1)
(1) ), we refer to [Citation4–7,Citation34,Citation35]. Moreover, taking into account strong predator functional response, Din [Citation12] discussed global stability of system (Equation1
(1)
(1) ), and Khan et al. [Citation32] investigated Neimark–Sacker bifurcation for system (Equation1
(1)
(1) ) with strong predator functional response.
The main findings of this paper are summarized as follows:
Existence of equilibria and their stability analysis is investigated.
It is proved that model (Equation1
(1)
Direction and existence criteria for Neimark–Sacker bifurcation are investigated at positive steady-state of plant–herbivore model (Equation1
Pole-placement and hybrid control methods are implemented in order to discuss chaos control in system (Equation1
Moreover, in Section 2 the existence of steady-states and their local asymptotic behaviour is analysed. Section 3 is dedicated to investigate transcritical bifurcation about boundary steady-state of system (Equation1(1)
(1) ). In Section 4, we discuss Neimark–Sacker bifurcation at positive steady-state of model (Equation1
(1)
(1) ). We study pole-placement chaos control and hybrid control strategies in Section 5. Finally, in Section 6, numerical simulations are carried out to authenticate the theoretical discussion.
2. Existence of equilibria and stability
In this section, first we investigate fixed points for system (Equation1(1)
(1) ). For this, these fixed points must solve the following algebraic system:
(2)
(2) Simple computation yields the following steady-states for the plant–herbivore model (Equation1
(1)
(1) ):
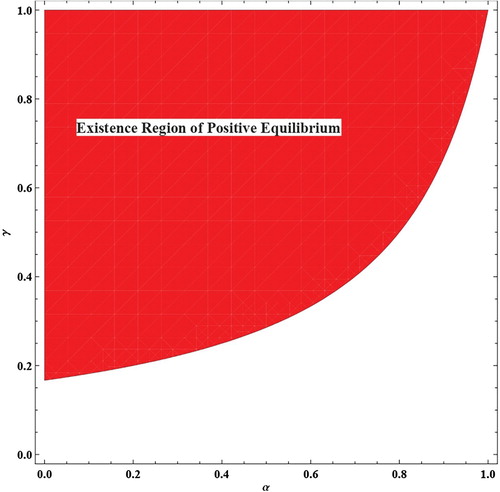
Assume that
, then
is unique positive equilibrium point of the system (Equation1
(1)
(1) ). For
, the region in
-plane where inequalities
are satisfied is depicted in Figure by red shaded region. In order to see the dynamical behaviour of system (Equation1
(1)
(1) ) at equilibria, we first compute Jacobian matrix of system (Equation1
(1)
(1) ) at
as follows:
(3)
(3) Then, at
the Jacobian matrix
given in (Equation3
(3)
(3) ) reduces to
Then topological classification of
is given as follows:
Figure 1. Existence region (red) for at
.
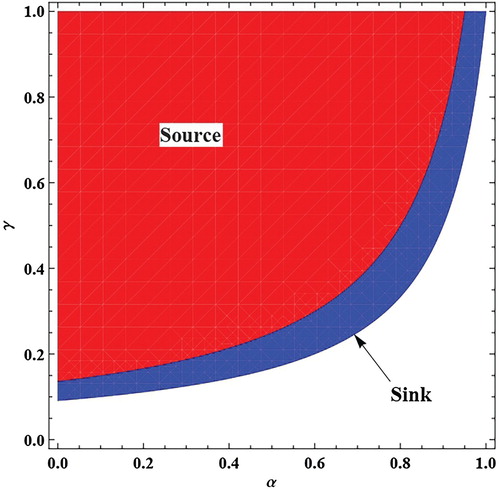
Next, for and
the aforementioned topological classification for
is depicted in Figure . Moreover, for the existence of boundary equilibrium
, we assume that
, then the Jacobian matrix
at
is computed as follows:
Furthermore, topological classification for boundary equilibrium
is itemized as follows:
Figure 2. Topological classification of for
and
.
![Figure 2. Topological classification of P0 for α∈[0,2] and γ∈[0,2].](/cms/asset/1b5965b2-d2e8-4561-b145-cf24a30c22d4/tjbd_a_1638976_f0002_oc.jpg)
Furthermore, for ,
and
the topological classification of
is depicted in Figure . At the end of this section, we explore dynamics of model (Equation1
(1)
(1) ) at its unique positive steady-state
. For this, first Jacobian matrix at this equilibrium is computed as follows:
Moreover, characteristic polynomial for
is computed as follows:
(4)
(4) From (Equation4
(4)
(4) ) we have
and
Assume that
, and
, then from first part of last inequality we have
, or equivalently
. Hence, it follows that
. Similarly, one can prove that
under the existence conditions for positive steady-state
of system (Equation1
(1)
(1) ). That is,
for
, and
. Indeed, it follows that
Therefore, according to Jury condition roots of
inside the unit open disk if and only if
, which on simplification gives that
, or
and
. Similarly,
if and only if
and
. Moreover,
if and only if
and
. Due to aforementioned computations, we have the following results:
Lemma 2.1
Assume that , and
, then the following conditions hold true:
In Figure , topological classification of is depicted for
,
and
.
Figure 3. Topological classification of for
,
and
.
![Figure 3. Topological classification of P1 for α∈[0,1], β∈[0,200] and γ=0.995.](/cms/asset/98b5b6c9-7b9e-464e-9847-f74b8f75fd44/tjbd_a_1638976_f0003_oc.jpg)
Figure 4. Topological classification of for
,
and
.
3. Transcritical bifurcation
In this section, we investigate that boundary equilibrium undergoes transcritical bifurcation. For this, we assume that
Consider the set
given by
Assume that
, then system (Equation1
(1)
(1) ) is equivalently represented by the following 2-dimensional map:
(5)
(5) where
is very small perturbation in
. Furthermore, if we consider
and y=v, then map (Equation5
(5)
(5) ) is transformed into the following map:
(6)
(6) An application of Taylor series expansion about
yields that
(7)
(7) where
and
Since at
the linear part of map (Equation7
(7)
(7) ) is already in canonical form. Therefore, in order to implement the centre manifold theorem [Citation9], let
denotes the centre manifold for the map (Equation7
(7)
(7) ) which is evaluated at
in a small neighbourhood of
. Then,
is computed as follows:
where
Moreover, we define the following mapping which is restricted to the centre manifold
:
where
Furthermore, it follows that
Then, the following theorem gives the parametric conditions for existence and direction of transcritical bifurcation for system (Equation1
(1)
(1) ) at its boundary fixed point
.
Theorem 3.1
Suppose that and
, then system (Equation1
(1)
(1) ) undergoes transcritical bifurcation at its boundary steady-state
when parameter γ varies in a small neighbourhood of
. Furthermore, two steady-states bifurcate from
for
, and merge as the steady-state
at
and disappear at
.
4. Neimark–Sacker bifurcation
In this section, we study that unique positive steady-state of system (Equation1(1)
(1) ) undergoes Neimark–Sacker bifurcation. For this, necessary conditions for existence of Neimark–Sacker bifurcation at
are given as follows:
Next, we consider the following set:
Assume that
, and
be small perturbation in
, then system (Equation1
(1)
(1) ) can be expressed by the following two-dimensional perturbed map:
(8)
(8) In order to translate the unique positive fixed point
of the perturbed map (Equation8
(8)
(8) ) at origin, we consider the following translations:
(9)
(9) Then, from (Equation8
(8)
(8) ) and (Equation9
(9)
(9) ) it follows that
(10)
(10) where
Moreover, the characteristic polynomial for
is computed as follows:
(11)
(11) Assume that
and
be complex conjugate roots of (Equation11
(11)
(11) ), then a simple computation yields that
Furthermore, it follows that
, but
for all i=1,2,3,4 if and only if
(12)
(12) Since
and
, therefore
. Hence, condition (Equation12
(12)
(12) ) is satisfied. Moreover, it follows that
The following similarity transformation is considered in order to convert linear part of (Equation10
(10)
(10) ) into canonical form at
:
(13)
(13) where
and
Then, from transformation (Equation13
(13)
(13) ) it follows that
(14)
(14) Assuming
, then from (Equation10
(10)
(10) ), (Equation13
(13)
(13) ) and (Equation14
(14)
(14) ) we obtain the following normal form of map (Equation10
(10)
(10) ):
(15)
(15) where
and
Taking into account the bifurcation theory of normal forms [Citation28,Citation36,Citation43,Citation48,Citation49], the first Lyapunov exponent at
is computed as follows:
where
and
Due to aforementioned computations, we have the following theorem:
Theorem 4.1
Suppose that ,
,
and
, then unique positive equilibrium point
of system (Equation1
(1)
(1) ) undergoes Neimark–Sacker bifurcation when the bifurcation parameter γ varies in a small neighbourhood of
. Moreover, if L<0, then an attracting invariant closed curve bifurcates from the equilibrium point for
, and if L>0, then a repelling invariant closed curve bifurcates from the equilibrium point for
.
5. Chaos control
Chaos control is a method of stabilization with the help of small perturbations which are applied to unstable periodic orbits for a given system. The purpose of chaos control is to make chaotic behaviour more predictable and stable. For this, a small perturbation is applied as compare to the original size of the system under consideration, and in a result the natural dynamics of the system is prevented from any major modification. Recently, chaos control for irregular complex dynamics has developed as one of the leading topics in nonlinear applied science. The pioneer articles related to chaos control were published in 1990 and after that their number has been steadily increasing [Citation46]. Moreover, the practical methods related to chaos control can be implemented in various areas such as communications, physics laboratories, biochemistry, turbulence, and cardiology [Citation40]. Furthermore, in the case of dynamical systems related to biological breeding of species, chaos control is considered to be an important feature for investigation. On the other hand, population models with non-overlapping generations have more irregular complex behaviour. For some recent investigation related to chaos control in discrete-time models we refer to [Citation1,Citation13–20,Citation22–24] and references are therein.
In this section, first we discuss pole-placement chaos control method based on state feedback control which was introduced by Romeiras et al. [Citation44] (also see [Citation41]). This method is also known as generalized or modified OGY method proposed by Ott et al. [Citation42]. For the application of pole-placement technique to model (Equation1(1)
(1) ), one can rewrite this system as follows:
(16)
(16) where γ denotes parameter for chaos control. Furthermore, it is assumed that γ lies in a small interval of type
, where
and
represents the nominal parameter lies in the chaotic region. One can apply pole-placement method in order to move unstable trajectory towards desired stable orbit. For this, suppose that
be an unstable fixed point for model (Equation1
(1)
(1) ) lies in a chaotic region under the influence of transcritical or Neimark–Sacker bifurcations. Keeping in view the method of linearization, one can approximate system (Equation16
(16)
(16) ) in the neighbourhood of the unstable fixed point
as follows:
(17)
(17) where
In order to check that system (Equation16
(16)
(16) ) is controllable, the following matrix is computed:
(18)
(18) Assume that
is positive fixed point, then it follows that
. Therefore, rank of C is 2 at positive equilibrium point. Next, we assume that
, where
, then system (Equation17
(17)
(17) ) can be written as
(19)
(19) Moreover, equilibrium point
is a sink if and only if both eigenvalues
and
for the matrix A−BK lie in an open unit disk. Moreover,
and
are called regulator poles. Placing these eigenvalues at appropriate position is called pole-placement method. Furthermore, pole-placement problem has unique solution because rank of matrix C is two. Denote
as characteristic equation for matrix A and
is characteristic equation of A−BK, then unique solution of the pole-placement problem is given as follows:
(20)
(20) where T=CM and
. Then it follows that
(21)
(21) where all partial derivatives in (Equation21
(21)
(21) ) are evaluated at
. From (Equation20
(20)
(20) ) and (Equation21
(21)
(21) ), we have the following unique solution of pole-placement problem:
Secondly, we apply another comparatively simple chaos control method known as hybrid control strategy based on parameter perturbation and state feedback control [Citation39,Citation50]. An application of hybrid control strategy to model (Equation1
(1)
(1) ) yields the following controlled system:
(22)
(22) where
is control parameter. Assume that
be an equilibrium point of system (Equation22
(22)
(22) ), then Jacobian matrix for system (Equation22
(22)
(22) ) computed at
is given as follows:
(23)
(23) It is easy to observe that system (Equation22
(22)
(22) ) is controllable as long as the steady-state
of system (Equation22
(22)
(22) ) is locally asymptotically stable. Keeping in view this fact, one has the following result for controllability of system (Equation22
(22)
(22) ).
Lemma 5.1
The equilibrium point of system (Equation22
(22)
(22) ) is locally asymptotically stable if the following holds true:
6. Numerical simulation and discussion
First, we choose ,
,
and
. Then, system (Equation1
(1)
(1) ) undergoes transcritical bifurcation at its boundary equilibrium point
as bifurcation parameter γ passes through
. Furthermore, at
the positive steady-state
exists and undergoes Neimark–Sacker bifurcation. At
the characteristic equation for Jacobian matrix of model (Equation1
(1)
(1) ) is computed as follows:
Obviously,
and
be roots for aforementioned characteristic equation with
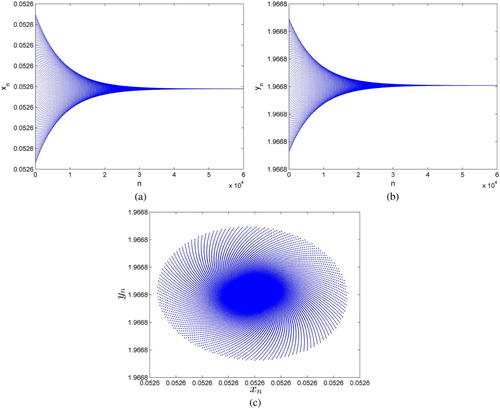
. The maximum Lyapunov exponents (MLE) and bifurcation diagrams are depicted in Figure . Secondly, we select
,
,
and
, then model (Equation1
(1)
(1) ) undergoes Neimark–Sacker bifurcation at its positive steady-state
as bifurcation parameter γ varies in a small neighbourhood of
. For the parametric values
the characteristic equation of the Jacobian matrix of system (Equation1
(1)
(1) ) is computed as follows:
Moreover, we have
and
as roots for aforementioned characteristic equation with
. MLE and bifurcation diagrams are depicted in Figure . On the other hand, some phase portraits for
are depicted in Figure .
Finally, we take ,
and
to verify the effectiveness of chaos control strategies introduced in Section 5. Under this selection of parameters, system (Equation1
(1)
(1) ) has unique positive steady-state given by
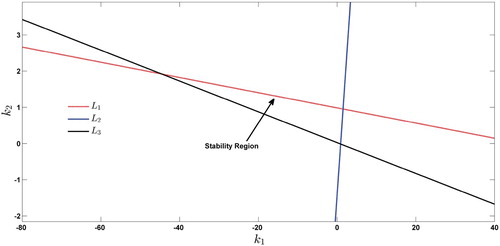
. An application of pole-placement method gives the following controlled system:
(24)
(24) Then, variational matrix for system (Equation24
(24)
(24) ) is computed as follows:
Furthermore, the lines for marginal stability are computed as follows:
and
The triangular stability region bounded by these marginal stability lines is depicted in Figure .
Figure 5. Bifurcation diagrams and MLE for system (Equation1(1)
(1) ) with
,
,
and
: (a) bifurcation diagram for
, (b) bifurcation diagram for
and (c) MLE.
![Figure 5. Bifurcation diagrams and MLE for system (Equation1(1) xn+1=xnα(1+yn2)+βxn,yn+1=γyn(1+xn),(1) ) with α=0.99, β=0.008, γ∈[0.2,0.7] and (x0,y0)=(1.25,0.001): (a) bifurcation diagram for xn, (b) bifurcation diagram for yn and (c) MLE.](/cms/asset/82e28a26-63d3-4307-99ad-29dcb487b7e3/tjbd_a_1638976_f0005_oc.jpg)
Figure 6. Bifurcation diagrams and MLE for system (Equation1(1)
(1) ) with
,
,
and
: (a) bifurcation diagram for
, (b) bifurcation diagram for
and (c) MLE.
![Figure 6. Bifurcation diagrams and MLE for system (Equation1(1) xn+1=xnα(1+yn2)+βxn,yn+1=γyn(1+xn),(1) ) with α=0.2, β=0.5, γ∈[0.45,0.95] and (x0,y0)=(0.78,1.426): (a) bifurcation diagram for xn, (b) bifurcation diagram for yn and (c) MLE.](/cms/asset/d9e22d06-97ca-4dc8-ace6-aa122274b477/tjbd_a_1638976_f0006_oc.jpg)
Figure 7. Phase portraits of system (Equation1(1)
(1) ) for
,
,
and with different values of γ: (a) phase portrait for
, (b) phase portrait for
, (c) phase portrait for
and (d) phase portrait for
.
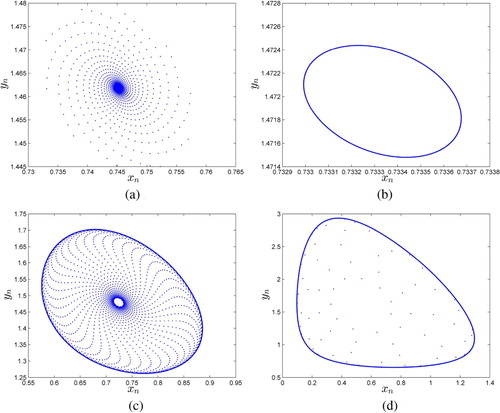
Figure 8. Bounded stability region for system (Equation24(24)
(24) ).
Next, for same parametric values we apply hybrid control method to system (Equation1(1)
(1) ). In this case system (Equation22
(22)
(22) ) is written as follows:
(25)
(25) Then, Jacobian matrix of system (Equation25
(25)
(25) ) and its characteristic equation are computed as follows:
and
Keeping in view Jury condition and aforementioned characteristic equation,
if and only if
. At
the plots for system (Equation25
(25)
(25) ) are depicted in Figure .
Figure 9. Plots for system (Equation25(25)
(25) ) with
and
: (a) plot for
, (b) plot for
and (c) phase portrait.
7. Concluding remarks
Local asymptotic stability, bifurcation analysis and chaos control are investigated for the apple twig borer and the grape vine type plant–herbivore model. The discrete-time model is obtained by taking into account the weak predator functional response. Furthermore, existence of equilibria and their stability analysis is investigated. Taking into account the bifurcating behaviour for biological populations, it must be noted that these phenomena are essential for competition between plants and herbivores [Citation11]. It is proved that plant–herbivore model undergoes transcritical bifurcation at its boundary equilibrium by implementing bifurcation theory of normal forms and centre manifold theorem. Direction and existence criteria for Neimark–Sacker bifurcation are investigated at positive steady-state of plant–herbivore model. Bifurcating behaviour and chaos have always been considered as disadvantageous phenomena in biology. On the other hand, due to chaotic behaviour population can undergo a higher risk of extinction due to the unpredictability. Therefore, these are catastrophic for the breeding of biological population [Citation51]. In order to prevent biological populations from this ruinous situation, one might think about applications of chaos and bifurcation control. Pole-placement and hybrid control methods are implemented in order to discuss chaos control in the system. Furthermore, our investigation reveals that the pole-placement method is more effective as compared to the hybrid control method.
8. Future work
It must be noted that the weak predator functional response in system (1) is similar to Holling type-III function Equation1(1)
(1) . Therefore, it is more interesting to apply Holling type-II functional response. With such implementation of Holling type-II functional response, plant–herbivore model (Equation1
(1)
(1) ) can be rewritten as follows:
(26)
(26) Stability, bifurcation analysis and chaos control for model (Equation26
(26)
(26) ) is our future work for investigation.
Acknowledgements
The authors are grateful to the referees for their excellent suggestions which greatly improve the presentation of the paper.
Disclosure statement
No potential conflict of interest was reported by the authors.
ORCID
Qamar Din http://orcid.org/0000-0002-0999-7404
References
- M.A. Abbasi and Q. Din, Under the influence of crowding effects: Stability, bifurcation and chaos control for a discrete-time predator–prey model, Int. J. Biomath. 12(4) (2019), p. 1950044.
- K.C. Abbott and G. Dwyer, Food limitation and insect outbreaks: Complex dynamics in plant–herbivore models, J. Anim. Ecol. 76 (2007), pp. 1004–1014.
- L.J.S. Allen, M.K. Hannigan, and M.J. Strauss, Mathematical analysis of a model for a plant–herbivore system, Bull. Math. Biol. 55(4) (1993), pp. 847–864.
- L.J.S. Allen, M.J. Strauss, H.G. Thorvilson, and W.N. Lipe, A preliminary mathematical model of the apple twig borer (Coleoptera: Bostrichidae) and grapes on the Texas High Plains, Ecol. Model. 58 (1991), pp. 369–382.
- R. Beiriger, The bionomics of Amphicerus bicaudatus (say), the apple twig borer, on the Texas High Plains, M.Sc. thesis, Texas Tech University, Lubbock, TX, 1988.
- R. Beiriger, H. Thorvilson, W. Eipe, and D. Rummel, The life history of the apple twig borer, Proceedings of the Texas Grape Growers Association, Vol. 12, 1988, pp. 101–106.
- R. Beiriger, H. Thorvilson, W. Lipe, and D. Rummel, Determination of adult apple twig borer sex based on a comparison of internal and external morphology, Southwest. Entomol. 14 (1989), pp. 199–203.
- Y.M. Buckley, M. Rees, A.W. Sheppard, and M.J. Smyth, Stable coexistence of an invasive plant and biocontrol agent: A parameterized coupled plant–herbivore model, J. Appl. Ecol. 42 (2005), pp. 70–79.
- J. Carr, Application of Center Manifold Theory, Springer-Verlag, New York, 1981.
- C. Castillo-Chavez, Z. Feng, and W. Huang, Global dynamics of a plant–herbivore model with toxin-determined functional response, SIAM J. Appl. Math. 72(4) (2012), pp. 1002–1020.
- Q. Cui, Q. Zhang, Z. Qiu, and Z. Hu, Complex dynamics of a discrete-time predator–prey system with Holling IV functional response, Chaos Soliton Fract. 87 (2016), pp. 158–171.
- Q. Din, Global behavior of a plant–herbivore model, Adv. Differ. Equ. 2015 (2015), p. 119.
- Q. Din, Complexity and chaos control in a discrete-time prey–predator model, Commun. Nonlinear Sci. Numer. Simul. 49 (2017), pp. 113–134.
- Q. Din, Neimark–Sacker bifurcation and chaos control in Hassell–Varley model, J. Differ. Equ. Appl. 23(4) (2017), pp. 741–762.
- Q. Din, Bifurcation analysis and chaos control in discrete-time glycolysis models, J. Math. Chem. 56(3) (2018), pp. 904–931.
- Q. Din, Controlling chaos in a discrete-time prey–predator model with Allee effects, Int. J. Dynam. Control 6(2) (2018), pp. 858–872.
- Q. Din, Qualitative analysis and chaos control in a density-dependent host–parasitoid system, Int. J. Dynam. Control 6(2) (2018), pp. 778–798.
- Q. Din, A novel chaos control strategy for discrete-time Brusselator models, J. Math. Chem. 56(10) (2018), pp. 3045–3075.
- Q. Din, Stability, bifurcation analysis and chaos control for a predator–prey system, J. Vib. Control 25(3) (2019), pp. 612–626.
- Q. Din, T. Donchev, and D. Kolev, Stability: Bifurcation analysis and chaos control in chlorine dioxide–iodine–malonic acid reaction, MATCH Commun. Math. Comput. Chem. 79(3) (2018), pp. 577–606.
- Q. Din, A.A. Elsadany, and H. Khalil, Neimark–Sacker bifurcation and chaos control in a fractional-order plant–herbivore model, Discrete Dyn. Nat. Soc. 2017 (2017), pp. 1–15.
- Q. Din, Ö.A. Gümüş, and H. Khalil, Neimark–Sacker bifurcation and chaotic behaviour of a modified host–parasitoid model, Z. Naturforsch. A 72(1) (2017), pp. 25–37.
- Q. Din and M. Hussain, Controlling chaos and Neimark–Sacker bifurcation in a host–parasitoid model, Asian J. Control 21(3) (2019), pp. 1202–1215.
- Q. Din and M.A. Iqbal, Bifurcation analysis and chaos control for a discrete-time enzyme model, Z. Naturforsch. A 74(1) (2019), pp. 1–14.
- M. El-Shahed, A.M. Ahmed, and I.M.E. Abdelstar, Dynamics of a plant–herbivore model with fractional order, Progr. Fract. Differ. Appl. 3(1) (2017), pp. 59–67.
- Z. Feng and D.L. DeAngelis, Mathematical Models of Plant–Herbivore Interactions, CRC Press, Taylor and Francis Group, Boca Raton, 2018.
- Z. Feng, Z. Qiu, R. Liu, and D.L. DeAngelis, Dynamics of a plant–herbivore–predator system with plant-toxicity, Math. Biosci. 229(2) (2011), pp. 190–204.
- J. Guckenheimer and P. Holmes, Nonlinear Oscillations, Dynamical Systems, and Bifurcations of Vector Fields, Springer-Verlag, New York, 1983.
- S.S. Jothi and M. Gunasekaran, Chaos and bifurcation analysis of plant–herbivore system with intra-specific competitions, Int. J. Adv. Res. 3(8) (2015), pp. 1359–1363.
- Y. Kang, D. Armbruster, and Y. Kuang, Dynamics of a plant–herbivore model, J. Biol. Dyn. 2(2) (2008), pp. 89–101.
- S. Kartal, Dynamics of a plant–herbivore model with differential–difference equations, Cogent Math. 3(1) (2016), p. 1136198.
- A.Q. Khan, J. Ma, and D. Xiao, Bifurcations of a two-dimensional discrete time plant–herbivore system, Commun. Nonlinear Sci. Numer. Simul. 39 (2016), pp. 185–198.
- Y. Kuang, J. Huisman, and J.J. Elser, Stoichiometric plant–herbivore models and their interpretation, Math. Biosci. Eng. 1(2) (2004), pp. 215–222.
- M.R.S. Kulenović and G. Ladas, Dynamics of Second Order Rational Difference Equations: With Open Problems and Conjectures, Chapman and Hall/CRC, New York, 2002.
- M.R.S. Kulenović and O. Merino, Discrete Dynamical Systems and Difference Equations with Mathematica, Chapman and Hall/CRC, New York, 2002.
- Y.A. Kuznetsov, Elements of Applied Bifurcation Theory, Springer-Verlag, New York, 1997.
- Y. Li, Z. Feng, R. Swihart, J. Bryant, and H. Huntley, Modeling plant toxicity on plant–herbivore dynamics, J. Dynam. Differ. Equ. 18(4) (2006), pp. 1021–1024.
- R. Liu, Z. Feng, H. Zhu, and D.L. DeAngelis, Bifurcation analysis of a plant–herbivore model with toxin-determined functional response, J. Differ. Equ. 245 (2008), pp. 442–467.
- X.S. Luo, G.R. Chen, B.H. Wang, and J.Q. Fang, Hybrid control of period-doubling bifurcation and chaos in discrete nonlinear dynamical systems, Chaos Soliton Fract. 18(4) (2003), pp. 775–783.
- S. Lynch, Dynamical Systems with Applications Using Mathematica, Birkhäuser, Boston, 2007.
- K. Ogata, Modern Control Engineering, 2nd ed., Prentice-Hall, Englewood, NJ, 1997.
- E. Ott, C. Grebogi, and J.A. Yorke, Controlling chaos, Phys. Rev. Lett. 64(11) (1990), pp. 1196–1199.
- C. Robinson, Dynamical Systems: Stability, Symbolic Dynamics and Chaos, Boca Raton, New York, 1999.
- F.J. Romeiras, C. Grebogi, E. Ott, and W.P. Dayawansa, Controlling chaotic dynamical systems, Physica D 58 (1992), pp. 165–192.
- T. Saha and M. Bandyopadhyay, Dynamical analysis of a plant–herbivore model bifurcation and global stability, J. Appl. Math. Comput. 19(1–2) (2005), pp. 327–344.
- E. Schöll and H.G. Schuster, Handbook of Chaos Control, Wiley-VCH, Weinheim, 2007.
- G. Sui, M. Fan, I. Loladze, and Y. Kuang, The dynamics of a stoichiometric plant–herbivore model and its discrete analog, Math. Biosci. Eng. 4(1) (2007), pp. 29–46.
- Y.H. Wan, Computation of the stability condition for the Hopf bifurcation of diffeomorphism on R2, SIAM J. Appl. Math. 34 (1978), pp. 167–175.
- S. Wiggins, Introduction to Applied Nonlinear Dynamical Systems and Chaos, Springer-Verlag, New York, 2003.
- L-G. Yuan and Q-G. Yang, Bifurcation, invariant curve and hybrid control in a discrete-time predator–prey system, Appl. Math. Model. 39(8) (2015), pp. 2345–2362.
- X. Zhang, Q.L. Zhang, and V. Sreeram, Bifurcation analysis and control of a discrete harvested prey–predator system with Beddington–DeAngelis functional response, J. Franklin Inst. 347 (2010), pp. 1076–1096.
- Y. Zhao, Z. Feng, Y. Zheng, and X. Cen, Existence of limit cycles and homoclinic bifurcation in a plant–herbivore model with toxin-determined functional response, J. Differ. Equ. 258(8) (2015), pp. 2847–2872.