?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.
?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.ABSTRACT
Crowd motion simulation requires specification of a range of parameters, each reflecting certain aspects of agent behavior. But what parameters matter the most? Are they all equally important? The question is important given that available data and resources for parameter calibration are limited, and priorities often need to be made. Here, for the first time, a full-spectrum sensitivity analysis of crowd model parameters is reported. It is shown that estimates of simulated evacuation time are, by far, most dependent on the value of locomotion/operational parameters, especially those that determine discharge rate at bottlenecks. The next most critical set of parameters are those that influence change of direction choices. If a crowd simulation model fails to reproduce bottleneck flows accurately, efforts to refine other modeling layers will be in vain. Similarly, if the model fails to represent exit choice adaptation/changing accurately, efforts to refine the exit choice model will be fruitless.
1. Introduction
Similar to models of vehicular traffic, simulation models of crowd evacuations include a range of input parameters (Zeng et al. Citation2014). For microsimulation models, each of these parameters represent a certain aspect of behavior for simulated agents (Ibrahim, Venkat, and De Wilde Citation2019; Kretz, Lehmann, and Hofsäß Citation2014; Mohd Ibrahim, Venkat, and Wilde Citation2017; Wolinski et al. Citation2014). Unlike the case of vehicular traffic, however, the movement of pedestrians is less regulated and less constrained, and this adds more degrees of freedom to the movement, thereby creating more complexity in the simulation process. In a crowd evacuation scenario, pedestrians can choose their own speed of movement within the physical boundaries of the space and their movement is not constrained to a pre-defined physical network. They can overtake others (Zhang et al. Citation2018, Citation2019) and reverse/adjust their decisions (Gwynne et al. Citation2000; Haghani and Sarvi Citation2019c) and movement trajectories (Corbetta, Muntean, and Vafayi Citation2015). Their actions and their perceived ‘best strategy’ are often influenced by observing decisions of others (Kinateder, Comunale, and Warren Citation2018; Kinateder et al. Citation2014, Citation2014) which, in addition to the heightened state of emotion caused by urgency (Haghani and Sarvi Citation2019a; Moussaïd et al. Citation2016; Muir, Bottomley, and Marrison Citation1996; Shipman and Majumdar Citation2018), makes the behavioral response complicated. These all add to the complexity of simulating pedestrian traffic, especially in cases of emergency evacuation, in contrast to the simulation of vehicular traffic.
Previous studies have repeatedly shown how predictions of these models depend heavily on the value of their input parameters (Chraibi et al. Citation2013, Citation2011; Chraibi, Seyfried, and Schadschneider Citation2010; Crociani et al. Citation2018; Haghani, Sarvi, and Rajabifard Citation2018; Hollander and Liu Citation2008; Köster and Gödel Citation2015; Xu, Chraibi, and Seyfried Citation2021; Zhou, Nakanishi, and Asakura Citation2021b). Great efforts have been made in the past in the scientific literature to develop mathematically sophisticated models of simulation that can potentially represent a large variety of behavioral phenomena (Teknomo Citation2006). But not as much attention has been paid to the problem of fine-tuning (calibrating) parameters of such models (Dias et al. Citation2018; Dias and Lovreglio Citation2018; Ko, Kim, and Sohn Citation2013; Kretz, Lohmiller, and Sukennik Citation2018; Li et al. Citation2015; Werberich, Pretto, and Cybis Citation2015b). Due to the lack of benchmark empirical data, in many cases, these calibration parameters have been set arbitrarily and based on best suggestions of modelers (Helbing, Farkas, and Vicsek Citation2000). The problem of ‘model validation’ is also another important overlooked issue (Berrou et al. Citation2007; Gwynne et al. Citation2005; Lovreglio, Ronchi, and Borri Citation2014), though beyond the scope of the current study.
Within a given structure of simulation modeling, one would be able to produce vastly different patterns of movement and vastly different predictions of evacuation time depending on how the parameters of the model are set. Due to the variety of the existing simulation models, no formal or universal guideline has, thus far, been established for the calibration of simulation models (Hollander and Liu Citation2008). Often, the procedure for parameter calibration is known and given but the required data may not exist in adequate quality and quantity. As a result of that, ‘in practice, simulation model – based analyses have often been conducted under default parameter values or best guessed values’ (Park and Schneeberger Citation2003). It has been suggested that ‘this is mainly due to either difficulties in field data collection or lack of a readily available procedure for simulation model calibration and validation’ (Park and Schneeberger Citation2003).
The general behavior of an evacuee in real-life is comprised of multiple aspects of decision-making (Gwynne and Hunt Citation2018), and the procedure for simulating the behavior of simulated evacuees in agent-based microscopic models should also reflect this (Asano, Iryo, and Kuwahara Citation2010; Zeng et al. Citation2017). As a result, a comprehensive representation of evacuees’ behavior in a simulated modeling framework requires a large number of parameters. These parameters each bear physical/mechanical or behavioral interpretations and are all crucial for determining how accurately the model predicts (Li et al. Citation2015; Lovreglio, Ronchi, and Nilsson Citation2015; Wang et al. Citation2020, Citation2019; Werberich, Pretto, and Cybis Citation2015a). However, there is no reason to believe that they all share the same level of importance in terms of their degree of influence on the overall accuracy of the model. It is not inconceivable that some parameters may play a more critical role than others in terms of determining how accurately the model predicts. Hence, a critical question that one might ask in this regard would concern the identification of parameters whose calibration are of priority. The answer to this question is of great significance and has major implications for modeling practices, in that, it gives the modeler guides as to which kinds of parameters require more attention (e.g. more rigorous calibration procedure, more or better-quality data and more validation testing). Fine-tuning calibration parameters has always been challenging for a variety of reasons (Kretz, Lohmiller, and Sukennik Citation2018) including unavailability of the required data, but knowing which parameters need prioritization can be of great value to inform the modeler where more attention and resources need to be deployed (e.g. in terms of provision of field data (Haghani Citation2020b; Robin et al. Citation2009) or experimental data (Daamen and Hoogendoorn Citation2012a; Haghani Citation2020a, Citation2021)).
This study aims to address the abovementioned question. In this work, we employ a comprehensive tool of simulation modeling that we have developed, composed of all major layers of behavior (or modules of modeling) relevant to crowd evacuation. Most layers of this simulation tool are econometric (choice or duration) models and nearly all layers are fully parameterized. Most critical parameters of the model have been directly calibrated based on disaggregate experimental data.Footnote1 In this work, we first provide a brief overview of the calibration procedure of this model and will subsequently focus on the main question that drives this study: which set of parameters are most critical in determining simulation outputs? To explore this question, we design an extensive set of numerical simulation experiments on these parameters around their calibrated values in a way that makes the relative comparisons across different parameters possible. In consideration of the fact that outcomes of such kind of analyses may be case-specific and dependant on the particular features of the simulated setup, we examine a large variety of complex crowd evacuation setups. The numerical simulation experiments are designed to unravel what happens if sensitivity to these parameters is contrasted on a comparable scale in geometrically complex scenarios. We examine scenarios that show resemblance to real-world spaces and those that are complex enough to require all available layers of the model to remain active and essential for the simulation. Such analyses will give us an indication of the kind of parameters that have the highest priority to be calibrated in cases of evacuation simulation in complex spaces. Also, by association, such findings will provide a range of behavioral insights as secondary outcomes. They will, for example, provide indications about important questions such as the followings. In order for the process of a crowd evacuation to be accelerated, what aspects of evacuee behavior can be modified, and in what direction. What aspects of behavior should be made a priority to be influenced or modified? Which aspect of their behavior will have the largest impact on accelerating the discharge process, if modified? This has great implications for response agencies and evacuation managers to optimize evacuation processes and increase the chance of survival in crises through behavioral intervention (Haghani Citation2020c).
2. Simulation model structure
2.1. Overall structure
The simulation model that we employ for the numerical analyses reported in this work is comprised of six major modeling layers. These include reaction time module, room-sequence-choice module, exit-choice module, exit-choice changing module, local pathfinding and step-taking module. Consistent with a number of earlier studies, we adopt the three-level categorization of ‘strategic,’ ‘tactical’ and ‘operational’ in order to refer to the various layers of this model (Haghani and Sarvi Citation2016b, Citation2018a; Haghani, Sarvi, and Shahhoseini Citation2015). Any layer of the model that generates a decision prior to the actual movement of the simulated agents is labeled a ‘strategic’ layer (this includes the reaction time and room-sequence choice). The exit-choice model and the model that allows those choices to be revisited and possibly updated are labeled ‘tactical’ layers of the model. The local pathfinding and step-taking models are ‘operational’ layers of the model and are the modeling layers that mechanically navigate and move each agent toward their chosen target in accordance with all their major decisions have been previously simulated by the two other layers. provides a summary of this modeling structure and their associated parameters. respectively detail the definition of the parameters and the variables included in these modeling layers.
Figure 1. The overall structure of the computational simulation modelling tool employed in this work. Illustrating various behavioural layers of the model, the nature (or type) of the model at each layer and the parameters involved in each layer.
Table 1. The list of the parameters of the simulation model, their descriptions, and the calibrated (or suggested) values. The asterisk indicates the parameters whose values have been calibrated empirically and are the subject of the sensitivity analyses in this work.
Table 2. The list of the variables and their description in the simulation model.
The strategic, tactical, and operational decisions are generated in sequence and individually for each simulated agent. Each layer of the model provides part of the necessary input for the layers that comes immediately after. The strategic and tactical modules are all econometric (duration or choice) type of models. The local pathfinding module is algorithmic, and the step-taking module is simply a social-force model. Only a subset of the parameters has been directly calibrated based on empirical observations (those that were assumed to be most critical and those for which experimental data could be collected). The asterisk sign in specifies these calibrated parameters. For the rest of the parameters, reasonable default values have been suggested based on trial and error during the process of development and implementation. Only parameters that have been directly calibrated are the subjects of sensitivity analyses in this work.
2.2. Reaction time (or premovement time)
The reaction times of the simulated agents are generated using a Cox-proportional Weibull Hazard Duration model. For each simulated agent i, the minimum distance to exits in the initial room where the agent is located, at the onset of the evacuation, is measured (Min_Exit_DISTi). This is simply calculated by measuring the Euclidian distance between the spatial coordinates of the agent and those of the center point of each exit in the current room. The amount of time difference between the onset of the simulated evacuation and the moment the agent initiates a movement, known as the agent’s reaction time Ti, is determined by the following equation.
where
2.3. Room-sequence choice
The room-sequence choice is a multinomial logit model. At the onset of evacuation (before any agent initiates its movement), the set of room sequences that can lead an agent from the current room of agent i to a final exit (i.e. hypothetical safety) is enumerated. We label this set by Ri. For each agent i and for each of these room sequences like r, the minimum distance between the coordinates of agent i and a final exit is calculated and labeled as Room_Seq_DISTir. To calculate these variables, each room sequence in Ri is considered, and within that room sequence, all possible exit sequences are enumerated. The one that generates the smallest distance is outputted as Room_Seq_DISTir. It should be noted that this is only a rough measurement in order to generate a reasonable room sequence for the agent. Through the exit-choice changing module, the agent will later during the movement process be able to modify this sequence in a dynamic way. The probability of agent i choosing room sequence r is given by the following equation. The chosen room sequence is simulated for each agent according to the sets of room-sequence probabilities for that agent.
2.4. Exit choice
Once the choice of room sequence is simulated for an agent i, the information is fed to the exit-choice module as an input. This module first generates the set of all exits in the current room (where the agent is located), those that are feasible according to the previous choice of room sequence. These exits constitute the set of feasible exits for agent i, Ei. At the simulated moment when the choice of exit is generated for agent i, the attributes of all exits are calculated for agent i. This includes DISTie (distance to exit e), CONGie (congestion or queue size at exit e), FLOWie (flow size toward exit e) and VISie (dummy 0–1 variable that equals 1 if exit e is visible to agent i). Then, interaction of the FLOW and VIS is calculated through simple transformations to generate FLTOVIS and FLTOINVIS attributes: FLTOVISie=FLOWie ×VISie and FLTOINVISie=FLOWie ×(1-VISie). Having calculated the attributes of all exits in the choice set of agent i, the probability of choosing exit e is calculated using the following equations. The chosen exit is simulated for each agent according to the sets of exit probabilities for that agent. Note that the exit choice model only applies to the set of exits in the room where the agent is situated at every time step of the simulation, exclusive to those that lead to the room sequence set in the previous modeling step.
Where:
2.5. Exit-choice changing
The initial exit choice generated for each agent i, is allowed to be revisited at a certain time frequency. Agent i is given the possibility to revisit its initial choice of exit and it is given a binary choice between two alternatives: ‘change’ or ‘not-change.’ In order to simulate the probabilities for these two alternatives, a number of variables (associated with agent i) are calculated at the moment of decision revisit. This includes Min_CONGi (the smallest size of queue (smallest congestion) among the all the exits in the current room where i is located), CONGie* (the queue size at the currently chosen exit for agent i, where e* indicates the chosen exit), Visi (a dummy 0–1 variable that equals 1, if there is a visible exit with smaller queue size than that of the currently chosen exit for i), SocInfi (the number of agents (other than i) that have changed their choice of exit from the one currently chosen by i to another exit within the last t = 2 seconds of the simulated time). The probability of agent i changing its initial exit choice is calculated using the following equations. The choice of whether to change or not to change is simulated according to these probabilities. If the simulated decision is to change the initial choice, then a new choice set is generated for agent i, and that choice set is fed back to the exit-choice module to generate a new choice of exit for i. This new choice set excludes the one exit that is chosen currently and also the ones through which the agent has entered the current room. It includes every other exit in the current room that can lead to any final exit. This implicitly allows the initial choice of room-sequence to also be revisited at that instance.
Where:
2.6. Local pathfinding
Once the choice of exit (an initial choice or an updated one) is simulated, the information is passed on to the subsequent layer of the model, the local pathfinding. This module is algorithmic and not based on a model like the previous layers and is borrowed from a popular algorithm in computer science and particularly computer gaming. The A*-pathfinding algorithm, as an extension of the Dijkstra’s shortest path algorithm, has been adopted for this module (Cui and Shi Citation2011). The algorithm basically generates the shortest weighted path between the current coordinates of the simulated agent (the origin node) and the mid-point coordinates of the chosen exit in the current room (the destination node). The shortest weighted path is generated based on a weighted grid graph overlaid on the movement space. The weighted grid graph allows the simulated agent to circumvent congested areas by penalizing the links proportional to the number of other agents in their vicinity. The closest node to each agent in the room is identified and all links leading to that node are penalized by a factor of ω. These penalties are cumulative. The presence of the obstacles penalizes the nodes in the same way except that in this case, the magnitude of the penalty is infinite so that the agent completely avoids the obstacles. The A* shortest path for each agent is updated at a certain frequency. Once the path is generated for an agent, the vector that connects the current coordinates to the coordinates of the next node on the path is calculated and fed to a social-force model (Helbing, Farkas, and Vicsek Citation2000) as the vector of ‘desired direction.’
2.7. Step-taking
For each agent i, each step motion is determined by the net outcome () of the desired force of pedestrian i,
, the social forces from other pedestrians
,
; and the forces from walls (w),
. These forces are formulated through the following equations according to Helbing, Farkas, and Vicsek (Citation2000). Definitions of the parameters and variables in these equations can be found in respectively. The function
is an identity function when its argument is positive, and otherwise, returns the value of 0. Also,
,
,
,
and
are calibration parameters of this model.
3. Overview of the calibration
Each layer of the model outlined in the previous section was calibrated directly through a certain set of experimental observations. This is with the exception of the room-sequence choice module and the local pathfinding module. The empirical observations were collected through series of simulated evacuation experiments that the authors have carried out since 2015 (). With the exception of the bottleneck experiment (), each experiment was designed for analyzing and extracting disaggregate data for certain aspect(s) of decision-making. The data for those experiments were obtained through individual-by-individual image processing and choice data extraction. We label these four experiments, illustrated in respectively as Experiment I, II, III, and IV. Overall details for these experiments have been provided in and full details can be accessed in previous individual publications (Haghani and Sarvi Citation2018b; Haghani, Sarvi, and Shahhoseini Citation2019, Citation2020).
Figure 2. Still images from the data extraction process of a sample of scenarios in Experiment I. Subfigure (a) shows an exit-choice observation extraction example and subfigure (b) shows an example of data extraction for exit choice adaptation. Both figures only illustrate the moment of observation extraction. At such moments, the set of information regarding the subject’s decision is recorded including the choice, choice set and attribute levels of the alternatives.
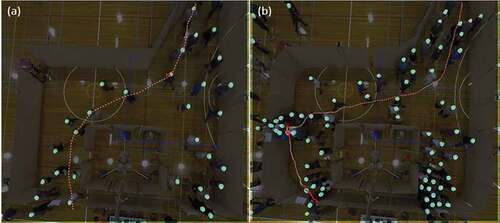
Figure 3. Still images from the data extraction process of a sample of scenarios in Experiment II. Subfigure (a) shows an exit-choice observation extraction example and subfigure (b) shows an example of data extraction for exit choice adaptation. Both figures only illustrate the moment of observation extraction. At such moments, the set of information regarding the subject’s decision is recorded including the choice, choice set and attribute levels of the alternatives.
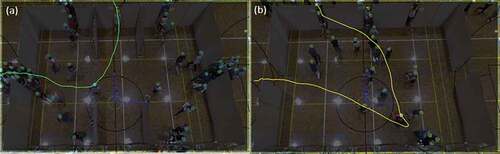
Figure 4. Still images from the data extraction process of a sample of scenarios in Experiment III. Subfigure (a) shows a reaction-time observation extraction example and subfigure (b) shows an example of data extraction for exit choice adaptation.
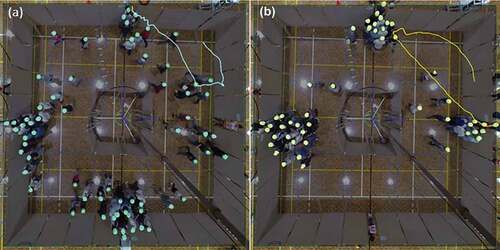
Figure 5. Still image from the setup of the Experiment IV, the bottleneck experiment.

Table 3. The list of experiments whose observations were used for the calibration of the numerical simulation model used in this study.
Experiments I and II were primarily designed to generate exit-choice observations. Experiment III was primarily designed to generate reaction time and exit-choice change observations. However, both Experiments I and II were subsequently re-analyzed for observations of exit-choice change and contributed observations to that dataset. Experiments II and III scenarios were carried out under two distinct contextual conditions: low urgency and high urgency. Here, we only focus on simulation of a high-urgency evacuation and, therefore, our calibration estimates are reported consistent with that. Therefore, the segment of observations that were derived from low-urgency scenarios in each of the experiments II and III were disregarded for this analysis. Similarly, Experiment IV scenarios were conducted under three levels of competitiveness and here we only use the part of the observations that is derived from the highest level of competitiveness. Also, this experiment was only analyzed at the aggregate level and based on the single measure of ‘total evacuation time.’
For the decision-making experiments (experiments I, II and III) each scenario is unique and is a combination of a certain set of control factors (such as the number of exits, the widths of exits, the positions of open exits, the number of participants and the positioning of barricades). Since the experiments were designed (primarily) for individual-level data extraction, they were exempt from requiring repetition of individual scenarios. What is critical for such design is to generate large degrees of variability for the individual-level observations, a design attribute that was achieved through changing the levels of those control factors. This ensures that the data overall contains a large variety of choice observations (in terms of the attribute levels and the size of the choice set) required for efficient model estimation.
In experiments I and II, subjects would wait at certain holding areas (one holding area for Experiment I and two for Experiment II) and enter the evacuation room where they have multiple exit choice options. During the data extraction process, we would single out the trajectory of each participant one by one, analyze their movement and identify the moment where their trajectory, body movement, head orientation, and step size indicate that a firm exit decision has been made. At that moment during the movement of the subject, we would freeze the scene and extract the information relevant to their choice including the choice itself, the choice set, and the attribute levels (or variables) (as specified by EquationEq. 5(5)
(5) ). This set of information constitutes one choice observation. Should the participant display more than one clear choice observation (which happened occasionally during the experiments), then we would extract a secondary observation for that subject as well.
For the subjects that show multiple exit decisions (i.e. those who make a clear initial decision and advance toward it and then subsequently change their decision to another exit), we also extract exit-choice change observations. For these subjects, the moment of the secondary exit choice coincides with the moment of the exit-choice change. We would identify the moment at which the subject abandons the previously chosen exit and make advancement toward another alternative. At this moment, as pointed out earlier, a secondary exit choice observation is extracted. While still freezing the scene at that moment (which we refer to as the moment of the ‘decision change’), we also extract an ‘exit-choice change’ observation. This observation is a binary choice, and for that we record the following set of information: the choice (which is always ‘change’ for the subject at hand), the choice set (which is fixed consisting of the ‘change’ and ‘no change’ alternatives), and the attribute levels (as specified by EquationEq. 7(7)
(7) ). While at that moment, one auxiliary ‘no-change’ observation is also extracted from any other exit in that space (other than the one that the subject has abandoned) so that the choice contains both change and no-change observations. This process was first applied to the observations of Experiment III, but then was subsequently also applied to Experiments I and II that were re-analyzed for this purpose.
For the extraction of the reaction time observations in Experiment III, we also singled out each individual’s trajectory while playing the scene in PeTrack (Boltes and Seyfried Citation2013). For each subject, we identify the moment at which the subject initiates his/her (decisive) movement toward an exit. At this point, we would freeze the scene and record the frame number associated with that moment. By comparing that frame number to the frame number associated with the onset of the evacuation (i.e. the moment we produced the evacuation signal), we would calculate the difference and covert it to a reaction-time observation in terms of seconds. At that moment in time, we would also record the spatial coordinates of the subject at hand. By comparing those coordinates with the (mid-point) coordinates of the open exits (in that scenario), the distance to each exit is calculated. Through this calculation, the distance to the nearest exit is recorded for that reaction-time observation, consistent with our formulation in EquationEq. 1(1)
(1) .
Through these individual-level data extraction processes, 3685 observations of exit choice (3015 from Experiment I, and 670 from experiment II), 618 observations of exit-choice change (125 from Experiment I, 85 From Experiment II and 408 from Experiment III) and 851 observations of reaction time (all from Experiment III) were generated in total. Each of these three sets of observations were used to estimate their respective models using maximum likelihood estimation method (Haghani et al. Citation2016). All estimation calculations were performed using NLogit software (Greene Citation2007).
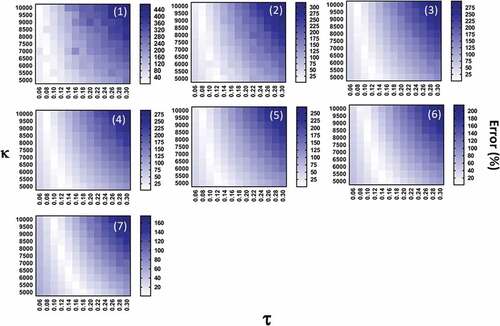
The two coefficients of the social force model, τ and κ were calibrated through seven individual observations of the total evacuation time generated from the bottleneck experiment (Experiment IV, ) (Haghani, Sarvi, and Shahhoseini Citation2019). The calibration process was based basically on minimizing the error between the simulated and observed total evacuation times at each different exit width. In this experiment, the exit width ranges from 60 cm to 120 cm at the increments of 10 cm. Unlike the decision-making modules, this layer was not directly calibrated from disaggregate data. Rather, it was calibrated through comparisons between the simulated and observed measurement of a certain aggregate metric, total evacuation time. Full details of this calibration can be accessed in (Haghani and Sarvi Citation2019d). The overall process involved selecting a certain range for both τ and κ values, considering all possible combinations between these two parameters within those ranges and simulating each experimental scenario (for 50 times) for each combination. The combinations that resulted in the least amount of relative error percentage (i.e. percentage difference between observed and simulated evacuation time associated with that exit width) were ‘shortlisted’ and the combinations that resided at the intersect of all ‘shortlists’ were selected as the calibrated values. provides a visualization illustration of the outcomes of this analysis in a heatmap-type plots. Each graph is associated with a certain width of exit, and the horizontal and vertical axes represent the parameter values for κ and τ. The simulation error associated with each parameter value has been color-coded, with brighter colors representing lesser error. As a result, the areas of each plot that are represented by white color are associated with the τ-κ combinations that produce the least amount of simulation error for that exit width (i.e. produce the best match with the experimental observations). Only a few combinations resided at the intersect of those white regions for all seven widths. The chosen values reported in are among those, though those combinations were not unique. There were other combinations that were almost equally good in minimizing the simulation error. Note that throughout the manuscript, the unit of κ is kg/(ms) and the unit of τ is seconds (s).
Figure 6. A visualisation of the parameter calibration process for the key parameters of the social force layer of our simulation model based on observations of the total evacuation time obtained from Experiment IV. Plots (1)-(6) are respectively related to the bottleneck scenarios with exit width 60cm-120cm. Regions of each graph with brighter colour represent the parameter combinations that produced the least amount of simulation error for that scenario. Note that, the scale of the plot legend does not need to match across different exit widths, because for each exit width, the best parameter combinations are chosen independent of the other exit widths. The chosen parameter combination is one that resides at the intersect of the ‘best parameter combinations list’ for all seven different widths.
4. Sensitivity analyses
4.1. Numerical simulations setup
The numerical tests were performed on eight different simulated setups. The purpose of the numerical tests was to put the sensitivity of the simulated evacuation time estimates (as the primary metric of the evacuation simulation) under test for various parameters of the model on a comparable scale. In undertaking these numerical tests, the main factors to be considered were as follows. (1) Each simulated setup had to be complex enough to require all main layers of the model (as outlined earlier) to be active (i.e. the agent needs to make all kinds of evacuation decisions embodied by the model), (2) the sensitivity analysis to parameters at all layers of the model needed to be made on a comparable scale, (3) the analyses were conducted only for the parameters that had been directly calibrated using experimental data, and (4) the default signs of the parameters were supposed to remain intact. For certain parameters (like those of the social force model) the sign can inherently and theoretically not change, and for others (like those of the exit choice model) changing the sign of the parameter would produce behavioral patterns against what have been established through empirical testing. Our intention was to investigate the relative sensitivity of the estimates to each parameter compared to those of others while all parameters act at the direction of influence that have already been theoretically or empirically established for them.
In order to maintain the abovementioned criteria, the numerical tests were designed as follows. For each given simulated setup, and for each calibration parameter, we varied the value of the parameter by decreasing and increasing it by a factor of up to 90% of the calibrated value of that parameter. In other words, for any given parameter, assuming that the calibrated value of that parameter is ψ, we examine all values like η×ψ where η varies between 0.1 and 1.9 at increments of 0.05 for η. In total, 13 parameters were subject of this analysis, and for each parameter, 37 different values were examined. For each of these single values, 100 simulation runs were repeated. The total evacuation time and mean evacuation time of the agents were averaged over those 100 repetitions of simulation.Footnote2 Therefore, the analysis required 8 (setups)×13 (parameters)×37 (values)×100 (repetitions) = 384,800 repetitions in total. We did not directly record the computation times. The computation time varies across the setups depending on the complexity of the geometry, the number of simulated agents for that setup and even the value of the parameters. But for a rough average of 60 secs of computation time for each run of the simulation, it is estimated that the analyses in total have taken more than 6,000 hours of computation. The computation load was distributed over ten computers and was completed over a course of four months.
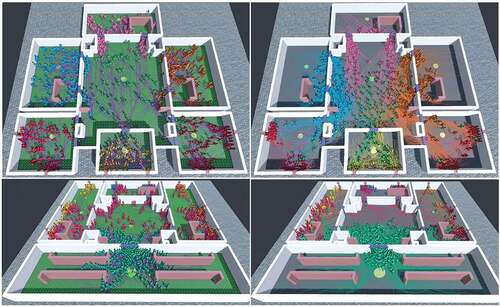
provide a snapshot from the visualization of all eight simulated setups (from here on, referred to as setups 1–8) as the computation is in progress. All setups were meant to simulate crowded spaces (spaces that are not heavily occupied are not subject of this analysis). Each setup needed to constitute a series of interconnected rooms with most rooms offering multiple intermediate exits to other rooms or to safety. At the onset of the evacuation, occupants exist in most spaces distributed at random positions in each room. The setups vary in terms of the shape of their geometry, the number of agents, the number of final exits (shown in red) and intermediate exits (shown in blue), and the dominant pattern of the movement in that space. summarizes some of the characteristics of these setups. For certain setups, the path to final exits required simulated occupants of multiple rooms to merge with each other and share certain spaces in order to reach the final exit(s). For those setups, we say that the simulated setup has a dominant merging pattern. For other setups, the dominant pattern is that occupants scatter and distribute through peripheral exits (i.e. diverge) in order to reach the final gates. These combinations were devised to create an adequate level of variability across the simulated setups in order to make sure that the findings are not exclusive to one particular setup or geometry. Any obstacle is assumed to have infinite height. The rooms in our setups have a maximum dimension of about 15 meters. In the online Supplementary Material, video samples of the simulation process for each of these eight setups (at the default calibration values) have been provided. Also, the trajectories, heatmaps of average velocities and heatmaps of average and maximum densities provided in the Appendix () provide more details on the pattern of movement that each simulated setup created.
Figure 7. Still images from the visualisation of the numerical calculation processes for setups 1–4. A video visualisation of the simulation process associated with each setup can be viewed and/or downloaded from the links below. Note that the videos are corresponding to simulation at default/calibrated parameters, and not any deviation from the calibrated values.

Figure 8. Still images from the visualisation of the numerical calculation processes for setups 5–8. A video visualisation of the simulation process associated with each setup can be viewed and/or downloaded from the links below. Note that the videos are corresponding to simulation at default/calibrated parameters, and not any deviation from the calibrated values.
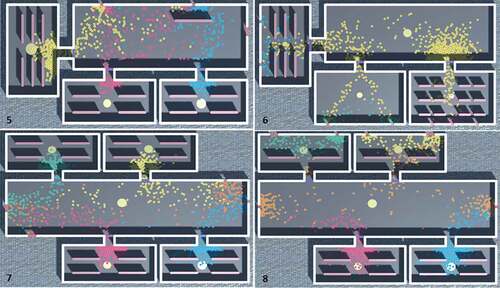
Table 4. The list of numerical simulation setups.
4.2. Identifying the most critical parameters
The primary results of the numerical testings using the computer simulated setups and the modeling platform described earlier are illustrated in (for simulated Setups 1–8 respectively). In each set of graphs (associated with one simulated setup) we have plotted the measurement outcomes for each parameter separately. In total, 13 different parameters were the subject of these numerical testings, therefore, each graph set consists of 13 different plots. Each plot visualizes the average of the total (simulated) evacuation time (denoted as Avg TET) as well as the average of the average individual evacuation time (denoted as Avg IET) associated with each parameter value on the left and right vertical axes and using solid blue lines and red dashed lines, respectively. The error band for each line-plot represents the standard deviation of the measurement. The horizontal access represents the value of the parameter through the scaling factor, η. At η = 1, the simulation is performed with the calibrated value of the parameter. Similarly, η>1 means that the absolute value of the parameter is magnified relative to its calibrated value, and η<1 indicates that the parameter value it reduced in its absolute value compared to the calibrated value. The value of η itself is stretched from 0.1 to 1.9 for each parameter. The vertical dashed line that is superimposed on each plot indicates the calibrated value of the parameter represented by that plot (i.e. η = 1). While the horizontal axes of all the plots are made consistent through the scaling factor, η that is common across them, the vertical axes are also made consistent in order for the sensitivities to be fully comparable across different parameters. The range of the vertical axis values associated with each graph set (i.e. associated with each simulated setup) is determined by the parameter to which the simulated measurements showed the highest degree of sensitivity. As a result, the range of the vertical axes is consistent for the plots associated with each simulated setup but they differ from graph set to graph set (i.e. they differ across the simulated setups).
Figure 9. Outcomes of the numerical analysis for the simulation setup 1. The variation of average of the total simulated evacuation time (denoted as Avg TET, shown with solid blue lines, presented on left vertical axes) as well as the average of the average individual evacuation time (denoted as Avg IET, shown with dotted red lines, presented on right vertical axes) associated with each parameter. The error bands represent standard deviation of the measurements. The horizontal access represents the value of the parameter through the scaling factor, η. At η=1, the simulation is performed with the calibrated value of the parameter.
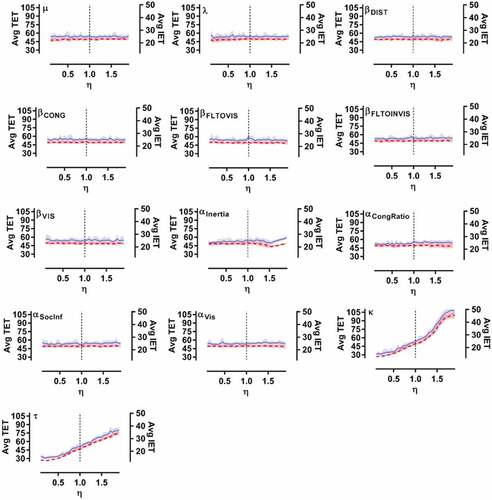
Figure 10. Outcomes of the numerical analysis for the simulation setup 2. The variation of average of the total simulated evacuation time (denoted as Avg TET, shown with solid blue lines, presented on left vertical axes) as well as the average of the average individual evacuation time (denoted as Avg IET, shown with dotted red lines, presented on right vertical axes) associated with each parameter. The error bands represent standard deviation of the measurements. The horizontal access represents the value of the parameter through the scaling factor, η. At η=1, the simulation is performed with the calibrated value of the parameter.
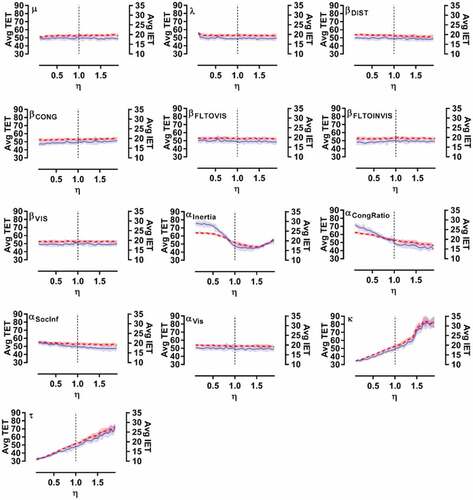
Figure 11. Outcomes of the numerical analysis for the simulation setup 3. The variation of average of the total simulated evacuation time (denoted as Avg TET, shown with solid blue lines, presented on left vertical axes) as well as the average of the average individual evacuation time (denoted as Avg IET, shown with dotted red lines, presented on right vertical axes) associated with each parameter. The error bands represent standard deviation of the measurements. The horizontal access represents the value of the parameter through the scaling factor, η. At η=1, the simulation is performed with the calibrated value of the parameter.
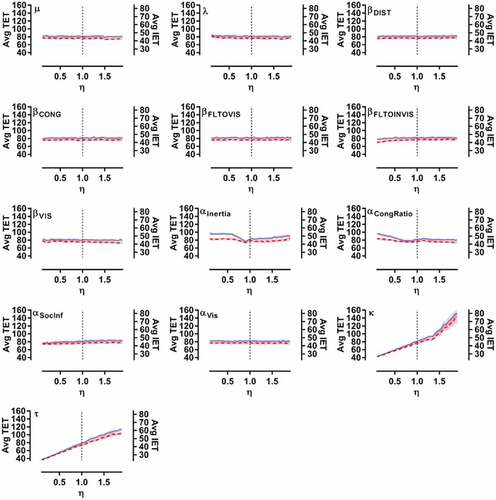
Figure 12. Outcomes of the numerical analysis for the simulation setup 4. The variation of average of the total simulated evacuation time (denoted as Avg TET, shown with solid blue lines, presented on left vertical axes) as well as the average of the average individual evacuation time (denoted as Avg IET, shown with dotted red lines, presented on right vertical axes) associated with each parameter. The error bands represent standard deviation of the measurements. The horizontal access represents the value of the parameter through the scaling factor, η. At η=1, the simulation is performed with the calibrated value of the parameter.
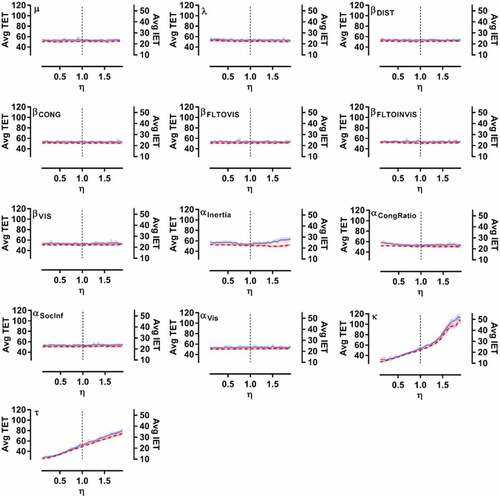
Figure 13. Outcomes of the numerical analysis for the simulation setup 5. The variation of average of the total simulated evacuation time (denoted as Avg TET, shown with solid blue lines, presented on left vertical axes) as well as the average of the average individual evacuation time (denoted as Avg IET, shown with dotted red lines, presented on right vertical axes) associated with each parameter. The error bands represent standard deviation of the measurements. The horizontal access represents the value of the parameter through the scaling factor, η. At η=1, the simulation is performed with the calibrated value of the parameter.
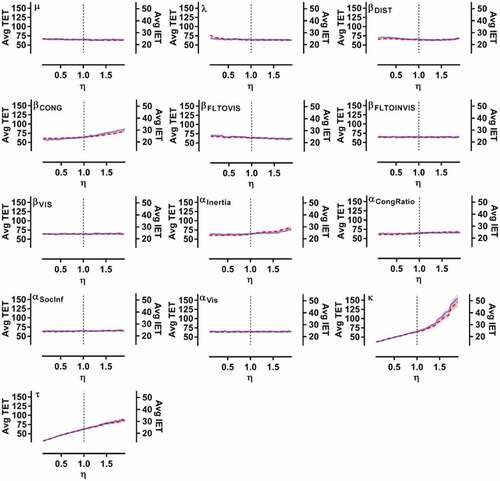
Figure 14. Outcomes of the numerical analysis for the simulation setup 6. The variation of average of the total simulated evacuation time (denoted as Avg TET, shown with solid blue lines, presented on left vertical axes) as well as the average of the average individual evacuation time (denoted as Avg IET, shown with dotted red lines, presented on right vertical axes) associated with each parameter. The error bands represent standard deviation of the measurements. The horizontal access represents the value of the parameter through the scaling factor, η. At η=1, the simulation is performed with the calibrated value of the parameter.
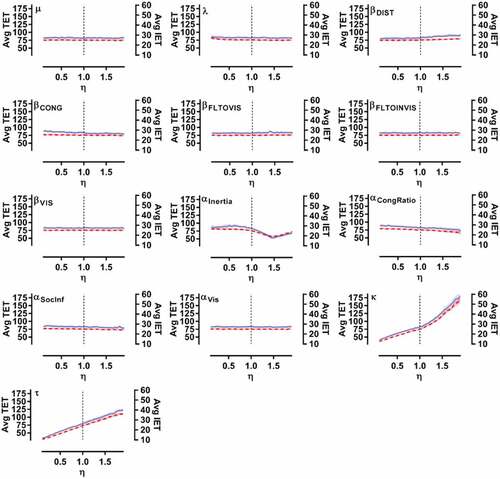
Figure 15. Outcomes of the numerical analysis for the simulation setup 7. The variation of average of the total simulated evacuation time (denoted as Avg TET, shown with solid blue lines, presented on left vertical axes) as well as the average of the average individual evacuation time (denoted as Avg IET, shown with dotted red lines, presented on right vertical axes) associated with each parameter. The error bands represent standard deviation of the measurements. The horizontal access represents the value of the parameter through the scaling factor, η. At η=1, the simulation is performed with the calibrated value of the parameter.
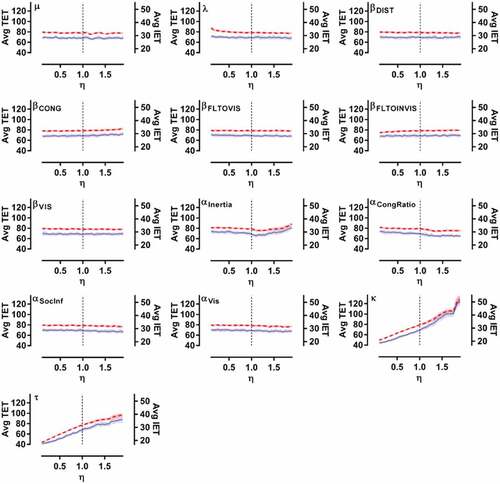
Figure 16. Outcomes of the numerical analysis for the simulation setup 8. The variation of average of the total simulated evacuation time (denoted as Avg TET, shown with solid blue lines, presented on left vertical axes) as well as the average of the average individual evacuation time (denoted as Avg IET, shown with dotted red lines, presented on right vertical axes) associated with each parameter. The error bands represent standard deviation of the measurements. The horizontal access represents the value of the parameter through the scaling factor, η. At η=1, the simulation is performed with the calibrated value of the parameter.
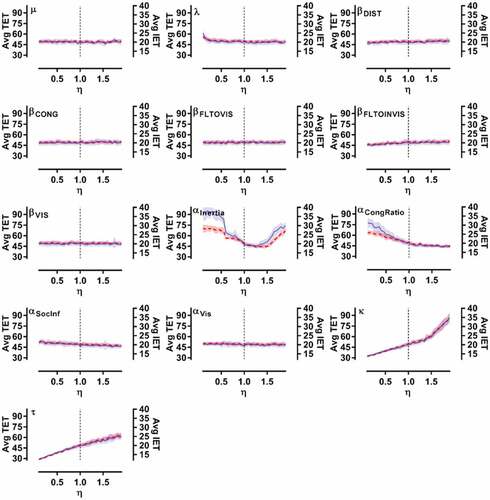
While the numerical results of these simulation testings showed certain degrees of case specificity, one aspect remained consistent across various setups. The outcome of the simulation is by far margin more sensitive to the two mechanical movement parameters, κ and τ, compared to the parameters related to the decision-making aspects. This is shown by the fact that, once we made the range of the vertical axes consistent across different plots for each setup, the sensitivity to most decision-making parameters paled into insignificance compared to the sensitivity to κ and τ values. As a result of this, the majority of the line plots appeared horizontal for these decision-making parameters. The level of sensitivity to these mechanical parameters was highly substantial. And between the two of them, the value of κ was even more critical. For example, according to the outcomes of the simulation analyses for Setup 1, the simulated total evacuation time may vary between 30 seconds and 105 seconds through stretching the value of κ by a factor of 90% to each direction (from its calibrated value). And these figures for Setup 2 are, respectively, 40 secs and 160 secs. The pattern of the variation of the simulation evacuation time in response to changing the value of τ was by and large linear across all eight setups but the pattern was more of a piecewise linear nature for κ, with the gradient of the change suddenly increasing for values greater than η≈1.5. Also, the pattern of variation was almost invariably consistent across our two measurements, total and average of individual evacuation times. This indicated that for analyses such as that of this work, as well as for evacuation optimization programming (Abdelghany et al. Citation2014) either of these two measures may be used interchangeably.
The results of this part of the analyses indicated that, for complex, geometric setups that involve interconnected spaces and relatively large crowds compared to the exit capacities of the space (i.e. where capacity is restrictive and bottlenecks ought to be created as a result), the sensitivity of the simulated measures of evacuation to the mechanical movement parameters (in particular, those that determine the flowrate at bottlenecks) outweigh the sensitivity to decision-making parameters by a far margin.Footnote3 This means that for setups where the capacity of the space is such that bottlenecks are created, the simulated measures of total (or average individual) evacuation times are by far degrees dependant to how we specify the value of these mechanical parameters (those that determine the level of physical friction between individuals or the intensity of the movement drive of each individual). Altering the value of these parameters makes a great difference in our predictions in a way that altering the value of the decision-making parameters in most instances does not compare with it. Changing the value of these mechanical parameters by a factor of 50% of its original value, for example, can change the outcome of the simulated evacuation time by a factor of nearly 20% (according to Setup 1, as an example). Whereas making the same relative magnitude of alteration to the value of the decision-making parameters does not make such large difference in the simulated evacuation time. This does not, by any means, indicate that the patterns of movement in the simulation process will not change as the decision-making parameters are altered. Certain parameter specifications for these decision parameters produce less plausible and less accurate movement patterns, and their value do influence the outcome of the simulation. But this change of the collective movement pattern does not reflect as much in the evacuation time estimates as the change caused by the bottleneck-flowrate-related parameters. The practical implication of this observation is that a certain percentage of error in calibrating the value of these mechanical parameters biases our predictions at a much greater magnitude compared to the same percentage of error in calibrating decision-making parameters. Besides, it should be noted that the impact mis-specification of these mechanical parameters is hard to be detected visually, whereas for decision-making parameters, poor parameter setting will create implausible movement patterns that can often be visually observed.
It is also important to note that here, we are talking about the unilateral change of a single parameter value while other parameters are still set at their calibrated value. Therefore, the analyses are not meant to downplay or trivialize the significance of calibrating the decision-making parameters. Their importance will be more appreciated if did not have access to those based values calibrated directly through experiments and needed to set all these unspecified values simultaneously. The fact that all parameters other than the one that is subject of the sensitivity analysis are set at their appropriate values is a major factor in not allowing the outcomes to drastically change. In other words, a fully calibrated model may make single individual parameters to become robust to mis-estimation (or calibration error). For example, when a model includes a decision-changing module whose parameters are well calibrated, the model may become more robust to the mis-specification of the individual exit-choice parameters. In other words, even when the value of an individual exit-choice parameter is altered from its calibrated value, the mere fact that the agents are allowed to change their exit choices during their movement will alleviate the effect of mis-specifying the value of that single parameter at the exit-choice layer. Furthermore, other parameters of the exit-choice module will still be at their calibrated value and that too alleviates the unilateral effect of that single mis-specified exit-choice parameter. But the two mechanical movement parameters in our analyses, in comparison, have a more direct impact on the movement, and that effect is not necessarily compensated by other layers or parameters of the model. Also, here we are not considering cases of ‘gross parameter mis-estimation.’ Rather, the variation to the value of each individual parameter is within a range of 10% to 190% around its calibrated value. We did not consider cases where the sign of the parameter is specified incorrectly or the cases where the magnitude of the parameter is grossly mis-specified.
4.3. Inferring behavioral insights
Apart from the main purpose of this analysis, which was comparing the relative sensitivity of the aggregate simulated measures to the value of individual parameters at various modeling layers, there are also secondary outcomes offering behavioral insight to be drawn from such analyses. This is because of the fact that almost all individual parameters at the decision-making layers of the model employed in this work have certain behavioral interpretation. As a result, altering the value of those parameters is equivalent of altering certain aspects of evacuee’s behavior in certain directions. The impact of these behavioral modifications, however, was mostly masked out by the fact that we set the scale of the vertical axes in the same way across different parameters for each simulated setup. In order to obtain such type of insight from these numerical testings, we have singled out from each set of plots those other than the ones representing κ and τ that showed the greatest degree of sensitivity. We then replotted them by re-adjusting their vertical axis scale and customizing it for each plot in a way to effectively observe the pattern of variation within that graph.
These singled out plots are illustrated collectively in (for simulation setups 1–5) and (for simulation setups 6–8). The majority of the plots that made to this list (17 out of 25) are related to parameters related to exit-choice-changing layer of the model. Next is the parameters related to the exit-choice layer of the model (6 out of 25). Also, in two instances (two setups), the results showed considerable sensitivity to the value of the reaction time parameters of the model. Also, the majority of the exit-choice and exit-choice-changing parameters that made to this list were related to the inter-individual interactions or the so-called social influence parameters (such as CONG from the exit-choice layer and CongRatio and SocInf from the exit-choice-changing layer). An exception to this is the Inertia parameter which is not related to social interactions but has appeared 8 times in this list, more than any other parameter.
Figure 17. Outcomes of the numerical analysis for a selected subset of parameters (except for the social force parameters) to which the simulated evacuation times showed most amount of sensitivity in setups 1–5. The scale of the vertical axis has been adjusted and customised for each graph in order to better display the degree of variation.
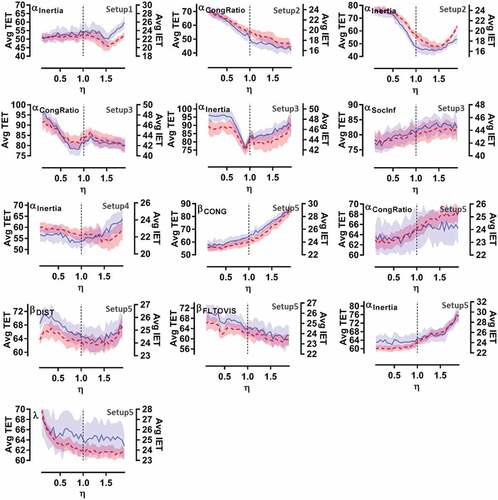
Figure 18. Outcomes of the numerical analysis for a selected subset of parameters (except for the social force parameters) to which the simulated evacuation times showed most amount of sensitivity in setups 6–8. The scale of the vertical axis has been adjusted and customised for each graph in order to better display the degree of variation.
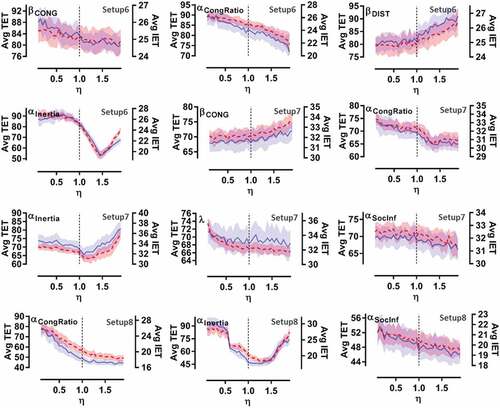
Sensitivity to the Inertia parameter. The inertia parameter is directly correlated with the frequency of the exit-choice changes without regard to the contextual variables at the moment of simulated time when the decision change possibility is offered to the simulated agent. Greater absolute values for this parameter means that the agent is more resistant toward changing the initial exit decision. Smaller values, on the other hand, generate greater likelihood for the agent to change its initial exit choice. The estimation of the simulated evacuation time showed substantial sensitivity to the value of this parameter in all eight setups that we examined. This indicates that the frequency and likelihood of decision changing is a major factor that determines (1) the prediction of the simulated evacuation time in computational settings and (2) the actual evacuation time in real-world scenarios. The pattern of the variation of the evacuation time with respect to the value of this parameter showed very little degrees of case specificity. With the exception of Setup 5 where the simulated evacuation time varies rather monotonically with respect to the scale factor η, in other cases there is a minimum in the plot at the intermediate values of the scale factor. This indicates that during an evacuation process, certain intermediate degrees of ‘openness’ to revising exit choices by individuals will collectively result in better outcomes (i.e. shorter evacuation times) for the system. It appears that neither of the two strategies of ‘too much inertia’ or ‘or too little inertia’ are the optimum level of tendency in regard to the exit-choice changing behavior. Rather, an intermediate degree of inertia is often most optimum for the system. Also, interestingly, this minimum point often occurred in our analyses at scale values of η>1. Considering that η = 1 is associated with the calibrated value for the inertia parameter reflecting the natural (observed) tendency of people, this indicates that systems of crowd evacuation could potentially become more efficient by having people to increase their openness or willingness to be more actively adaptive in terms of their exit choices. This could be one of the ways through which one can make improvements in evacuation efficiency through simple behavioral modifications.
Sensitivity to the CongRatio parameter. The CongRatio parameter of the decision-changing model also correlates with the frequency of the exit-choice changes by relating the likelihood of change to the extent of the queue-size imbalance at exits. Greater absolute values for this parameter mean that the simulated agent is more sensitive to the presence and extent of the congestion imbalance, and is thus, more likely to make a decision change when such imbalance exists (i.e. when the previously chosen exit is performing relatively poorly in terms of the queue size compared to the least congested exit in that room). Smaller absolute values mean that the agent take this factor less importantly in choosing between the change and status-quo options. The estimations of the simulated evacuation times in these analyses revealed that the system is considerably sensitive to the value of this parameter. In 6 out of the 8 cases that we examined, the sensitivity was readily noticeable. With little variability across these setups, the simulation outcomes suggest that greater values for this parameter results in shorter evacuation times. This indicates that when individual evacuees show greater sensitivity to the relative performance of their previously chosen exit, the process of evacuation becomes more efficient and that pattern is rather monotonic, meaning that this greater sensitivity is almost invariably beneficial to the system.
Sensitivity to the SocInf parameter. The SocInf parameter of the decision-changing model correlates with the frequency of the exit-choice changes by relating the probability of change to whether or not other people have made decision changes from that exit moments earlier. Greater absolute values for this parameter mean that the simulated evacuee is more sensitive to observing other people making decision changes and is more likely to imitate those who make decision change right before him/her. Similarly, smaller absolute values mean that neighbors’ behavior has little effect on the decision changing probability. In relative terms, the impact of this parameter’s value on the system was less noticeable, at least compared to the Inertia and CongRatio parameters. But in certain setups, like Setup 3, 7 and 8, very moderate degrees of system sensitivity were observed. The pattern of variation of the evacuation time was, however, case specific. In Setup 3, greater values mean longer evacuation times meaning that imitation in exit-choice changing was detrimental. But in Setups 7 and 8, the pattern of variation was decreasing (though at a non-steep slope) meaning that imitation in exit-choice changing was beneficial. However, it is important for us to emphasize that in terms of the magnitude of the impact, this parameter was not so influential on the system performance.
Sensitivity to the DIST parameter. In two cases, Setups 5 and 6, we observed rather noticeable degree of evacuation time sensitivity to the DIST parameter of the exit-choice model. Greater absolute values of this parameter mean that the simulated evacuee has a greater preference for choosing exits that are closer, and smaller absolute values mean that the evacuee does not have a string preference for choosing the nearest exit. The variation of the evacuation time to the value of this parameter in Setup 5 showed a non-monotonic pattern with a minimum occurring at the intermediate values. Whereas for Setup 6, evacuation time monotonically increased as the absolute value of the DIST parameter increased, meaning that greater preference for choosing the nearest exit was detrimental to the overall evacuation process.
Sensitivity to the CONG parameter. The sensitivity of simulated evacuation times appeared to be noticeable to the value of the CONG parameter of the exit-choice model in three cases, Setups 5, 6 and 7. The value of this parameter determines the degree of relative weight that the evacuee gives to exit congestion factor when making exit choices. Greater absolute values of the parameter mean that the evacuee places a high level of priority on choosing less congested exits and smaller values indicate that the congestion becomes of less importance in exit-choice trade-offs. In Setup 5 and 7, greater values of the CONG parameter resulted in longer evacuation times, whereas in Setup 6, the opposite was the case.
Sensitivity to the λ parameter. The λ parameter of the reaction-time model is directly related to both mean and variance of the simulated reaction times, with smaller values resulting in greater mean and variance. In other words, when λ is set at smaller values, this results in greater average delay in movement initiation as well as greater variability in the movement initiation moment across evacuees. On the other hand, greater λ values result in more instant movement reactions by the population of simulated evacuees. In two cases, Setups 5 and 7, we observed rather noticeable dependency of the evacuation time on the value of this parameter, and in both cases, greater λ values resulted in shorter evacuation times. This indicates that in those cases, the system became more efficient when simulated evacuees showed a more instant reaction rather than delaying their movement initiation.
5. Conclusions
5.1. An overview of the contributions of the study
Simulation of a crowd evacuation process requires the analyst to specify the value of a range of measurable and non-measurable input parameters. The non-measurable inputs are often referred to as the calibration parameters. In agent-based micro-simulation models, the analyst needs to deal with a variety of these parameters and fine-tune their values in order to produce realistic outcomes. These parameters reflect various aspects of evacuee behavior and have important implications for the plausibility of predictions and simulated estimates.
This study is currently the only one that has looked comprehensively at all levels of parameters: strategic, tactical, and operational, i.e. a full-range analysis of calibration parameters. No other study has previously undertaken a full-range comparison, and this is exactly what motivated the current study. The closest that can be found to this work is the paper of Gödel, Fischer, and Köster (Citation2020), but that is also not a full-range analysis, and only focuses on bottleneck parameters. As a result, there is no contradictory observation (or compatible observation) to that of the current study in the literature. Full-range comparison of the relative importance of parameters requires simulation in complex setups, whereas most previous examinations of this kind have been conducted in the context of a single room with a single exit (Gödel, Fischer, and Köster Citation2020) or other non-complex environments such as that of a march or protest (Rahn et al. Citation2021), or pedestrian street crossing (Zhong and Cai Citation2015). Sensitivity analyses are also reported in the context of continuum crowd models (Hoogendoorn et al. Citation2014), but again, not considering the full range of parameters and not comparable with those of a microscopic agent-based model such as the model reported in this work.
This study was a first attempt to quantify and compare the relative impact of specifying the value of these various parameters on major simulation metrics, such as simulated evacuation times. In performing these analyses, we employed a multi-layer micro-simulation model whose decision-making layers are predominantly based on econometric choice and duration models. First, we provided an overall overview of how these various layers of the model can directly and separately be calibrated using individual-level observations collected from experimental settings. Having set these empirically calibrated parameter values as the benchmark and by introducing a scaling factor to amplify and reduce the value of various parameters on a consistent and comparable scale, we investigated the abovementioned question through an extensive set of numerical testing.
5.2. A summary of the main findings
Our numerical testings considered scenarios in which the simulated space is relatively complex in a way that it requires all kinds of decision-making layers to be active in the model. They also exclusively focused on scenarios where the occupancy level is high relative to the exit capacities in a way that it creates bottlenecks and relatively complex decision trade-offs during the process of evacuation. Our computational analyses revealed that, in such scenarios, the parameters of the mechanical movement layer of the model that determine the flowrates at bottlenecks are, by far, most impactful in terms of determining total evacuation times. A small percentage of change in the value of those parameters (relative to their calibrated values) caused considerable changes to the prediction of evacuation times. The magnitude of the impact was far greater than the magnitude of the impact resulted from similar percentage of change in the value of the decision-making parameters, such as those of exit choice layer. Followed by these parameters were the parameters that influence the exit-choice-changing behavior of the simulated evacuees. After the bottleneck parameters, the exit-choice changing parameters were those to which simulation outcome was most sensitive.
5.3. Implications for practice and commercial model development
Simulation of an evacuation is always subject to prediction and modeling error and every computational model will be, to some degrees, vulnerable to errors of various sources including those resulted from parameter misspecification. These observations, however, indicated that simulation of crowded scenarios is not equally sensitive to the calibration of the parameters of all layers. With certain parameters, a given percentage of error in calibration engenders greater error in terms of the simulated evacuation time (compared to the same percentage of error in calibration of other parameters). Therefore, if resources are limited for experimentation or data acquisition, those parameters should be prioritized. Also, these observations warrant that the analyst devise more rigorous methods, collect better quality data or increase the sample size, and perform further validation testing specifically for those particular parameters.
5.4. Implications for future research
In simple terms, it appears that, in order to predict evacuation times of crowded scenarios accurately, the most important aspect is getting the bottleneck flow rates right. That means that (i) we need further empirical testing and data collection on bottleneck flows (Geoerg et al. Citation2022, Citation2020, Citation2019; Haghani, Sarvi, and Shahhoseini Citation2019; Liao et al. Citation2014; Nicolas, Bouzat, and Kuperman Citation2017; Seyfried et al. Citation2010, Citation2009; Tian et al. Citation2012), (ii) we need to increase the accuracy of our empirical estimates for bottleneck flow rates (Daamen and Hoogendoorn Citation2012b; Tobias, Anna, and Michael Citation2006), and (iii) we need more rigorous methods for calibration of the bottleneck parameters (Daamen and Hoogendoorn Citation2012a). Otherwise, our efforts in making more sophisticated decision-making models or calibrating their parameters may be largely in vain.
The literature is making substantial progress in improving our empirical knowledge of bottleneck flows as one of the most extensively studied topics in crowd dynamics. The emerging empirical testings are showing how that the bottleneck capacity functions a whole range of factors other than the width of exits, factors such as the level of jam at the bottleneck (Cepolina Citation2009; Cepolina and Farina Citation2010; Ezaki, Yanagisawa, and Nishinari Citation2012; Yanagisawa et al. Citation2009; Yanagisawa and Nishinari Citation2007), the behavioral conduct of evacuees (Gwynne et al. Citation2009; Yanagisawa and Nishinari Citation2007) or the physical characteristics of the exit (Daamen and Hoogendoorn Citation2012b). We are observing mixed evidence regarding whether the capacity–width relationship is linear (Gwynne et al. Citation2009; Haghani Citation2020b; Hoogendoorn and Daamen Citation2005). In light of the findings presented here, it would be important to better establish these relationships using further experimentation. But equally important would be to establish whether our existing models are nuanced enough to accurately represent all these empirically established phenomena and interdependencies in relation to simulating bottleneck flows.
In our experience, we have also observed that certain sets of bottleneck parameters perform reasonably well for certain exit widths but not as much so for other exit widths. The set of the bottleneck parameters that we chose in our calibration process was a best compromise between these. We chose the set of values that overall showed best performance on various exit widths. That is because of the fact that there is a tendency to have one single set of calibration values for all circumstances in pedestrian simulation software and we concede that this may be one of the many factors that prevents us from achieving higher degrees of accuracy in evacuation simulation. A simple inspection of clearly shows that for different exit widths, different sets of τ and κ display the best performance. Therefore, in recognition of this observation, a key question would be why not making our bottleneck parameters width-specific? That could be only one way among many potential ways of improving the accuracy of estimating bottleneck throughput rates.
The previous statements were not meant to trivialize the significance of calibrating decision-making parameters in simulation models. To the contrary, we have indeed observed how these parameters can influence the plausibility of movement patterns and the simulated evacuation times. Our finding only highlights that ‘in relative terms’ fine-tuning the bottleneck throughputs have a larger impact, and thus, need to receive higher priority.
It is also interesting that among the decision-making parameters, those that comparatively had the most noticeable impact are those that have received the least amount of attention in the literature so far, i.e. the decision-changing parameters (Gwynne et al. Citation2000; Haghani and Sarvi Citation2019c). Within the last few years, a considerable amount of experimentation, data collection and modeling effort have been dedicated to exit-choice modeling (Bode and Codling Citation2013; Haghani and Sarvi Citation2016a, Citation2017; Liao, Wagoum, and Bode Citation2017; Lovreglio et al. Citation2014), whereas very little has been comparatively done toward decision adaptation aspect of the behavior (Dirk Citation2010; Gao, Frejinger, and Ben-Akiva Citation2010; Gwynne et al. Citation2000; Zhou, Nakanishi, and Asakura Citation2021a). The analyses in this work indicate that again, without an adequately accurate model of exit-choice changing, our efforts in developing more sophisticated exit-choice models might be wasted. It is imperative from the modeling perspective that we be able to maintain a consistent level of accuracy at various levels of these models, otherwise, perfecting one or two layer(s) and neglecting the others might not necessarily produce the desired outcome.
Another aspect of our study was the behavioral findings that we observed through performing the sensitivity analyses testing on decision-making parameters. Since decision-making parameters each carry certain behavioral implications, changing their value is basically equivalent of changing evacuees’ behavior and tendencies in decision-making. As Gwynne and Hunt (Citation2018) have rightly pointed out, these types of parametric agent-based models provide us with a valuable opportunity of turning the model to a ‘computational behavioral laboratory’ to examine the impact of various behavioral strategies on evacuation efficiency. We observed, for example, how lesser inertia in exit-choice making or more sensitivity to congestion imbalance can potentially shorten total evacuation times if adopted by individual evacuees. We believe this (i.e. behavioral optimization (Haghani Citation2020c)) could be a potentially overlooked approach in evacuation management, one whose benefit has not yet been fully explored (although there are signs that this approach is gradually gaining traction in the literature (Lopez-Carmona Citation2022; Lopez-Carmona and Garcia Citation2021) since it was introduced by Haghani (Citation2020c)). Within the framework of behavioral optimization, it is critical to note that our analyses are limited to single-factor (single-dimensional) analysis, and as such, they do not reflect the ‘conjoint/universal optimum’ set of parameters that result in the minimum evacuation time. In other words, the interactions between parameters are not represented here. Determination of such (universally optimum) set of parameters requires solving a multi-level optimization program and was left outside the scope of the current work.
5.5. Limitations and directions for follow-up studies
This work was limited to examining the impact of non-measurable inputs of simulation models, the behavioral parameters. However, measurable inputs (such as body size, body mass, desired velocity etc.) are also factors that may potentially make a great difference in terms of simulation estimates. There needs to be further analyses on those aspects in order to quantify their relative significance and to improve our empirical estimates for those inputs.
Also, here, we only limited our testings to a single platform of modeling. A question that is comparable to what we studied here concerns the degree to which the predictions are sensitive to different structures of modeling at various layers. For example, we used a combination of weighted shortest pathfinding algorithm and social-force model for our locomotion layer of modeling. It is not, however, clear to us to what degrees these simulation model outputs are sensitive to the use of alternative locomotion models such as those based on cellular automata methods (Bandini et al. Citation2011; Burstedde et al. Citation2001; Guan, Wang, and Chen Citation2016), or discrete choice walking behavior methods (Antonini, Bierlaire, and Weber Citation2006; Robin et al. Citation2009). Similarly, one may ask to what degrees the simulated outputs are sensitive to model specification at the decision-making layers. Would it make a meaningful difference, for example, if we shifted our exit-choice model from utility maximization to regret minimization (Haghani and Sarvi Citation2018b, Citation2019b) or our reaction time model from Cox-proportional Weibull to an equivalent Exponential model? Does model specification have a bigger impact on our predictions than parameter calibration? This constitutes a very fundamental question for the following reason. If investigations show that, for example, predictions of a general pedestrian simulation model do not change considerably when we switch from social force to cellular automata or discrete choice, then it would not matter which one is adopted by commercial software. But if the opposite is the case, then that makes it essential that research establishes which framework is more accurate and a better representation of behavior, and this will also have implications for the adoption of these models by commercial software.
All analyses of this work were conducted based on fixed-parameter econometric choice models (i.e. for the exit choice and exit choice adaptation layers). Alternatively, one may choose to calibrate and implement random-parameter choice models for those layers. An important question would be to investigate to what degrees such expansion would alter the results at the system level, and if there is any significant impact on system-level metrics, then how sensitive the outputs would be to the variance of the parameters as opposed to their means.
Parameter transferability is always a very challenging issue in calibrating pedestrian models. We tried to examine this issue, for example, by replicating the 2015 exit-choice experiments in a different setting in 2017 (Haghani and Sarvi Citation2019b). We obtained similar results and striking consistency, but we also have to acknowledge that, while the shape of the space was different across the two set of experiments, the spaces were still of comparable sizes. So, whether parameters calibrated in a small space can represent behavior in a large space remains a major and challenging question. Or more accurately said, the question is to what degrees can we stretch borders of applicability of these parameters? Are parameters calibrated in a small experimental room still applicable to evacuations of a stadium for example? Perhaps not. In relation to this work, however, it should be noted that while we have tried to create relatively complex and large spaces in our numerical simulation testings, these spaces are often composed of smaller sub-spaces (comparable to those of the experiments based on which the model has been calibrated), and that is what matters in terms of parameter transferability. In other words, while the overall simulated spaces in our numerical testing are big, the sub-spaces are still comparable to rooms where calibration data were extracted. In light of that, we caution against stretching these findings to vastly different settings such as stadiums or high-rise buildings. Dedicated numerical testings will be required for such settings if one wishes to establish whether the operational layer parameters are still the most critical parameters in those settings too. Our intuition suggests that operational parameters could still be most critical in any setting that bottlenecks are likely to be created, i.e. in any setting where door capacities are restrictive enough, relative to the degree of occupancy, to create bottlenecks and queues when there is a rush of demand to exits during emergencies.
Supplemental Material
Download MS Word (12.3 KB)Acknowledgments
Milad Haghani acknowledges the funding contribution that he received from the Australian Research Council, Grant No. DE210100440.
Disclosure statement
No potential conflict of interest was reported by the authors.
Supplemental data
Supplemental data for this article can be accessed online at https://doi.org/10.1080/19427867.2023.2195729
Additional information
Funding
Notes
1. The experiments were conducted for the ultimate purpose of developing/calibrating various layers of this crowd simulation model, although from each experiment, secondary findings and observations might have been obtained. But each experiment was mainly tailored to calibrating a specific modeling layer and its design was customized for that purpose.
2. Prior to choosing this number, extensive testings were conducted to determine how many repetitions leads to convergence of average evacuation time. In most cases, 30 repetition was practically enough. But conservatively, each simulation has been repeated 100 times for the purpose of this study and averages are taken over that many number of repetitions.
3. This particularly important given that in areas of high densities, our empirical knowledge is limited.
References
- Abdelghany, A., K. Abdelghany, H. Mahmassani, and W. Alhalabi. 2014. “Modeling Framework for Optimal Evacuation of Large-Scale Crowded Pedestrian Facilities.” European Journal of Operational Research 237 (3): 1105–1118. doi:10.1016/j.ejor.2014.02.054.
- Antonini, G., M. Bierlaire, and M. Weber. 2006. “Discrete Choice Models of Pedestrian Walking Behavior.” Transportation Research Part B: Methodological 40 (8): 40. doi:10.1016/j.trb.2005.09.006.
- Asano, M., T. Iryo, and M. Kuwahara. 2010. “Microscopic Pedestrian Simulation Model Combined with a Tactical Model for Route Choice Behaviour.” Transportation Research Part C: Emerging Technologies 18 (6): 842–855. doi:10.1016/j.trc.2010.01.005.
- Bandini, S., F. Rubagotti, G. Vizzari, and K. Shimura. 2011. “A Cellular Automata Based Model for Pedestrian and Group Dynamics: Motivations and First Experiments.” In Parallel Computing Technologies, edited by V. Malyshkin, 125–139. Berlin Heidelberg: Springer.
- Berrou, J. L., J. Beecham, P. Quaglia, M. A. Kagarlis, and A. Gerodimos. 2007. “Calibration and validation of the Legion simulation model using empirical data.” In Pedestrian and evacuation dynamics 2005, 167–181. Berlin Heidelberg: Springer.
- Bode, N. W. F., and E. A. Codling. 2013. “Human Exit Route Choice in Virtual Crowd Evacuations.” Animal Behaviour 86 (2): 347–358. doi:10.1016/j.anbehav.2013.05.025.
- Boltes, M., and A. Seyfried. 2013. “Collecting Pedestrian Trajectories.” Neurocomputing 100: 127–133. doi:10.1016/j.neucom.2012.01.036.
- Burstedde, C., K. Klauck, A. Schadschneider, and J. Zittartz. 2001. “Simulation of Pedestrian Dynamics Using a Two-Dimensional Cellular Automaton.” Physica A: Statistical Mechanics and Its Applications 295 (3–4): 507–525. doi:10.1016/S0378-4371(01)00141-8.
- Cepolina, E. M. 2009. “Phased Evacuation: An Optimisation Model Which Takes into Account the Capacity Drop Phenomenon in Pedestrian Flows.” Fire Safety Journal 44 (4): 532–544. doi:10.1016/j.firesaf.2008.11.002.
- Cepolina, E. M., and A. Farina (2010). A Pedestrian Movement Model That Takes into Account the Capacity Drop Phenomenon in the Motion of Crowd. In Cellular Automata: 9th International Conference on Cellular Automata for Research and Industry, ACRI 2010, Ascoli Piceno, Italy September 21-24. Cellular Automata: 9th International Conference on Cellular Automata for Research and Industry, ACRI 2010 (pp. 446–454). Springer Ascoli Piceno, Italy.
- Chraibi, M., M. Freialdenhoven, A. Schadschneider, and A. Seyfried. 2013. “Modeling the Desired Direction in a Force-Based Model for Pedestrian Dynamics.” In Traffic and Granular Flow ’11, edited by V. V. Kozlov, A. P. Buslaev, A. S. Bugaev, M. V. Yashina, A. Schadschneider, and M. Schreckenberg, 263–275. Berlin Heidelberg: Springer.
- Chraibi, M., U. Kemloh, A. Schadschneider, and A. Seyfried. 2011. “Force-Based Models of Pedestrian Dynamics.” Networks & Heterogeneous Media 6 (3): 425. doi:10.3934/nhm.2011.6.425.
- Chraibi, M., A. Seyfried, and A. Schadschneider. 2010. “Generalized Centrifugal Force Model for Pedestrian Dynamics.” Physical Review E 82 (4). doi:10.1103/PhysRevE.82.046111.
- Corbetta, A., A. Muntean, and K. Vafayi. 2015. “Parameter Estimation of Social Forces in Pedestrian Dynamics Models via a Probabilistic Method.” Mathematical Biosciences and engineering 12 (2): 337–356. doi:10.3934/mbe.2015.12.337.
- Crociani, L., Y. Zeng, G. Vizzari, and S. Bandini. 2018. “Shape Matters: Modelling, Calibrating and Validating Pedestrian Movement Considering Groups.” Simulation Modelling Practice and Theory 87: 73–91. doi:10.1016/j.simpat.2018.06.001.
- Cui, X., and H. Shi. 2011. “A*-Based Pathfinding in Modern Computer Games.” International Journal of Computer Science and Network Security 11: 125–130.
- Daamen, W., and S. Hoogendoorn. 2012a. “Calibration of Pedestrian Simulation Model for Emergency Doors by Pedestrian Type.” Transportation Research Record: Journal of the Transportation Research Board 2316 (1): 69–75. doi:10.3141/2316-08.
- Daamen, W., and S. Hoogendoorn. 2012b. “Emergency Door Capacity: Influence of Door Width, Population Composition and Stress Level.” Fire Technology 48 (1): 55–71. doi:10.1007/s10694-010-0202-9.
- Dias, C., M. Iryo-Asano, H. Nishiuchi, and T. Todoroki. 2018. “Calibrating a Social Force Based Model for Simulating Personal Mobility Vehicles and Pedestrian Mixed Traffic.” Simulation Modelling Practice and Theory 87: 395–411. doi:10.1016/j.simpat.2018.08.002.
- Dias, C., and R. Lovreglio. 2018. “Calibrating Cellular Automaton Models for Pedestrians Walking Through Corners.” Physics Letters A 382 (19): 1255–1261. doi:10.1016/j.physleta.2018.03.022.
- Dirk, H. 2010. “Adaptive Pedestrian Dynamics Based on Geodesics.” New Journal of Physics 12 (4): 043032. doi:10.1088/1367-2630/12/4/043032.
- Ezaki, T., D. Yanagisawa, and K. Nishinari. 2012. “Pedestrian Flow Through Multiple Bottlenecks.” Physical Review E - Statistical, Nonlinear, and Soft Matter Physics 86 (2). doi:10.1103/PhysRevE.86.026118.
- Gao, S., E. Frejinger, and M. Ben-Akiva. 2010. “Adaptive Route Choices in Risky Traffic Networks: A Prospect Theory Approach.” Transportation Research Part C: Emerging Technologies 18 (5): 727–740. doi:10.1016/j.trc.2009.08.001.
- Geoerg, P., J. Schumann, M. Boltes, and M. Kinateder. 2022. “How People with Disabilities Influence Crowd Dynamics of Pedestrian Movement Through Bottlenecks.” Scientific Reports 12 (1): 1–16. doi:10.1038/s41598-022-18142-7.
- Geoerg, P., J. Schumann, S. Holl, M. Boltes, and A. Hofmann. 2020. “The Influence of Individual Impairments in Crowd Dynamics.” Fire and Materials 45 (4): 529–542. n/a. doi:10.1002/fam.2789.
- Geoerg, P., J. Schumann, S. Holl, and A. Hofmann. 2019. “The Influence of Wheelchair Users on Movement in a Bottleneck and a Corridor.” Journal of Advanced Transportation 2019: 1–17. doi:10.1155/2019/9717208.
- Gödel, M., R. Fischer, and G. Köster. 2020. “Sensitivity Analysis for Microscopic Crowd Simulation.” Algorithms 13 (7): 162. doi:10.3390/a13070162.
- Greene, W. 2007. NLOGIT: Version 4.0, User Manual. Econometric Software. New York. Inc.
- Guan, J., K. Wang, and F. Chen. 2016. “A Cellular Automaton Model for Evacuation Flow Using Game Theory.” Physica A: Statistical Mechanics and Its Applications 461: 655–661. doi:10.1016/j.physa.2016.05.062.
- Gwynne, S., E. Galea, P. Lawrence, M. Owen, and L. Filippidis. 2000. “Adaptive Decision-Making in Building EXODUS in Response to Exit Congestion.” Fire Safety Science 6: 1041–1052. doi:10.3801/IAFSS.FSS.6-1041.
- Gwynne, S., E. R. Galea, M. Owen, P. J. Lawrence, and L. Filippidis. 2005. “A Systematic Comparison of buildingExodus Predictions with Experimental Data from the Stapelfeldt Trials and the Milburn House Evacuation.” Applied Mathematical Modelling 29 (9): 818–851. doi:10.1016/j.apm.2004.11.005.
- Gwynne, S. M. V., and A. L. E. Hunt. 2018. “Why Model Evacuee Decision-Making?” Safety Science 110: 457–466. doi:10.1016/j.ssci.2018.02.016.
- Gwynne, S. M. V., E. D. Kuligowski, J. Kratchman, and J. A. Milke. 2009. “Questioning the Linear Relationship Between Doorway Width and Achievable Flow Rate.” Fire Safety Journal 44 (1): 80–87. doi:10.1016/j.firesaf.2008.03.010.
- Haghani, M. 2020a. “Empirical Methods in Pedestrian, Crowd and Evacuation Dynamics: Part I. Experimental Methods and Emerging Topics.” Safety Science 129: 104743. doi:10.1016/j.ssci.2020.104743.
- Haghani, M. 2020b. “Empirical Methods in Pedestrian, Crowd and Evacuation Dynamics: Part II. Field Methods and Controversial Topics.” Safety Science 129: 104760. doi:10.1016/j.ssci.2020.104760.
- Haghani, M. 2020c. “Optimising Crowd Evacuations: Mathematical, Architectural and Behavioural Approaches.” Safety Science 128: 104745. doi:10.1016/j.ssci.2020.104745.
- Haghani, M. 2021. “The Notion of Validity in Experimental Crowd Dynamics.” SSRN Electronic Journal arXiv preprint arXiv:2112.10673. doi:10.2139/ssrn.3974364.
- Haghani, M., and M. Sarvi. 2016a. “Human Exit Choice in Crowded Built Environments: Investigating Underlying Behavioural Differences Between Normal Egress and Emergency Evacuations.” Fire Safety Journal 85: 1–9. doi:10.1016/j.firesaf.2016.07.003.
- Haghani, M., and M. Sarvi. 2016b. “Pedestrian Crowd Tactical-Level Decision Making During Emergency Evacuations.” Journal of Advanced Transportation 50 (8): 1870–1895. n/a-n/a. doi:10.1002/atr.1434.
- Haghani, M., and M. Sarvi. 2017. “Stated and Revealed Exit Choices of Pedestrian Crowd Evacuees.” Transportation Research Part B: Methodological 95: 238–259. doi:10.1016/j.trb.2016.10.019.
- Haghani, M., and M. Sarvi. 2018a. “Crowd Behaviour and Motion: Empirical Methods.” Transportation Research Part B: Methodological 107: 253–294. doi:10.1016/j.trb.2017.06.017.
- Haghani, M., and M. Sarvi. 2018b. “Hypothetical Bias and Decision-Rule Effect in Modelling Discrete Directional Choices.” Transportation Research Part A: Policy and Practice 116: 361–388. doi:10.1016/j.tra.2018.06.012.
- Haghani, M., and M. Sarvi. 2019a. “Herding’ in Direction Choice-Making During Collective Escape of Crowds: How Likely is It and What Moderates It?” Safety Science 115: 362–375. doi:10.1016/j.ssci.2019.02.034.
- Haghani, M., and M. Sarvi. 2019b. “Laboratory Experimentation and Simulation of Discrete Direction Choices: Investigating Hypothetical Bias, Decision-Rule Effect and External Validity Based on Aggregate Prediction Measures.” Transportation Research Part A: Policy and Practice 130: 134–157. doi:10.1016/j.tra.2019.09.040.
- Haghani, M., and M. Sarvi. 2019c. “Simulating Dynamics of Adaptive Exit-Choice Changing in Crowd Evacuations: Model Implementation and Behavioural Interpretations.” Transportation Research Part C: Emerging Technologies 103: 56–82. doi:10.1016/j.trc.2019.04.009.
- Haghani, M., and M. Sarvi. 2019d. “Simulating Pedestrian Flow Through Narrow Exits.” Physics Letters A 383 (2–3): 110–120. doi:10.1016/j.physleta.2018.10.029.
- Haghani, M., M. Sarvi, and A. Rajabifard. 2018. “Simulating Indoor Evacuation of Pedestrians: The Sensitivity of Predictions to Directional-Choice Calibration Parameters.” Transportation Research Record 2672 (1): 171–182. doi:10.1177/0361198118796351.
- Haghani, M., M. Sarvi, and Z. Shahhoseini. 2015. “Accommodating Taste Heterogeneity and Desired Substitution Pattern in Exit Choices of Pedestrian Crowd Evacuees Using a Mixed Nested Logit Model.” Journal of Choice Modelling 16: 58–68. doi:10.1016/j.jocm.2015.09.006.
- Haghani, M., M. Sarvi, and Z. Shahhoseini. 2019. “When ‘Push’ Does Not Come to ‘Shove’: Revisiting ‘Faster is slower’ in Collective Egress of Human Crowds.” Transportation Research Part A: Policy and Practice 122: 51–69. doi:10.1016/j.tra.2019.02.007.
- Haghani, M., M. Sarvi, and Z. Shahhoseini. 2020. “Evacuation Behaviour of Crowds Under High and Low Levels of Urgency: Experiments of Reaction Time, Exit Choice and Exit-Choice Adaptation.” Safety Science 126: 104679. doi:10.1016/j.ssci.2020.104679.
- Haghani, M., M. Sarvi, Z. Shahhoseini, M. Boltes, and J. Jing. 2016. “How Simple Hypothetical-Choice Experiments Can Be Utilized to Learn Humans’ Navigational Escape Decisions in Emergencies.” Plos One 11 (11): e0166908. doi:10.1371/journal.pone.0166908.
- Helbing, D., I. Farkas, and T. Vicsek. 2000. “Simulating Dynamical Features of Escape Panic.” Nature 407 (6803): 487–490. doi:10.1038/35035023.
- Hollander, Y., and R. Liu. 2008. “The Principles of Calibrating Traffic Microsimulation Models.” Transportation 35 (3): 347–362. doi:10.1007/s11116-007-9156-2.
- Hoogendoorn, S. P., and W. Daamen. 2005. “Pedestrian Behavior at Bottlenecks.” Transportation Science 39 (2): 147–159. doi:10.1287/trsc.1040.0102.
- Hoogendoorn, S. P., F. L. M. van Wageningen-Kessels, W. Daamen, and D. C. Duives. 2014. “Continuum Modelling of Pedestrian Flows: From Microscopic Principles to Self-Organised Macroscopic Phenomena.” Physica A: Statistical Mechanics and Its Applications 416: 684–694. doi:10.1016/j.physa.2014.07.050.
- Ibrahim, A. M., I. Venkat, and P. De Wilde. 2019. “The Impact of Potential Crowd Behaviours on Emergency Evacuation: An Evolutionary Game Theoretic Approach.” Journal of Artificial Societies and Social Simulation 22 (1). doi:10.18564/jasss.3837.
- Kinateder, M., B. Comunale, and W. H. Warren. 2018. “Exit Choice in an Emergency Evacuation Scenario is Influenced by Exit Familiarity and Neighbor Behavior.” Safety Science 106: 170–175. doi:10.1016/j.ssci.2018.03.015.
- Kinateder, M., M. Müller, M. Jost, A. Mühlberger, and P. Pauli. 2014. “Social Influence in a Virtual Tunnel Fire – Influence of Conflicting Information on Evacuation Behavior.” Applied Ergonomics 45 (6): 1649–1659. doi:10.1016/j.apergo.2014.05.014.
- Kinateder, M., E. Ronchi, D. Gromer, M. Müller, M. Jost, M. Nehfischer, A. Mühlberger, and P. Pauli. 2014. “Social Influence on Route Choice in a Virtual Reality Tunnel Fire.” Transportation Research Part F, Traffic Psychology and Behaviour 26: 116–125. Part A. doi:10.1016/j.trf.2014.06.003.
- Ko, M., T. Kim, and K. Sohn. 2013. “Calibrating a Social-Force-Based Pedestrian Walking Model Based on Maximum Likelihood Estimation.” Transportation 40 (1): 91–107. doi:10.1007/s11116-012-9411-z.
- Köster, G., and M. Gödel. 2015. “Implementation Issues of Force Based Pedestrian Motion Models.” In Traffic and Granular Flow ’13, edited by M. Chraibi, M. Boltes, A. Schadschneider, and A. Seyfried, 63–71, Springer International Publishing.
- Kretz, T., K. Lehmann, and I. Hofsäß. 2014. “User Equilibrium Route Assignment for Microscopic Pedestrian Simulation.” Advances in Complex Systems 17 (02): 17. doi:10.1142/S0219525914500106.
- Kretz, T., J. Lohmiller, and P. Sukennik. 2018. “Some Indications on How to Calibrate the Social Force Model of Pedestrian Dynamics.” Transportation Research Record 2672 (20): 228–238. doi:10.1177/0361198118786641.
- Liao, W., A. Seyfried, J. Zhang, M. Boltes, X. Zheng, and Y. Zhao. 2014. “Experimental Study on Pedestrian Flow Through Wide Bottleneck.” Transportation Research Procedia 2: 26–33. doi:10.1016/j.trpro.2014.09.005.
- Liao, W., A. U. K. Wagoum, and N. W. Bode. 2017. “Route Choice in Pedestrians: Determinants for Initial Choices and Revising Decisions.” Journal of the Royal Society Interface 14 (127): 20160684. doi:10.1098/rsif.2016.0684.
- Li, M., Y. Zhao, L. He, W. Chen, and X. Xu. 2015. “The Parameter Calibration and Optimization of Social Force Model for the Real-Life 2013 Ya’an Earthquake Evacuation in China.” Safety Science 79: 243–253. doi:10.1016/j.ssci.2015.06.018.
- Lopez-Carmona, M. A. 2022. “System Identification for the Design of Behavioral Controllers in Crowd Evacuations.” Transportation Research Part C: Emerging Technologies 144: 103913. doi:10.1016/j.trc.2022.103913.
- Lopez-Carmona, M. A., and A. P. Garcia. 2021. “CellEvac: An Adaptive Guidance System for Crowd Evacuation Through Behavioral Optimization.” Safety Science 139: 105215. doi:10.1016/j.ssci.2021.105215.
- Lovreglio, R., D. Borri, L. Dell’olio, and A. Ibeas. 2014. “A Discrete Choice Model Based on Random Utilities for Exit Choice in Emergency Evacuations.” Safety Science 62: 418–426. doi:10.1016/j.ssci.2013.10.004.
- Lovreglio, R., E. Ronchi, and D. Borri. 2014. “The Validation of Evacuation Simulation Models Through the Analysis of Behavioural Uncertainty.” Reliability Engineering & System Safety 131: 166–174. doi:10.1016/j.ress.2014.07.007.
- Lovreglio, R., E. Ronchi, and D. Nilsson. 2015. “Calibrating Floor Field Cellular Automaton Models for Pedestrian Dynamics by Using Likelihood Function Optimization.” Physica A: Statistical Mechanics and Its Applications 438: 308–320. doi:10.1016/j.physa.2015.06.040.
- Mohd Ibrahim, A., I. Venkat, and P. D. Wilde. 2017. “Uncertainty in a Spatial Evacuation Model.” Physica A: Statistical Mechanics and Its Applications 479: 485–497. doi:10.1016/j.physa.2017.03.024.
- Moussaïd, M., M. Kapadia, T. Thrash, R. W. Sumner, M. Gross, D. Helbing, and C. Hölscher. 2016. “Crowd Behaviour During High-Stress Evacuations in an Immersive Virtual Environment.” Journal of the Royal Society Interface 13 (122): 20160414. doi:10.1098/rsif.2016.0414.
- Muir, H. C., D. M. Bottomley, and C. Marrison. 1996. “Effects of Motivation and Cabin Configuration on Emergency Aircraft Evacuation Behavior and Rates of Egress.” The International Journal of Aviation Psychology 6 (1): 57–77. doi:10.1207/s15327108ijap0601_4.
- Nicolas, A., S. Bouzat, and M. N. Kuperman. 2017. “Pedestrian Flows Through a Narrow Doorway: Effect of Individual Behaviours on the Global Flow and Microscopic Dynamics.” Transportation Research Part B: Methodological 99: 30–43. doi:10.1016/j.trb.2017.01.008.
- Park, B., and J. Schneeberger. 2003. “Microscopic Simulation Model Calibration and Validation: Case Study of VISSIM Simulation Model for a Coordinated Actuated Signal System.” Transportation Research Record: Journal of the Transportation Research Board 1856 (1): 185–192. doi:10.3141/1856-20.
- Rahn, S., M. Gödel, R. Fischer, and G. Köster. 2021. “Dynamics of a Simulated Demonstration March: An Efficient Sensitivity Analysis.” Sustainability 13 (6): 3455. doi:10.3390/su13063455.
- Robin, T., G. Antonini, M. Bierlaire, and J. Cruz. 2009. “Specification, Estimation and Validation of a Pedestrian Walking Behavior Model.” Transportation Research Part B: Methodological 43 (1): 36–56. doi:10.1016/j.trb.2008.06.010.
- Seyfried, A., M. Boltes, J. Kähler, W. Klingsch, A. Portz, T. Rupprecht, A. Schadschneider, B. Steffen, and A. Winkens. 2010. “Enhanced Empirical Data for the Fundamental Diagram and the Flow Through Bottlenecks.” In Pedestrian and Evacuation Dynamics 2008, edited by W. W. F. Klingsch, C. Rogsch, A. Schadschneider, and M. Schreckenberg, 145–156. Berlin Heidelberg: Springer.
- Seyfried, A., O. Passon, B. Steffen, M. Boltes, T. Rupprecht, and W. Klingsch. 2009. “New Insights into Pedestrian Flow Through Bottlenecks.” Transportation Science 43 (3): 395–406. doi:10.1287/trsc.1090.0263.
- Shipman, A., and A. Majumdar. 2018. “Fear in Humans: A Glimpse into the Crowd-Modeling Perspective.” Transportation Research Record 2672 (1): 0361198118787343. doi:10.1177/0361198118787343.
- Teknomo, K. 2006. “Application of Microscopic Pedestrian Simulation Model.” Transportation Research Part F, Traffic Psychology and Behaviour 9 (1): 15–27. doi:10.1016/j.trf.2005.08.006.
- Tian, W., W. Song, J. Ma, Z. Fang, A. Seyfried, and J. Liddle. 2012. “Experimental Study of Pedestrian Behaviors in a Corridor Based on Digital Image Processing.” Fire Safety Journal 47: 8–15. doi:10.1016/j.firesaf.2011.09.005.
- Tobias, K., G. Anna, and S. Michael. 2006. “Experimental Study of Pedestrian Flow Through a Bottleneck.” Journal of Statistical Mechanics: Theory and Experiment 2006 (10): 10014. doi:10.1088/1742-5468/2006/10/P10014.
- Wang, K., Z. Fu, Y. Li, and S. Qian. 2020. “Influence of Human-Obstacle Interaction on Evacuation from Classrooms.” Automation in Construction 116: 103234. doi:10.1016/j.autcon.2020.103234.
- Wang, K., X. Shi, A. P. Xuan Goh, and S. Qian. 2019. “A Machine Learning Based Study on Pedestrian Movement Dynamics Under Emergency Evacuation.” Fire Safety Journal 106: 163–176. doi:10.1016/j.firesaf.2019.04.008.
- Werberich, B. R., C. O. Pretto, and H. B. B. Cybis. 2015a. “Calibration of a Pedestrian Route Choice Model with a Basis in Friction Forces.” Transportation Research Record 2519 (1): 137–145. doi:10.3141/2519-15.
- Werberich, B. R., C. O. Pretto, and H. B. B. Cybis. 2015b. “Calibration of a Pedestrian Route Choice Model with a Basis in Friction Forces.” Transportation Research Record: Journal of the Transportation Research Board 2519 (1): 137–145. doi:10.3141/2519-15.
- Wolinski, D., J. G. S, A. H. Olivier, M. Lin, D. Manocha, and J. Pettré. 2014. “Parameter Estimation and Comparative Evaluation of Crowd Simulations.” Computer Graphics Forum 33 (2): 303–312. doi:10.1111/cgf.12328.
- Xu, Q., M. Chraibi, and A. Seyfried. 2021. “Prolonged Clogs in Bottleneck Simulations for Pedestrian Dynamics.” Physica A: Statistical Mechanics and Its Applications 573: 125934. doi:10.1016/j.physa.2021.125934.
- Yanagisawa, D., A. Kimura, R. Nishi, A. Tomoeda, and K. Nishinari. 2009. Theoretical and Empirical Study of Pedestrian Outflow Through an Exit, Distributed Autonomous Robotic Systems 8, 227–238. Springer.
- Yanagisawa, D., and K. Nishinari. 2007. “Mean-Field Theory for Pedestrian Outflow Through an Exit.” Physical Review E 76 (6): 061117. doi:10.1103/PhysRevE.76.061117.
- Zeng, W., P. Chen, H. Nakamura, and M. Iryo-Asano. 2014. “Application of Social Force Model to Pedestrian Behavior Analysis at Signalized Crosswalk.” Transportation Research Part C: Emerging Technologies 40: 143–159. doi:10.1016/j.trc.2014.01.007.
- Zeng, W., P. Chen, G. Yu, and Y. Wang. 2017. “Specification and Calibration of a Microscopic Model for Pedestrian Dynamic Simulation at Signalized Intersections: A Hybrid Approach.” Transportation Research Part C: Emerging Technologies 80: 37–70. doi:10.1016/j.trc.2017.04.009.
- Zhang, D., H. Zhu, L. Du, and S. Hostikka. 2018. “An Optimization-Based Overtaking Model for Unidirectional Pedestrian Flow.” Physics Letters A 382 (44): 3172–3180. doi:10.1016/j.physleta.2018.08.024.
- Zhang, D., H. Zhu, S. Hostikka, and S. Qiu. 2019. “Pedestrian Dynamics in a Heterogeneous Bidirectional Flow: Overtaking Behaviour and Lane Formation.” Physica A: Statistical Mechanics and Its Applications 525: 72–84. doi:10.1016/j.physa.2019.03.032.
- Zhong, J., and W. Cai. 2015. “Differential Evolution with Sensitivity Analysis and the Powell’s Method for Crowd Model Calibration.” Journal of Computational Science 9: 26–32. doi:10.1016/j.jocs.2015.04.013.
- Zhou, Z. -X., W. Nakanishi, and Y. Asakura. 2021a. “Data-Driven Framework for the Adaptive Exit Selection Problem in Pedestrian Flow: Visual Information Based Heuristics Approach.” Physica A: Statistical Mechanics and Its Applications 583: 126289. doi:10.1016/j.physa.2021.126289.
- Zhou, Z. -X., W. Nakanishi, and Y. Asakura. 2021b. “Route Choice in the Pedestrian Evacuation: Microscopic Formulation Based on Visual Information.” Physica A: Statistical Mechanics and Its Applications 562: 125313. doi:10.1016/j.physa.2020.125313.
Appendix
Figure A1 Visualization of the mass trajectories of simulated agents (subfigures (a)), maximum density (subfigures (b)), average density (subfigures (c)) and average velocity (subfigures (d)) for the simulation setups 1–4. The first component of each label signifies the number of the setup. The outputs are related to the calculations based on the default parameter setting of the numerical model.
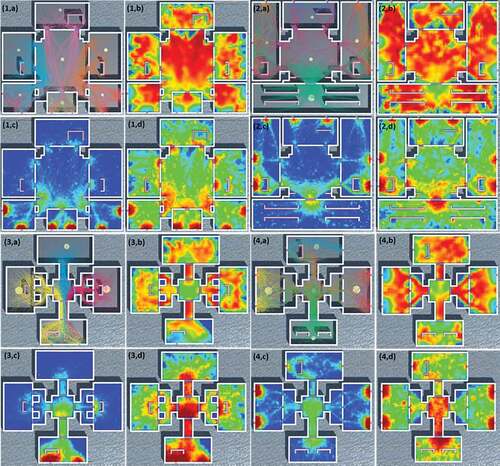
Figure A2 Visualization of the mass trajectories of simulated agents (subfigures (a)), maximum density (subfigures (b)), average density (subfigures (c)) and average velocity (subfigures (d)) for the simulation setups 5–8. The first component of each label signifies the number of the setup. The outputs are related to the calculations based on the default parameter setting of the numerical model.
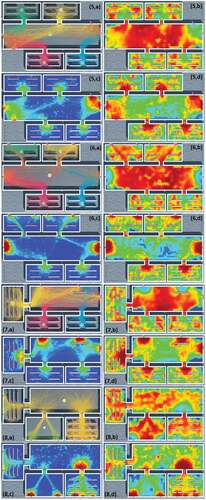
Figure A3 Legend for the heatmap plots in .
Figure A4 Three-dimensional visualization of the simulated evacuation process generated by the model for two example setups, with real-time path calculations (on the left) and the actual traversed trajectories (on the right) overlaid on the scene. Further videos demonstrating 3D visualisations of the simulation process can be downliaded from this link: https://unsw-my.sharepoint.com/:f:/g/personal/z3534847_ad_unsw_edu_au/EnRXneZRxQJAq9VGRkBqwq4BbFsqnUKYAfjYNLEHQolCQw?e=9SpyAD