
 ?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.
?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.Abstract
A modularized output formation tracking control for mixed-order multi-agent systems is investigated. The multi-agent systems are composed of first-order and second-order integrators. The stability and formation tracking performance are analysed theoretically by the mathematical induction method. Finally, the effectiveness of the proposed modularized output control protocol is verified by simulation examples.
1. Introduction
Formation control for multi-agent systems (MASs) is a research hotspot. With formation protocols, MASs such as multiple satellite systems (Li et al., Citation2022; Z. Zheng et al., Citation2019) and multiple UAV systems could form or maintain a specific formation shape to achieve large-scale missions cooperatively. Moreover, to achieve complex missions, agents belong to an MAS are expected to be homogeneous, so that agents could be complementary to each other. In this area, a lot of research results has been achieved (Liu et al., Citation2014; Wu et al., Citation2019; Xi et al., Citation2020; Zhang et al., Citation2020). However, consensus is generally considered in MASs formation control research.
The commonly used consensus protocol control strategy is to dynamically model each individual in the MASs according to the Kronecker product. Then, stabilize the MASs and redistribute the control law to each agent. What's more, this strategy usually requires the dimensions of the system matrix to be the same. At the same time, when the number of agents is too large, it will bring computational burden and reduce computational efficiency. In reality, heterogeneous MASs can adapt to some tasks flexibly. And heterogeneous MASs have different dimensions in some situations. Therefore, it is of great significance to design an efficient heterogeneous multi-agent control algorithm.
Tan et al. (Citation2018) investigated the output consensus problem of discrete-time heterogeneous MASs and designed a consensus protocol with a dynamic output feedback controller to solve the problem of state and control input dimensions differently. Wen et al. (Citation2020) transformed the output consensus problem into a stability problem by designing suitable controllers and state observers. Because the dimensionality of the system state variables may be different, which makes the research of heterogeneous MAS challenging. Therefore, some researches have begun to consider special MAS (the consensus of mixed-order MAS composed of first-order and second-order agents). The mixed-order MAS is simpler than other system models, and it is easier to get more intuition and simple conclusions. It is also easier to verify some conclusions and facilitate further research. The research on mixed-order MAS is a hot field. A distributed formation control protocol is designed for input saturation and unsaturated conditions to realize a heterogeneous MAS composed of first order and second order (Keer, Citation2017). Wang et al. (Citation2018) investigated the tracking consensus problem of mixed-order MAS with an intelligent leader. The leader adjusted the control protocol through the feedback information of neighbouring agents and then proposed a consensus protocol for intermittent control. Y. Zheng and Wang (Citation2012) presented a distributed consensus protocol for heterogeneous MASs with fixed topology and switched topology, which realized the Diagonalization of Laplace matrix under certain constraints. These papers design a distributed state observer for each agent and propose the corresponding control protocol. Duan (Citation2020) proposed the concept of the fully-actuated system. By combining the controllability and fully-actuated of the system, a new controllability system was established, and the controllability analysis and system control protocol design were associated and unified, so as to simplify the consensus problem of MASs.
The main contribution of this paper is designing a modularized formation control protocol based on fully actuation for the mixed-order MAS. Compared with the work in Tan et al. (Citation2018); Wen et al. (Citation2020); Y. Zheng Wang (Citation2012), a modularized protocol method without Kronecker product is proposed, and the output consensus and stability of the agents are analysed. And compared with the work in Wang et al. (Citation2018), the formation control for discrete-time mixed-order MASs can have multiple leaders. Compared with Xi et al. (Citation2020), the work is extended to a more general mixed-order MAS. Consider the dynamics of the first-order and second-order agents, and take the two adjacent adopting moments as one module in turn. The agents calculate the control law at the first sampling time in the module. For the second sampling time, the second-order agents are no longer calculated. Under certain conditions, the output consensus is proved to be achievable by graph theory and mathematical induction. Finally, the validity of the correlation results under leader–follower is verified by simulation.
The rest of this paper is arranged as follows. Some preliminaries, preliminary, useful definitions and hypotheses are stated in Section 2. In Section 3, we obtain the main results of discrete mixed-order MAS under unidirectional topology and verify the validity of the results through theoretical analysis. In Section 4, simulation examples are given to illustrate the theoretical results obtained in Section 3. This paper is concluded in Section 5.
2. Preliminaries and problem statements
In this paper, denote as a set of non-negative integer,
as the positive even number,
as the positive odd number,
as the set of
real matrices, and
as the set of n-dimensional real column vectors.
The interaction topology of MAS is described by a weighted directed graph , where
is the set of nodes.
represents the set of edges
,
is the weighted matrix,
if
, and
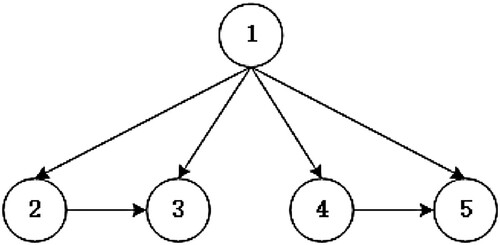
otherwise. Node 0 indicates the ‘formation planner’, other nodes are agents with the corresponding indexes. The formation planner is used to generate the desired trajectory. To describe the mixed-order MASs clearly, each agent has a corresponding index, numbered from top to bottom and left to right on the topology.
Definition 2.1
A digraph is unidirectional, as long as
has a spanning tree with Node 0 as root and
,
.
We assume that there are a total of N + M agents. The indexes of the first-order agents are all in set , and similarly, the indexes of second-order agents are all in set
. The dynamics of the ith second-order agent is described as
(1)
(1)
, where
, and
are the state and input vectors of the ith second-order agent, respectively. Moreover, the ith first-order agent has the following dynamics:
(2)
(2)
, where
, and
are the state and input vectors of the ith first-order agent, respectively. Connect control inputs of agents to zero-ordered holders, and maintain
constant during sample period T. The state description (Equation1
(1)
(1) ) and (Equation2
(2)
(2) ) of the mixed-order MAS can be transformed into (Equation3
(3)
(3) ) and (Equation4
(4)
(4) ).
(3)
(3) and
(4)
(4) where
. The dynamic description (Equation3
(3)
(3) ) and (Equation4
(4)
(4) ) of the MAS is iterated once to obtain Equation (Equation5
(5)
(5) ). If
,
, otherwise
.
(5)
(5) where
Compared with the general trajectory tracking problem, the time-varying formation tracking mission will introduce a time-varying vector
to describe the output difference of the ith agent relative to the jth agent. Particularly,
indicates the output difference of the ith agent relative to the centre of the whole agent system. The formation process can be divided into two parts: on the one hand, the leader tracks the reference trajectory
. On the other hand, the followers maintain the formation around the leader. Assumption 2.1 are necessary to solve formation problem.
Assumption 2.1
The reference trajectory input and the output difference vectors
are differentiable.
Definition 2.2
The mixed-order MAS is said to be achieved output consensus if for any initial state values, it follows that:
, if
where is a positive constant. And
describes the upper bound on the steady-state error of the formation.
3. Consensus protocol design
Formation control makes the MAS achieve state consensus under certain conditions, while the mixed-order MAS has different dimensions. The state of the first-order system can describe the position of the agent, and the state of the second-order system describes the position and speed. For first-order agents, considering the zero-input response, we can obtain . To make the agent achieve output consensus is to make the state consensus. In other words, the position of the first-order agents should be consensus. Meanwhile,
,
. Then the sufficient condition can be obtained to achieve the output consensus of mixed-order MAS.
(6)
(6) The position and velocity of the second-order agents must be consensus. The state of the agents are consensus to make the MAS stability.
For each sample instant , define
(7)
(7) Considering the first-order (Equation3
(3)
(3) ) and second-order (Equation4
(4)
(4) ) of MAS, the formation tracking control protocol is designed as (Equation8
(8)
(8) ). Take the two adjacent sampling times as one module in turn, and the control protocol is calculated at the first sampling time of each module. Through the selection of
,
and
are obtained, but
, only
is obtained. In the second sampling time in the module, only calculate the protocol for
to get
, if
, no calculation is required. At this time, the function calculation of a module is completed.
(8)
(8) where
Define
(9)
(9) where
are tunable parameters.
Remark 3.1
In this way, the second-order agent does not need to be calculated at each sampling moment. From the designed protocol and topology, it can be known that when the ith agent needs to redesign the protocol, it only needs to design the intelligence with an index greater than i and does not need to change the whole.
Theorem 3.1
Based on Definition 2.1 and Assumption 2.1, the mixed-order MAS with first-order (Equation3(3)
(3) ) and second-order (Equation4
(4)
(4) ) will reach consensus with the consensus protocol (Equation8
(8)
(8) ).
Proof.
The consensus error of i agent under the protocol is defined as follows:
(10)
(10) From Definition 2.2 known, (Equation11
(11)
(11) ) is a sufficient condition that the time-varying formation tracking problem of the mixed-order MAS is solved.
(11)
(11) The first agent only receives message from the Node 0. If first agent is second order, substitute (Equation5
(5)
(5) ) and (Equation8
(8)
(8) ) into (Equation10
(10)
(10) ).
(12)
(12) Similarly, if the first agent is first order, substitute (Equation3
(3)
(3) ) and (Equation8
(8)
(8) ) into (Equation10
(10)
(10) ).
(13)
(13) Because of
, whether the first multi-agent is first order or second order, it satisfies
(14)
(14) So the first agent can guarantee stability and consensus. For any
, it is assumed that the protocol error of the multi-agent whose index is less than m converges to the domain of the origin at the moment of sampling.
(15)
(15) which means
(16)
(16) The evolution of
of the mth agent at the sampling time can be expressed as
(17)
(17) Note that, and the output difference vectors, the following equations hold:
(18)
(18) because of
, thus
(19)
(19) then
(20)
(20) Iterate (Equation20
(20)
(20) ) and combine (Equation15
(15)
(15) ) and (Equation16
(16)
(16) ),
(21)
(21) in the same way
(22)
(22) (Equation21
(21)
(21) ) and (Equation22
(22)
(22) ) imply that
(23)
(23) In conclusion, considering the mixed-order MAS with dynamic model (Equation3
(3)
(3) ) and (Equation4
(4)
(4) ) under unidirectional topological structure, the protocol error of the first multi-agent system converges to the domain of the origin under the proposed control protocol. For any agent whose index is m, it is assumed that the protocol error of the multi-agent whose index is less than m converges to the domain of the origin, then the protocol error of the mth agent also converges to the domain of the origin. Therefore, based on Assumption 2.1, the MAS will reach consensus with the protocol (Equation8
(8)
(8) ). Proof is completed.
4. Applications
Simulation examples are given in this section to demonstrate the validity of the theoretical results. Consider an MAS consisting of five agents, so agent 3 and agent 4 have first-order dynamics and agent 1, agent 2 and agent 5 possess second-order dynamics. Consider the movement of the agent in a two-dimensional plane as movement along the X-axis and Y-axis. If ,
, otherwise
. The dynamics of the ith agent are expressed as
(24)
(24) The leader tracks the reference trajectory to make a circular motion with a radius of 50 and serves as the virtual centre of the MAS. The trajectory generated is expressed as
(25)
(25) The interactive topology
of all agents is shown in Figure . From Figure the topology
has a spanning tree.
Figure 1. The topology structure of MAS in simulations.
The second and third agents are regarded as a subgroup, which makes an oblique 45 circling movement around the leader, what is more, the second and third agents are symmetrical with respect to the navigator. The fourth and fifth agents also move around the first agent in the same way. The lines of the two subgroups are perpendicular. Therefore, the time-varying vector
is as follows.
For MAS formation control,
are tunable parameters, we take T = 0.01 and
. Take
,
,
, and the rest is zero in this example. The trajectories of MAS in simulation in Figure . The consensus performances under control protocol (Equation8
(8)
(8) ) were depicted in Figures and .
Figure 2. The formation of the MAS in a simulation.
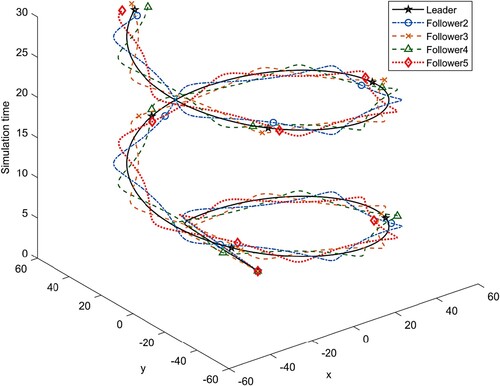
Figure 3. The expected and actual outputs of agents.
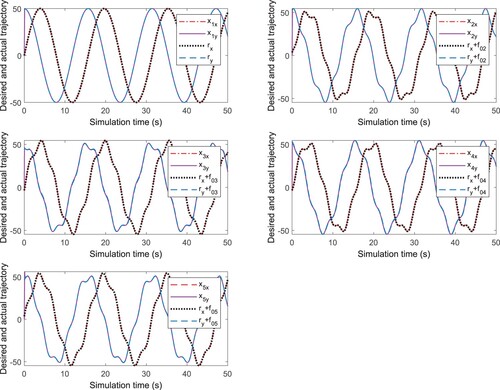
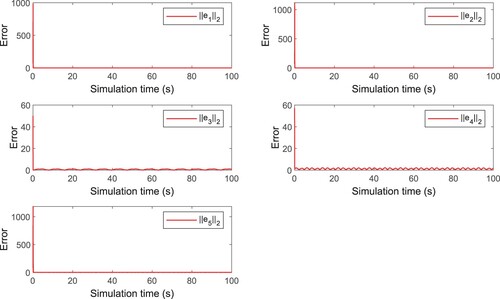
Figure 4. The 2-norm of agents output errors.
is the reference position in the two-dimensional plane.
,
are the actual and formation positions of agent i respectively. From Figure , we can see that the actual position and the expected position almost coincide. From Figure , the 2-norm of the output error of each agent converges to 0, asymptotically, which means that agents 1 to 5 have reached output consensus. It can be concluded that the output consensus problem can be effectively solved by the proposed control protocol. In conclusion, Theorem 3.1 is verified.
5. Conclusion
In this article, the output consensus of a mixed-order MAS consisting of first-order and second-order systems is investigated. A novel modularized distributed protocol without kronecker product is proposed. The stability and formation tracking performance of the system under the proposed protocol are verified by theory and simulation. In the future, we will discuss formation control of heterogeneous multi-agent system with constrained output feedback control.
Disclosure statement
No potential conflict of interest was reported by the author(s).
Additional information
Funding
References
- Duan, G. (2020). High-order fully actuated system approaches: Part I. Models and basic procedure. International Journal of Systems Science, 52(2), 422–435. https://doi.org/10.1080/00207721.2020.1829167
- Keer, Z. (2017). Observer-based formation control of heterogeneous multi-agent systems without velocity measurements. The 32nd Youth Academic Annual Conference of Chinese Association of Automation (YAC). (pp. 669-674). IEEE. https://doi.org/10.1109/YAC.2017.7967494.
- Li, X., Yang, Z., He, S., Huang, P., Liao, G., & Jiang, Y. (2022). Nonhomogeneous clutter suppression based on terrain elevation interferometric phase compensation in multi-satellite formation systems. Digital Signal Processing, 121, 103282. https://doi.org/10.1016/j.dsp.2021.103282
- Liu, X., Xu, B., & Xie, L. (2014). Distributed tracking control of second-order multi-agent systems under measurement noises. Journal of Systems Science and Complexity, 27(5), 853–865. https://doi.org/10.1007/s11424-014-1070-z
- Tan, C., Yin, X., Liu, G. P., Huang, J., & Zhao, Y. B. (2018). Prediction-based approach to output consensus of heterogeneous multi-agent systems with delays. IET Control Theory & Applications, 12(1), 20–28. https://doi.org/10.1049/iet-cta.2017.0844
- Wang, F. Y., Liu, Z. X., & Chen, Z. Q. (2018). A novel leader-following consensus of multi-agent systems with smart leader. International Journal of Control, Automation and Systems, 16(4), 1483–1492. https://doi.org/10.1007/s12555-017-0266-0
- Wen, G., Zhang, Y., Peng, Z., Yu, Y., & Rahmani, A. (2020). Observer-based output consensus of leader-following fractional-order heterogeneous nonlinear multi-agent systems. International Journal of Control, 93(10), 2516–2524. https://doi.org/10.1080/00207179.2019.1566636
- Wu, H., Gao, K., & An, B. (2019). A class of second-order consensus protocol in multi-agent systems with multiple input delays. Journal of Systems Science and Complexity, 32(5), 1280–1289. https://doi.org/10.1007/s11424-018-7441-0
- Xi, L., Jun, Z., Jin, H., Yong, L., & Jun, Q. (2020, July). Output formation tracking control for multiple second-ordered integrator systems: A novel modularized approach. In 2020 39th Chinese Control Conference (CCC) (pp. 4907-4911). IEEE. https://doi.org/10.23919/CCC50068.2020.9188636.
- Zhang, T. Y., You, B., & Liu, G. P. (2020). Motion coordination for a class of multi-agents via networked predictive control. Journal of Systems Science and Complexity, 33(3), 622–639. https://doi.org/10.1007/s11424-020-8122-3
- Zheng, Y., & Wang, L. (2012). Distributed consensus of heterogeneous multi-agent systems with fixed and switching topologies. International Journal of Control, 85(12), 1967–1976. https://doi.org/10.1080/00207179.2012.713986
- Zheng, Z., Guo, J., & Gill, E. (2019). Distributed onboard mission planning for multi-satellite systems. Aerospace Science and Technology, 89, 111–122. https://doi.org/10.1016/j.ast.2019.03.054