
 ?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.
?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.Abstract
In this paper, the problem of the adaptive synchronization control is studied for a class of stochastic complex networks with unknown nonlinear coupling strength and derivative coupling. First, in order to deal with the unknown nonlinear coupling strength, Takagi–Sugeno (T–S) fuzzy method is used to transform the network model into a T–S fuzzy complex network model. Then,a fuzzy adaptive controller and the corresponding adaptive parameter update rate are designed. Subsequently, a new Lyapunov function is constructed, which is related to the derivative coupling. By employing the stochastic analysis technique and Lyapunov stability theory, a sufficient condition is given for exponential stabilization in mean square of the synchronization error system. Finally, the effectiveness of the obtained theoretical results is verified through a simulation.
1. Introduction
Due to the wide application of complex networks, such as Internet, communication network, electrical power grids and so on, the research of complex networks has attracted a lot of attention, including mathematics, biology and other fields. Synchronization is an important phenomenon in various dynamic behaviours of complex networks, i.e. the states of all nodes in the network approach the same trajectory. In the past decades, researchers have proposed different synchronization control methods, such as pinning control (Liu & Chen, Citation2015), sliding mode control (Chen et al., Citation2017), impulsive control (Dai et al., Citation2009), adaptive control (Ding & Li, Citation2016) and so on. Among many synchronization control methods, the adaptive control is an effective control method to achieve synchronization of complex networks due to the fact that the control parameters can be self-adjusted according to the characteristics of the system. To mention a few, the adaptive PI synchronization controller has been designed in Gu et al. (Citation2020) for complex networks with stochastic coupled nonlinear dynamics. The design method of adaptive quantization finite-time synchronization controller has been provided in He et al. (Citation2021) for the complex networks with time-varying delay coupling and adaptive coupling strength. In addition, in Hu et al. (Citation2022) the quasi-synchronization problem has been investigated for uncertain complex networks based on the event triggering strategy, and the adaptive fuzzy controller has been designed to make the complex networks achieve quasi-synchronization.
However, the above adaptive synchronization control methods are suitable for complex networks with non-derivative coupling. In fact, because some networks often contain the past change rate information of state variables (i.e. the interconnected couplings have the form of derivative). Therefore, the complex networks with derivative coupling are often encountered in practical, such as coupled chaotic systems (Xu, Zhou, Fang, Sun & Pan, Citation2010), droop control inverters (Lombana & di Bernardo, Citation2015a) and linear or nonlinear oscillators (Lombana & di Bernardo, Citation2015b). Considering the practical application of the complex networks with derivative coupling, the synchronization problem of delay complex networks with derivative coupling has been studied in Yuan et al. (Citation2018), and a fuzzy adaptive feedback controller has been designed to ensure the asymptotic stability of the synchronization error system. The adaptive synchronization control method has been given in Xu, Zhou, Fang and Sun (Citation2010) for complex networks with derivative coupling by using LaSalle invariance principle. The pinning synchronization control method has been studied in Wang et al. (Citation2020) for the complex networks with multi-order derivative coupling. In Tang et al. (Citation2020), by using the parameter classification and mathematical induction methods, the sufficient condition to ensure the cluster synchronization of derivative coupled neural networks with time-delay and random disturbance has been derived.
On the other hand, most of the previous mentioned research results on the synchronization control of complex networks have mainly focussed on the synchronization control methods when the network dynamics model, coupling strength and the topology are known. In practical, due to the complexity of the network dynamic behaviour and network environment, some unknown situations of network dynamics, the coupling strength or topology are often encountered. In order to deal with this problem, considering the Takagi–Sugeno (T–S) fuzzy model as an effective method to approach nonlinear systems, some research results on the synchronization control of T–S fuzzy complex networks have been presented in recent years. The authors in Wu et al. (Citation2013) used pinning control and adaptive feedback strategy to ensure the synchronization for T–S fuzzy complex networks with time-varying delay and adaptive coupling weight. Two chattering free quantized intermittent controllers have been designed in Zhou et al. (Citation2020) for complex networks with nonlinear coupling strength and stochastic disturbance to solve the finite-time synchronization problem of T–S fuzzy complex networks. We also refer to Li et al. (Citation2019, Citation2021) and Deng et al. (Citation2019, Citation2020) for interesting results related to our study in different contexts.
In the existing research on synchronization control of complex networks, many published results assume that the coupling strength of complex networks is known and has linear properties. The problem of the synchronization control of complex networks with unknown nonlinear coupling strength has not been sufficiently studied. In this paper, we design the adaptive synchronization controller to ensure the mean square exponential stability of the synchronization error system for a class of stochastic complex networks with unknown nonlinear coupling strength and derivative coupling. The main contributions of this paper are presented as follows:
The derivative coupling, unknown nonlinear coupling strength and stochastic disturbance are considered simultaneously in complex networks. On the basis of the model characteristics of the complex networks, the network model is transformed into T–S fuzzy complex network model.
Based on the T–S fuzzy complex network model, the T–S fuzzy adaptive controller and corresponding adaptive parameter update rate are designed to realize the goal of synchronization control for the complex networks.
A new Lyapunov function related to derivative coupling is constructed. The mean square exponential stability of the synchronization error system is proved by using stochastic analysis technique and Lyapunov stability theory.
Notation
In this paper, and
denote the sets of positive integers and positive real numbers, respectively.
is the space of real number,
denotes the n dimensional Euclidean space.
and
are the minimum and maximum values of this set.
represents the transpose of the matrix A. ⊗ is the Kronecker product.
stands for a block-diagonal matrix.
represents the Euclidean norm of the vector,
represents mathematical expectation.
represents the N-dimensional identity column vector.
2. Problem formulation and preliminaries
Consider a stochastic complex network composed of n nodes, and the dynamic model of node i is shown as follows:
(1)
(1) where
represents the state vector of the ith node,
represents the control input of the ith node,
is a continuousnonlinear vector-valued function,
represents the constant matrix,
is the nonlinear coupling strength of the dynamic network, and it is an unknown positive bounded function. Assume that for all
,
, where
, and
,
, are the known constants.
, where
, is an inner-coupling matrix of the system.
is the derivative coupling matrix. If there exists a link from node
to node i, then
, otherwise
, and
.
is an n dimensional vector Weiner process defined on
with
,
. Here, the white noise
is independent of
for
.
is the noise intensity function matrix.
Remark 2.1
Define the Laplacian matrix L = −B. For an undirected graph, the matrix L is symmetric. Since L has zero row sums, 0 is an eigenvalue of L with the associated eigenvector . According to Gershgorin's theorem, for an undirected graph all of the nonzero eigenvalues of L are positive. Therefore, all of the nonzero eigenvalues of B have negative. Then, the matrix B is a symmetric negative semi-definite matrix. And 0 is a simple eigenvalue of L if and only if the undirected graph is connected. Therefore, for the connected undirected graph, the eigenvalues of the matrix B are
.
Since is unknown, based on the fuzzy theory, the complex network (Equation1
(1)
(1) ) can be expressed as the following T–S fuzzy model:
Rule s: IF is
,
is
is
, THEN
where
,
are the fuzzy sets,
is the premise variable vector.
By applying the standard fuzzy inference methods of single-ton fuzzification, product fuzzy and weighted average defuzzification, the T–S fuzzy complex network model can be obtained as follows:
(2)
(2) where
denotes the membership function of the premise variable
corresponding to the fuzzy set
.
indicates the membership of rule s, if
,
, then for all
,
.
represents the normalized membership function satisfying
Letting
be the solution of an isolated node and satisfying the following dynamic equation:
(3)
(3) where the matrix A, the functions
,
and
are defined in the same way as in Equation (Equation1
(1)
(1) ).
The synchronization error vectors can be defined as follows:
From (Equation2
(2)
(2) ) and (Equation3
(3)
(3) ), we can obtain the following dynamic equation of synchronization error system:
(4)
(4) where
,
.
The following fuzzy adaptive controller is designed for the synchronization error system (Equation4(4)
(4) ):
Rule s: IF is
,
is
is
, THEN
(5)
(5) where
is the controller gain matrix,
is the adaptive gain parameter. Based on T–S fuzzy rules, the adaptive fuzzy controller is
(6)
(6) where the adaptive update law of
is designed as follows:
(7)
(7) Based on the synchronization error system (Equation4
(4)
(4) ) and the adaptive fuzzy controller (Equation6
(6)
(6) ), by using the properties of Kronecker product of matrix, we can obtain the closed-loop synchronization error system as follows:
(8)
(8) where
,
,
,
,
,
.
Definition 2.1
If there exist constants M>0 and , for any initial condition the following inequality is satisfied:
Then, the synchronization error system (Equation4
(4)
(4) ) is said to be mean square exponentially stable.
Assumption 2.2
For vector-valued function and vectors
, there exists a constant d such that
Assumption 2.3
Tanaka et al., Citation2003
Assume that the derivative of functions satisfies
Assumption 2.4
There exists a non-negative constant ξ such that the noise intensity function matrix satisfies
Lemma 2.5
Friedman, Citation1976
Consider the following nonlinear stochastic system:
(9)
(9) where
is the state vector,
and
are continuous,
is n-dimensional Weinerprocess. Suppose
are non-negative function, which are twice continuous differentiable in x and once in t, then
along the stochastic differential of the system (Equation9
(9)
(9) ) is
(10)
(10) where the operator
is defined as
where
,
,
. Then for any
, we have
as long as the expectations of the integrals exist.
3. Main results
Theorem 3.1
For a stochastic complex network (Equation1(1)
(1) ) satisfying Assumptions 2.2, 2.3, 2.4, given the scalars
, if there exists a positive definite symmetric matrix P, such that the following linear matrix inequality holds:
(11)
(11) where
,
,
is the given positive number,
, μ is an arbitrary positive constant. Then, the stochastic complex dynamic networks (Equation1
(1)
(1) ) and (Equation3
(3)
(3) ) can be synchronized with the mean square exponential stable by the fuzzy adaptive controller (Equation6
(6)
(6) ) and the adaptive update law (Equation7
(7)
(7) ).
Proof.
The Lyapunov function is chosen as follows:
(12)
(12) where
is a constant. Then, by using Lemma 2.5, the stochastic differential of
along the synchronization error system (Equation8
(8)
(8) ) can be obtained as
(13)
(13) where
(14)
(14) According to the definition of the derivative coupling matrix B and looking back Remark 2.1, we know that the eigenvalues of the matrix B are
, then the matrix
is a positive definite matrix and its minimum eigenvalue
and the maximum eigenvalue
. Subsequently, from Assumption 2.4, we have
(15)
(15) From Assumption 2.2, we get
Therefore, we obtain
(16)
(16) For any scalar
, from (Equation14
(14)
(14) )–(Equation16
(16)
(16) ), and Assumption 2.3, we have
(17)
(17) where
. On the basis of the theorem condition (Equation11
(11)
(11) ), we get
. Taking the expectation for both sides of (Equation17
(17)
(17) ), we get
(18)
(18) For any
, from Equation (Equation18
(18)
(18) ) and Lemma 2.5, we have
(19)
(19) From the definition of
and Equation (Equation19
(19)
(19) ), we have
(20)
(20) From Equation (Equation20
(20)
(20) ), noting that
, we have
(21)
(21) where
.
According to Definition 2.1, the synchronization error system (Equation8(8)
(8) ) is mean square exponentially stable under the fuzzy adaptive controller (Equation6
(6)
(6) )–(Equation7
(7)
(7) ).
4. Illustrative examples
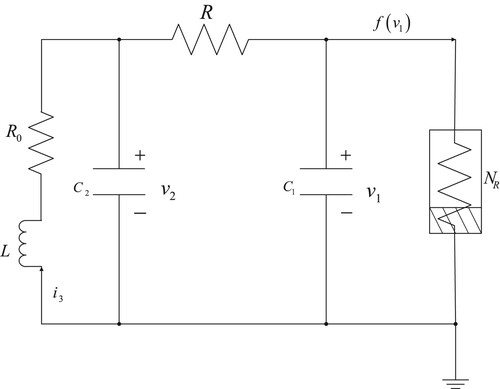
Consider a complex network of Chua's circuit with five nodes. A single Chua's circuit is shown in Figure (Chua et al., Citation1993), which satisfied the following differential equation:
(22)
(22) where
and
represent the voltage at both sides of capacitors
and
,
represents the current through the inductor L.
and R are linear resistance.
represents the current through the nonlinear resistance
, and
. According to Hwang et al. (Citation1997), the feedback controller and the inductor are connected in series to form the voltage
. On the other hand, complex networks may be affected by noise. Therefore, the Chua's circuit network model can be expressed in the following form:
(23)
(23) where
Figure 1. Chua's circuit.
The external coupling matrix of the complex network is
Letting
, we have
Using the T–S fuzzy rule, the system (Equation23
(23)
(23) ) can be described as follows:
Rule 1: IF is
, THEN
Rule 2: IF
is
, THEN
where
is
,
is
,
,
. As a result, the T–S fuzzy model of system (Equation23
(23)
(23) ) is
(24)
(24) where
According to Liu et al. (Citation2019), we choose R = 0.257,
,
, L = 0.0603,
,
,
. The initial states of each node in the networks are
,
,
,
,
, and the initial value of the isolated node is
. It can be shown that there exists a positive constant d = 2, which satisfies Assumption 2.2. The selected noise intensity function matrix
,
is a three-dimensional Weiner process. Let
, such that
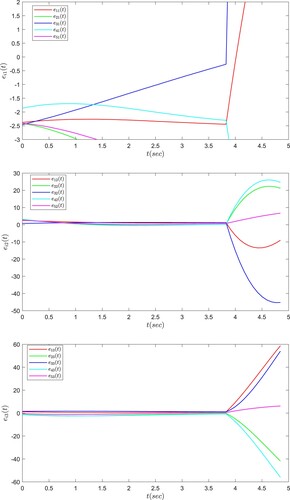
Simulation results are shown in Figures . Figure plots the open-loop response trajectories of synchronization error systems without controllers. From Figure , we can see that states of complex networks are not synchronization with state of isolated node.
Figure 2. The trajectories of open-loop synchronization error systems.
Taking ,
,
,
,
, the linear matrix inequality (Equation11
(11)
(11) ) has the feasible solution
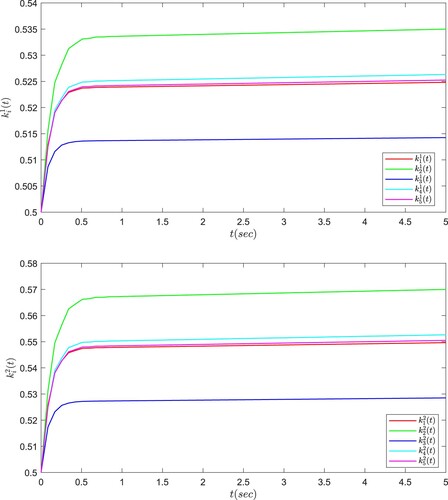
The closed-loop response trajectories of the synchronization error systems are given in Figure . From Figure , it can be seen that the T–S fuzzy adaptive controller designed in this paper is effective and it can guarantee the synchronization performance of the stochastic complex networks. The trajectories of the control input are given in Figure . Figure shows the time response curves of the adaptive controller parameters
. From Figure , it can be seen that the controller adaptively adjusts the parameter
towards a constant when then states of synchronization error systems tend to zero.
Figure 3. The trajectories of closed-loop synchronization error systems.
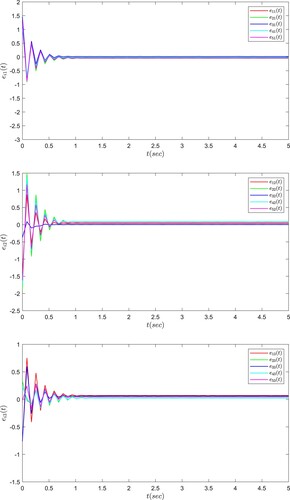
Figure 4. The trajectories of control input.
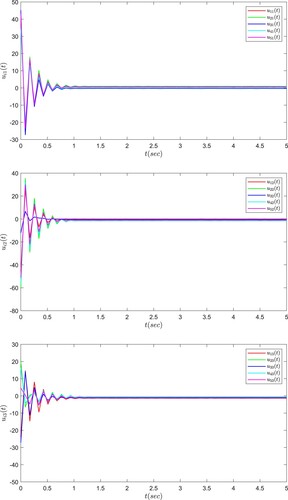
Figure 5. The trajectories of adaptive parameters .
5. Conclusions
In this paper, the adaptive synchronization control problem is studied for stochastic complex networks with unknown nonlinear coupling strength and derivative coupling. First, a set of T–S fuzzy complex network models with constant coupling strength is obtained by using T–S fuzzy method. Then, in order to realize the synchronization of the above T–S fuzzy networks, a suitable T–S fuzzy adaptive controller and the corresponding adaptive parameter update rate are designed. Meanwhile, a new T–S fuzzy Lyapunov function closely related to the derivative coupling matrix and the derivative coupling strength is constructed. Using the Lyapunov stability theory and the Itô differential law, it is proved that the fuzzy adaptive synchronization control method designed in this paper can guarantee the mean square exponential stability of the synchronization error system of the stochastic complex network. Finally, the feasibility and effectiveness of the proposed control method are verified by the simulation of the complex network of Chua's circuit.
Disclosure statement
No potential conflict of interest was reported by the authors.
Data availability statement
Data sharing not applicable to this article as no datasets were generated or analysed during the current study.
Additional information
Funding
References
- Chen, X. Y., Park, J. H., Cao, J. D., & Qiu, J. L. (2017). Sliding mode synchronization of multiple chaotic systems with uncertainties and disturbances. Applied Mathematics and Computation, 308, 161–173. https://doi.org/10.1016/j.amc.2017.03.032
- Chua, L., Itoh, M., Kocarev, L., & Eckert, K. (1993). Chaos synchronization in Chua's circuit. Journal of Circuits, Systems and Computers, 3(1), 93–108. https://doi.org/10.1142/S0218126693000071
- Dai, Y., Cai, Y., & Xu, X. (2009). Synchronisation analysis and impulsive control of complex networks with coupling delays. IET Control Theory and Applications, 3(9), 1167–1174. https://doi.org/10.1049/iet-cta.2008.0294
- Deng, Y. J., Li, J. H., & Liu, H. Y. (2019). On identifying magnetized anomalies using geomagnetic monitoring. Archive for Rational Mechanics and Analysis, 231(1), 153–187. https://doi.org/10.1007/s00205-018-1276-7
- Deng, Y. J., Li, J. H., & Liu, H. Y. (2020). On identifying magnetized anomalies using geomagnetic monitoring within a magnetohydrodynamic model. Archive for Rational Mechanics and Analysis, 235(1), 691–721. https://doi.org/10.1007/s00205-019-01429-x
- Ding, Z. T., & Li, Z. K. (2016). Distributed adaptive consensus control of nonlinear output-feedback systems on directed graphs. Automatica, 72, 46–52. https://doi.org/10.1016/j.automatica.2016.05.014
- Friedman, A. (1976). Stochastic differential equations and applications. Academic Press.
- Gu, H. B., Liu, K. X., & Lu, J. H. (2020). Adaptive PI control for synchronization of complex networks with stochastic coupling and nonlinear dynamics. IEEE Transactions on Circuits and Systems I: Regular Papers, 67(12), 5268–5280. https://doi.org/10.1109/TCSI.8919
- He, J. J., Chen, H., Ge, M. F., Ding, T. F., Wang, L. M., & Liang, C. D. (2021). Adaptive finite-time quantized synchronization of complex dynamical networks with quantized time-varying delayed couplings. Neurocomputing, 431, 90–99. https://doi.org/10.1016/j.neucom.2020.12.038
- Hu, T. T., He, Z., Zhang, X. J., Zhong, S. M., Shi, K. B., & Zhang, Y. Y. (2022). Adaptive fuzzy control for quasi-synchronization of uncertain complex dynamical networks with time-varying topology via event-triggered communication strategy. Information Sciences, 582, 704–724. https://doi.org/10.1016/j.ins.2021.10.036
- Hwang, C., Hsieh, J., & Lin, R. (1997). A linear continuous feedback control of Chua's circuit. Chaos, Solitons, and Fractals, 8(9), 1507–1515. https://doi.org/10.1016/S0960-0779(96)00150-6
- Li, J. Z., Liu, H. Y., & Ma, S. Q. (2019). Determining a random Schrödinger equation with unknown source and potential. SIAM Journal on Mathematical Analysis, 51(4), 3465–3491. https://doi.org/10.1137/18M1225276
- Li, J. Z., Liu, H. Y., & Ma, S. Q. (2021). Determining a random Schrödinger operator: Both potential and source are random. Communications in Mathematical Physics, 381(2), 527–556. https://doi.org/10.1007/s00220-020-03889-9
- Liu, X. W., & Chen, T. P. (2015). Synchronization of nonlinear coupled networks via aperiodically intermittent pinning control. IEEE Transactions on Neural Networks and Learning Systems, 26(1), 113–126. https://doi.org/10.1109/TNNLS.5962385.
- Liu, X. Y., Ho, D. W. C., Song, Q., & Xu, W. Y. (2019). Finite/fixed-time pinning synchronization of complex networks with stochastic disturbances. IEEE Transactions on Cybernetics, 49(6), 2398–2403. https://doi.org/10.1109/TCYB.2018.2821119
- Lombana, D. A. B., & di Bernardo, M. (2015a). Distributed PID control for consensus of homogeneous and heterogeneous networks. IEEE Transactions on Control of Network Systems, 2(2), 154–163. https://doi.org/10.1109/TCNS.2014.2378914
- Lombana, D. A. B., & di Bernardo, M. (2015b). Distributed PID control for consensus and synchronization of multi-agent networks. Ph.D. dissertation, Department of Electric Engineering and Information Technology, University of Naples Federico II, Naples, Italy. http://doi.org/10.6092/UNINA/FEDOA/10510.
- Tanaka, K., Hori, T., & Wang, H. O. (2003). A multiple Lyapunov function approach to stabilization of fuzzy control systems. IEEE Transactions on Fuzzy Systems, 11(4), 582–589. https://doi.org/10.1109/TFUZZ.2003.814861
- Tang, Z., Park, J. H., Wang, Y., & Feng, J. W. (2020). Impulsive synchronization of derivative coupled neural networks with cluster-tree topology. IEEE Transactions on Network Science and Engineering, 7(3), 1788–1798. https://doi.org/10.1109/TNSE.6488902
- Wang, D. Y., Wang, J. L., Ren, S. Y., & Huang, Y. L. (2020). Passivity and synchronization of complex dynamical networks with multiple derivative couplings. International Journal of Control, 93(7), 1710–1724. https://doi.org/10.1080/00207179.2018.1528387
- Wu, X. R., Wang, Y. N., Dong, X. Z., & Huang, L. H. (2013). Adaptive synchronization of T–S fuzzy complex networks with time-varying delays via the pinning control method. Nonlinear Dynamics, 74(1–2), 143–152. https://doi.org/10.1007/s11071-013-0954-0
- Xu, Y. H., Zhou, W. E., Fang, J. A., & Sun, W. (2010). Adaptive synchronization of the complex dynamical network with non-derivative and derivative coupling. Physics Letters A, 374, 1673–1677. https://doi.org/10.1016/j.physleta.2010.02.002
- Xu, Y. H., Zhou, W. E., Fang, J. A., Sun, W., & Pan, L. (2010). Topology identification and adaptive synchronization of uncertain complex networks with non-derivative and derivative coupling. Journal of the Franklin Institute, 347(8), 1566–1576. https://doi.org/10.1016/j.jfranklin.2010.07.007
- Yuan, X. X., Li, J. M., & Li, J. S. (2018). Adaptive synchronization of unknown complex dynamical networks with derivative and distributed time-varying delay couplings. International Journal of Fuzzy Systems, 20(4), 1088–1097. https://doi.org/10.1007/s40815-017-0424-9
- Zhou, Y., Wan, X. X., Huang, C. X., & Yang, X. S. (2020). Finite-time stochastic synchronization of dynamic networks with nonlinear coupling strength via quantized intermittent control. Applied Mathematics and Computation, 376, https://doi.org/10.1016/j.amc.2020.125157.