
 ?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.
?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.ABSTRACT
In this paper, hybrid models of Kalman filter and neural network for state estimation are reviewed of their corresponding academic achievements, the creation of which is a noteworthy development in state estimation. This paper aims to provide a summary of research progress on such hybrid models and emphasize their functions and advantages. First of all, the concept and feature are paid attention to about Kalman filter, and its transmutative modes are taken into consideration. Then several popular neural network algorithms are introduced in brief. Subsequently, research results on hybrid models are analysed and discussed comprehensively. Not only Kalman filter and neural network can be adopted in succession, but also can be mixed in structure. The mixed models can also be divided into two types, the equations or parameters of state–space model are trained by neural network for Kalman filter and the parameters of neural network are updated by Kalman filter. It is proved that the hybrid models outperform than single model of Kalman filter or neural network in accuracy and generalization. Last but not least, the effectiveness of state–space equations of Kalman filter can be established by neural network in nonlinear systems is verified.
1. Introduction
The state, which cannot be obtained directly, could get the most probable value based on the state estimation method in a quantity of systems, see, e.g. Alsaadi et al. (Citation2022); Dong et al. (Citation2018); Hu et al. (Citation2022); Jia et al. (Citation2022); Jiang et al. (Citation2022); Li et al. (Citation2020); Lin et al. (Citation2021); Liu et al. (Citation2022); Suo Li (Citation2022); Wan et al. (Citation2022); Wang et al. (Citation2018); Yang, Ma et al. (Citation2022); Yu et al. (Citation2021); Zhao, He et al. (Citation2022). State estimation, a method for estimating the internal state of a dynamic system based on attainable measurement data, is frequently employed in a great number of automated systems including state-of-charge of battery, positioning, wind speed and robot control (Hannan et al., Citation2018). For example, state-of-charge of battery, which could only get from other measured quantities, is essential to electric vehicle management. With relatively accurate state-of-charge of battery, the management of the battery would be optimized and the life cycle would be extended (Hannan et al., Citation2017; Xiong et al., Citation2017). In addition, without state estimation method, accurately locations of objects cannot be accessible (Tan et al., Citation2020). Precise positioning in unknown indoor environment offers the foundation of smartphone mapping and wireless communication. It is challenging to use equipment to directly quantify the wind speed. State estimation method has promising performance in wind speed prediction (Chen & Yu, Citation2014; Gauterin et al., Citation2016). Accurate wind speed prediction not only can improve their power generation efficiency but also has several beneficial effects on environmental friendliness.
As such, the issue that the state inside the system cannot be measured directly has become a recurring topic, a greater number of researchers devote their time to developing state estimation methods (Wen et al., Citation2022; Zhang et al., Citation2021). In 1809, the least-squares method, which does not require priori knowledge, was proposed by Gauss (Brown & DennisJr, Citation1971). Despite being easy to calculate, the least-squares method is considerably hampered by noise. In the 1940s, Wiener filter, an optimal linear filter, was introduced to extract the signal from the observation with noise (Norbert, Citation1949; Yu et al., Citation2017). Wiener filter is a linear least mean square error estimation, but it needs compute Wiener–Hopf equation which calls for a multitude of calculation and storage space. To solve the problems in Wiener filter, state space was introduced into estimation theory by Hungarian mathematician Rudolf Emil Kalman in 1960 (Rudolph, Citation1960). Based on hidden Markov model and linear algebra, it is not required to store all previous data in Kalman filter. Simultaneously, Kalman filter not only can estimate the state in real time but also can reduce the computing resource and storage space. In linear Gaussian system, the optimal estimation can be obtained with predict step and correct step of Kalman filter. Due to the superiority of Kalman filter, it has a broad range of applications. However, the service conditions of Kalman filter are rather harsh. It can only be used in linear systems with white Gaussian noise. Due to various uncertainties in real systems, the conditions of Kalman filter are unable to satisfy, which reduces the estimation accuracy of the Kalman filter. To improve the nonlinearity of Kalman filter, a great number of researches have been conducted including, but are not limited to, extended Kalman filter (EKF) (Dan, Citation2006), unscented Kalman filter (UKF) (Julier & Uhlmann, Citation1997) and Cubature Kalman filter (CKF) (Ienkaran & Simon, Citation2009).
In recent years, as a result of the advancement of computer technology, neural networks are increasingly adopted for estimation (Ji et al., Citation2021; Li et al., Citation2021; Rajagukguk et al., Citation2020; Wang et al., Citation2020, Citation2022; Xu et al., Citation2021; Yang, Li et al., Citation2022; Yu et al., Citation2022; Zhao, Li et al., Citation2022). Compared with Wiener filter, Kalman filter and other traditional state estimation methods, neural networks can deal with uncertainty factors and be applied in strongly nonlinear systems. The outperformance of neural network in nonlinear systems and the superior real-time of Kalman filter make researchers reconsider increasing the accuracy and efficiency by the hybrid modelling approach (Abbaspour et al., Citation2019; Satish & Rajkumar, Citation2019; Li et al., Citation2023; Lu et al., Citation2017; Shen et al., Citation2019). However, review papers about the hybrid models of neural network and Kalman filter are still insufficient. To fill the blank and report pioneering results of the hybrid models, this paper reviews the introduction of Kalman filter family, the structure and conception of neural network and the hybrid models of Kalman filter and neural network for state estimation. The contributions of this survey are summarized as follows: (1) the concept and implementation process of Kalman filter are introduced at length, which is beneficial to researchers interested in this field; (2) papers about the hybrid models of Kalman filter family and neural network are reviewed comprehensively; and (3) to the best of our knowledge, this is the first exhaustive survey for state estimate hybrid models of Kalman filter family and neural network.
The rest of this paper is organized as follows. Section 2 provides a detailed introduction about Kalman filter, extended Kalman filter, unscented Kalman filter and cubature Kalman filter, which are the foundation of the hybrid models for state estimation in this survey. Section 3 describes four prominent neural networks, including artificial neural network, feedforward neural network, recurrent neural network and back propagation neural network. Section 4 summarizes and analyses the hybrid models of Kalman filter and neural network for state estimation in detail. Finally, conclusion is given in Section 5.
2. Kalman filter family
2.1. Kalman filter
Kalman filter, which was introduced by Rudolf Emil Kalman to solve the linear filtering problem in the field of aircraft and aviation (Rudolph, Citation1960), is one of the most significant and popular estimate methods. Kalman filter is described by state space which consists of statement equation and observation equation. The equations which portray the dynamic characteristics of the system are described as follows:
(1)
(1) where X is the system state, A is the state transition matrix, B is the control matrix,
is the control variable, and
is the process noise or disturbance,
is the measurement vector, H is the observation matrix,
is a random noise vector. The optimal estimation of state is obtained by Kalman filter through the state of last time and current measurement. The covariance of
and
are
and
, respectively. Kalman filter operates by two steps: prediction step and correction step. The calculation process of the two steps are as follows:
(2)
(2)
(3)
(3) where
is the predicted system state vector at time step k, superscript
represents an a-priori estimate,
is an estimated state vector of the system at time step k + 1,
is a predicted state vector of the system at time step k,
is the estimate uncertainty (covariance) matrix of the current state,
is the predicted estimate covariance matrix for the next state,
is the Kalman filter gain at time step k + 1. The covariance matrix can also be described as follows:
(4)
(4)
(5)
(5) Equation (Equation4
(4)
(4) ) shows that the smaller the covariance matrix is, the more accurate the estimate state. In Kalman filter, the Kalman filter gain minimizes the trace of the covariance matrix to obtain the optimal estimation of the state. Covariance matrix reflects the linkage between expected values and observed values and conceals the historical data of the estimated state. In essence, the process of Kalman filter is a first-order Markov chain. Therefore, Kalman filter can update data in real time and only requires a tiny amount of data storage to process. Kalman filter, as an estimation algorithm, takes the result estimated at the previous moment as the current value and update it with measurement. Consequently, the posteriori is obtained through prior information and measured values. However, Kalman filter can only be used in linear system with Gaussian white noise. To fit it up with real nonlinear environment, EKF, UKF and CKF are proposed.
Figure 1. State estimation methods.
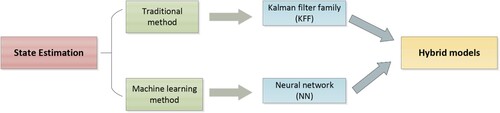
Figure 2. Hybrid models for state estimation.
2.2. Extended Kalman filter
Most of systems in realistic life are nonlinear, which do not meet the condition of Kalman filter. EKF linearizes the nonlinear functions by function fitting (Wang et al., Citation2010). Additionally, it linearizes the state mean and covariance (Dan, Citation2006). The nonlinear system which figures by state space is as follows:
(6)
(6) where
,
are nonlinear functions. EKF adopts Taylor expansion, which is a crucial mathematical method for simplifying complexity, to approximately represents the nonlinear system. EKF adopts Taylor expansion at the mean and always uses the first-order Taylor expansion for approximation. The formula is as follows:
(7)
(7) By linearizing the nonlinear function, the Jacobi matrix of state information yields both the state transition matrix and the observation matrix of the EKF to obtain the covariance matrix. In addition, EKF has the same algorithm structure with Kalman filter. The prediction step and update step of EKF are described as follows:
(8)
(8) where
(and
respectively) is the Jacobian matrix of functions
(and
respectively).
By taking Taylor expansion, EKF can be utilized in nonlinear system. However, EKF is only appropriate for first-order nonlinearity since high-order terms of the Taylor expansion are not taken into account. Besides, Jacobian matrix takes up rich computing resources which limits the application of EKF.
2.3. Unscented Kalman filter
Unlike EKF approximates the nonlinear function into a linear function, UKF employs Unscented Transformation (UT) to approximate the probability density of the state (Julier & Uhlmann, Citation1997). UKF generates sigma point sets to mimic the state transfer relationship of the nonlinear system. The process of generating sigma point set is as follows:
(9)
(9) λ as well as other two parameters (α, κ) are determined by the user but need to satisfy the following relationship:
(10)
(10) The method of selecting points of the sigma point set
is known as UT, which is a particular and deterministic process. The mean and covariance of the sigma point set
are the same as those of state. All of the points in
conform to Gaussian distribution. A new point set which also conforms to Gaussian distribution is obtained after each point in
through the nonlinear function. The prior knowledge of the system is concealed in the mean and covariance of the sigma points. Under the structure of Kalman filter, each point of the sigma point set mapping and deliver on by UT to acquire the state of next time step. Compared with EKF, UKF fits with system with stronger nonlinearity. UKF can achieve accurate prediction in second-order nonlinear system (Dini et al., Citation2011). UKF will be unbalanced and deviate from the optimal estimation in nonlinear system over third order.
2.4. Cubature Kalman filter
To solve high dimensional nonlinear filtering problem, Arasaratnam. Ienkaran developed Cubature Kalman filter, which is based on Cubature transform (Ienkaran & Simon, Citation2009). Both CKF and UKF are generated point sets to approximate the probability density of the state. CKF generates a set of weighted equally cubature points according to third-degree spherical-radial cubature rule (Ienkaran & Simon, Citation2009). The process of generating sigma point set is as follows:
(11)
(11)
where n is the dimension of state vector and m is the number of cubature points. The cubature points set contains 2n cubature points to construct n-dimensional state vector. All of the points of cubature points set only have positive weights and located in a certain region (Ienkaran & Simon, Citation2009). Like UKF, a novel points set will get after each point of cubature points set transform the nonlinear function. UKF dependent on parameters a lot, while no parameters are required in CKF. In addition, by utilizing Cubature transform, CKF is able to tackle third-order nonlinear factors.
3. Common neural network models
Due to the success of AlphaGo, an artificial program invented by Google, neural network has begun to gain plenty of research attention (Bryan & Stefan, Citation2021; Liu & An, Citation2020; Öztürk & Erçelebi, Citation2021; Pedro et al., Citation2021; Shen et al., Citation2020). It is a new trend to make use of neural network model for state estimation. By introducing nonlinear activation function, the nonlinear fitting ability of neural network has been increased. To get more knowledge of neural network, four popular neural network models, including artificial neural network, feed forward neural network, recurrent neural network and back propagation neural network, will be introduced in this section.
3.1. Artificial neural network
Artificial neural network (ANN) is a mathematical model inspired by biological neurology. By mimicking the structure and function of biological neural networks, ANN receives, transmits and processes data. Biological neural network is composed of neurons which consists of cell bodies and synapses. The cell bodies produce excitation or inhibition. Dendrites and axons receive and send information respectively. ANNs emulate biological neural network by establishing artificial neuron and connections between the neurons. In 1943 (Warren S & Walter, Citation1943), MLP neuron model was brought forward by psychologist McCulloch and mathematician Pitts. Since then the research attention of artificial neural network has been arisen. ANN consists of input layer, hidden layer and output layer. Signals and data from environment are accepted by the input layers. While the hidden layer accepted the signals from the input layer and transform them to the output layer. There may be several hidden layers, depending on the problem to be solved. Finally, the output layer accepts signals from the last hidden layer and exports the output data. ANN, which is a parallel decentralized system, has the characteristics of instant learning (Peng et al., Citation2020).
3.2. Feed forward neural network
ANN which contains the most basic concept of neural network: input layer, hidden layer and output layer, is the most fundamental neural network model. There are various types of ANNs, such as modular neural network, recurrent neural network, generative adversarial networks, deep neural network, spiking neural network, feedforward neural network, physical neural network (Chen, Challita et al., Citation2019). FNN is a general neural network model. Units of FNN merely have the input from the previous layer and output from the next layer and data is passed layer by layer. In addition, FNN is the basis of convolutional neural network, radial basis function and many other neural network models.
3.3. Recurrent neural network
Recurrent neural network (RNN) which has the similar architecture with ANN, adds a function to receive historical input. RNN allows the units not only connect with the previous layer but also with the historical layer. In theory, this method of work enable RNN can make use of historical information in arbitrarily long sequences but are the historical information is limited in practice (Mantas & Herbert, Citation2009). RNN can handle the dynamic temporal problems and process the time-related data effectively. But the memory of RNN to record the historical data is limited (Chen, Challita et al., Citation2019).
3.4. Back propagation neural network
Back propagation (BP) neural network algorithm is divided into two processes: signal forward transmission and error backward propagation. The process of signal forward transmission is similar to ANN, while the error backward propagation will adjust the weight and bias of layers according to gradient descent algorithms. According to continuous training, the output of the neural network is as possible as to the expected output (Liu, Dou et al., Citation2019). BP neural network can learn fast and the accuracy of the estimation is excellent. But the convergence speed is slow. While the over-fitting results may occurrence in BP network (Peng et al., Citation2020).
4. The hybrid models of Kalman filter family and neural network
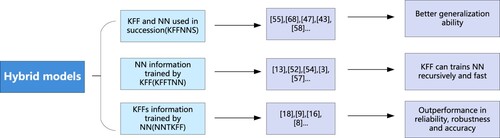
Developing the hybrid models of Kalman filter family (KFF) and neural network (NN) has attracted considerable research interest since the pioneering work in Gintaras and Lee (Citation1994) and a great number of research results have been reported in the literature (Hu et al., Citation2019; Satish & Rajkumar, Citation2019; Li et al., Citation2022; Gintaras & Lee, Citation1994). There are too many papers about hybrid models of Kalman filter family and neural network. Thus the papers we reviewed are divided into three types, including KFF and NN used in succession (KFFNNS), NN information trained by KFF (KFFTNN) and KFF's information trained by NN (NNTKFF).
4.1. KFF and NN used in succession
KFF and NN used in succession model is the simplest of the three hybrid models. By summarizing these papers about KFFNNS, it is found that the hybrid models outperform the single neural network model or Kalman filter family model. This hybrid model has stirred much research attention.
The KFFNNS model is adopted for state estimation such as robot calibration and wind speed forecasting. A combined method for robot calibration has been proposed in Nguyen et al. (Citation2015). This method combined an artificial neural network and EKF. The artificial neural network, which uses a back-propagation algorithm to train the network and delta rule to update the neuron network weights, is to handle the non-geometric error sources, while the EKF is to handle the geometric error sources. EKF can identify the robot geometric parameters, ANN can compensate the non-geometric error effects. Hence, the novel designed method can improve the robot accuracy significantly. Shukur and Lee (Citation2015) have indicated a hybrid KF-ANN model. The structure of the state–space equation is created by an ARIMA model. The output of Kalman filter import into the ANN. Finally, the ANN forecasts the state series. The KF-ANN model successfully solves the stochastic uncertainty problem and handles nonlinear factors. The results indicate that the hybrid model improves the accuracy of wind speed forecasting. An optimized neural network which smoothed by Kalman filter has been illustrated in Li et al. (Citation2018). The neural network adopts back propagation and particle swarm optimization algorithm (PSO-BPNN). Kalman filter smooths the data and the neural network trains the distance model. The Hybrid algorithm can reduce the positioning error and improve the accuracy.
A combined estimation scheme has been investigated by Li et al. (Citation2019), which can predict the battery capacity and SOC in real-time. The scheme used recursive least squares method and AEKF to estimate SOC and improve the accuracy of the model. The Elman neural network is then employed to estimate the battery capacity in real time. The co-estimation method can reduce the estimation error and be used at varied temperatures. A finite difference method has been employed to get the equations governing the response of a cantilever plate (Osama et al., Citation2016). The Kalman filter is introduced to estimate the states of the reduced-order system which cannot be measured directly. The state variables then are imported into a feed forward neural network to predict the future values and response of the cantilever plate. The presented neuro controller can forecast the future response of the cantilever plate and mitigate the accelerations of the flexible cantilever plate. In Hu et al. (Citation2019), extended Kalman filter (MME-EKF) based on the minimum model error algorithm has been employed to solve the parametric uncertainties problems and radial basis function neural network (RBFNN) is introduced to compensate for the uncertainties caused by the vertical motion. The hybrid model enhances the transient tracking performance and shows effectiveness and superiority of the developed control. A fresh data fusion approach which uses a neural network that fuses the outputs of multiple Kalman filters has been pointed out by Sajjad et al. (Citation2014). The results show that this fusion approach acquires a better performance than other data fusion approaches. In-flight detection and identification of aircraft icing and reconfigurable control have been overviewed by Fikret and Chingiz (Citation2013). NN, Kalman filter, hybrid model of NN and Kalman filter and other techniques are compared with each other in this paper. The hybrid model of NN and Kalman filter takes nine parameters from Kalman filter output as NN input for prediction. The hybrid mode has a better performance than other method. The combined model can offer more accurate and timely messages.
Kalman filter is a good choice to estimate states of the suspension. Kalman filter has been employed to estimate the states from the measurement of the suspension deflection and an RBF approximator has been introduced to control (Cseko et al., Citation2015). The NN approximator works with Kalman filter adequately and the cost of the combined controller is lower than controller. A hybrid support vector machine (SVM), ANN and Kalman filter based algorithm have been analysed in Ebha et al. (Citation2017). The harmonic components estimated by Kalman filter serve as feature vectors for SVM and ANN. The SVM performs fault detection and classification, ANN identifies zone and locates. The hybrid model improves the dependability of transmission and the accuracy of the fault. Compared with traditional schemes, the hybrid scheme offers more faster, secure results, which is promising for real-time application. A recursive model has been introduced by Francesco et al. (Citation2014). The Kalman filter outputs the state estimation, the total least squares neuron receives the variables and estimates the linear speed which is fed back to the Kalman filter. Experience shows that the new model can increase the computing efficiency. In Lu et al. (Citation2017), Kalman filter has been used to adjust the health parameters of linear parameter varying model. Adaptive linear parameter varying model with SVM receives the output of Kalman filter to describe turbofan engine dynamic behaviourThe investigated model simplifies the topological structure without reducing accuracy.
UKF has been adopted to filter out the outliers in the neural network estimation (He et al., Citation2014). The method reduces the errors in the neural network and improves accuracy and generalization capability of the neural network. Generalized regression neural network has been brought forward to target tracking by Satish and Rajkumar (Citation2018). To reduce the localization errors, KF and UKF have been adopted after the NN estimate respectively. Three methods (GNN, GNN + KF and GNN + UKF) have been compared, results show that Kalman filter and UKF can improve the tracing accuracy. The GNN+UKF approach outperforms all the other method in the context of the tracking. A combination of neural network and non-singular terminal sliding mode control has been employed to control the estimated system (Ahmed & Paul, Citation2015). An optimal unscented Kalman filter then is applied to estimate the system's state. The hybrid method can smooth the control signal and enhance the performance of the controller.
In Silvestro et al. (Citation2017), ANN has been employed to estimate leaf area index (LAI) and canopy cover (CC) in the Yangling area (Central China). The predictions of LAI are further processed with EnKF. The explained method reduces the relative root-mean-square error with potential applications for precision agriculture. K-NN has been used to pinpoint the finger position and Kalman filter has been presented to smooth the trace (Wang, Liu, Chen et al., Citation2018). The designed method can achieve high accuracy for finger tracing. In Chen et al. (Citation2018), a novel collision probability model has been established. The driver intention is modelled by BP algorithm and Kalman filter is employed to predict the trajectories of vehicles and their real-time movement status according the output of neural network. The model has potential applications for risk recognition with high precision. A combined method in which Kalman filter is employed to adjust the predicted output of the neural network and improve the performance of neural network has been studied by Joko et al. (Citation2016). The validation results shows that the combined method outperforms the original neural network method.
A composite structure of ANN and Kalman filter has been brought forward by Morse et al. (Citation2018). Kalman filter uses the location estimate provided by the ANN. The results suggest that the combined method can improve the reliability and shows better performance than the original ANN. Satish and Rajkumar (Citation2019) have utilized the GRNN and UKF simultaneous scheme to track in indoor environment. The results show that GRNN + UKF based approach is good choice for nonlinear system dynamics tracking. A novel scheme has been pointed out by Li et al. (Citation2016). ANN was trained by the 3D GRFs of mobile force plates and joint angle and KF received the output of ANN to reduce the biases of joint angle estimation. The new method is relatively simple compared with multi-inertial sensors on body segments, but the accuracy of the new method is not acceptable. In Liu, Chen et al. (Citation2019), a low cost and lightweight fruit counting system was introduced. Fruit and tree trunk are detected by CNN across image. Kalman filter receives the output of CNN to estimate. Sang-Hyeon and Han-Lim (Citation2019) developed a CNN and Kalman filter hybrid architecture to trace the multi-target. CNN obtains three-dimensional information from the input image. Kalman filter receives the information from CNN for effective tracking. The new method outperforms state-of-the-art CNN method in numerical case studies.
A conclusion that KFF can adjust the output of NN and improve the reliability may be drawn by reviewing above papers. The output of NN always were employed to be the measurement of KFF which can improve the performance of neural network. Taking the output of KFF as the input of NN can smooth the data, reduce the error and improve the estimation accuracy. Furthermore, the hybrid models have better generalization ability.
4.2. NN information trained by KFF
Traditional neural networks update parameters by random gradient descent method. By reviewing the papers, it is found that a large number of innovative solutions have been portrayed to update parameters of neural networks. Among them, various compound algorithms about KFFTNN have been introduced.
A method of wavelet neural network trained by hybrid Kalman filters has been introduced in Che et al. (Citation2013). In this paper, an NN is trained by EKF to capture the low nonlinear relationship between input and output. Two NN are trained by UKF to capture the high nonlinear relationship and estimate the high-frequency component. By comparing with NN trained by back propagation, the NN trained by hybrid Kalman filters output more accurate and conservative predictions. The use of the UKF to parameter estimation of dynamic neurons has shown effective for robust fault detection (Marcin, Citation2013). A hybrid scheme combining CKF with MLP and RBF which can compensate the position and velocity errors during GPS outages has been employed in Shen et al. (Citation2019). CKF was used to optimize the structure of the MLP by estimating weights adaptively. RBF was added to CKF to build the connection between filter parameters and estimation error. The introduced method has much better generalization ability and higher position accuracy than other method. In Asl et al. (Citation2017), four algorithms including BP, EKF, Genetic (GEN) and Particle Swarm Optimization (PSO) have been adopted to train FNN. The results demonstrate that EKF method outperforms all the other method in the specific experiment. Meanwhile, the EKF method needs more computing resources.
EKF has been employed for neural network parameter optimization of hyper basis function neural network (HBF) by Najdan and Zoran (Citation2013). The composite method achieves lower prediction error with good generalization performance. EKF has been utilized to train and update the MLP neural network weights (Alma, Citation2018). The experiment confirms the effectiveness of the proposed approach. In Nyanteh et al. (Citation2013), EKF has been used to train ANN weights. This method can tolerate noise and enables fast convergence. Results from both computer simulation and actual machine data confirm the superiority of the presented approach. A design for resilient control which updates ANN weights by an online EKF algorithm has been introduced by Abbaspour et al. (Citation2019). The novel scheme enhances the reliability of the LFC system with sufficient accuracy. In Zhou et al. (Citation2018), UKF has been employed to train the parameter of RBF neural network which is introduced to build the solution based on indicator diagram data and production data. Two measures are adopted to increase the accuracy of fault diagnosis: UKF trains the weights, the center and the width of neural network and adaptive noise factor method is employed in the model. The innovative model was applied to the pumping unit system, the adaptive filter model demonstrates the effectiveness and good recognition performance in multiple faults classification.
Feed forward neural network has been combined with EKF to estimate the state of robot pose (Zoran et al., Citation2013). The EKF has been employed to update the weights of feed forward neural network. The new hybrid method can learn a motion model of the mobile robot online. A control system has been designed to reduce roll motion of ships by UKF and RBF hybrid algorithm (Wang et al., Citation2017). UKF is adopted to train and update the weights of RBF neural networks. The results show that the inventive method outperforms back propagation neural network method and Proportional-Derivative control system in terms of reducing roll motion for ship in waves. A composite algorithm (Ó. Armando et al., Citation2013) for automatic detection of high-frequency oscillations (HFO) has been presented. The algorithm can detect HFO fast and accurate via an ANN whose weights are trained and adapted by UKF. In Larbi et al. (Citation2019), a new controller has been presented for oriented control under grid conditions. The controller combined EKF and a recurrent high-order neural network (RHONN) to predict the influences of disturbances and unknown dynamics appearing in the grid. Trained by EKF, RHONN identifier adapts to different grid scenarios and show a good approximation for real state vector. The method improves the robustness and can achieve exact control. A recursive neural network whose weights are updated and trained by a dual unscented Kalman filter has been employed by Paulo et al. (Citation2013). The novel method not only can cope with time-varying and unmodeled dynamics but also can accommodate actuation faults by adjusting weights recursively. A real-time neural network control system has been introduced in Yi et al. (Citation2018). The approach adopts an Elman neural network whose weights are trained and updated by UKF. UKF optimizes the weights of the input-to-hidden layer in the critic network and the action network. Experimental results present stability of the suggested method which needs less required samples than the others.
It is easy to draw a conclusion that the method of training NN by KF has an excellent generation performance. KFF can train NN recursively. Compared with traditional gradient descent method, KFF can trains faster.
4.3. KFF's information trained by NN
There are quantities of uncertainties in KFF such as the noise. NN can handle the uncertainties effectively. Consequently, some researchers pull their efforts into NNTKFF models.
A composite approach which combined unscented Kalman filter with support vector regression (SVR–CUKF) has been introduced in Chen and Yu (Citation2014). The nonlinear state–space model of wind sequence which is adopted by UKF, is established by SVR. Experimental results present SVR–CUKF approach achieves better performance than the other methods in terms of reliability and robustness. SVR–CUKF approach can reduce prediction errors by well accounting for the dynamic and stochastic nature of wind speed. A composite algorithm for lithium-ion battery health management has been introduced by Bai et al. (Citation2014). An ANN neural network is integrated with a dual extended Kalman filter. The ANN is employed to established state-space equations of SOC and SoH which are used in two EKF respectively. The initial ANN is trained by data. With evolving online measurements, the ANN model will be updated adaptively by new observations. The experimental results presented that the developed approach outperforms all the other equivalent-circuit model based approach in regards to accuracy and fast convergence performance and robustness.
Feed forward neural network has been integrated with the extended Kalman filter to estimate SOC accurately (Chen, Xiong et al., Citation2019). The method was tested in different environments varying temperature. The output of the FFNN model is battery voltage which is used to update covariance matrix of EKF. EKF estimates the SOC of the battery. The experimental case study results indicated superior robustness and the real-time of the developed approach compared with original FFNN method and ECM-based method. In Bai et al. (Citation2020), a composite structure of Kalman filter and neural units has been employed to optimize the filtering process. After Kalman filter estimates according to the measurement step and update step, two neural units was employed. One of the neural units receives the prediction value and filter gain, the other receives the prediction value, filter gain, and measurement. Both of the units are designed to output the reference output. Experimental results present the good filtering performance of the composite approach, although the inherent mechanism of the approach is not clear.
Though NNTKFF research not as abundant as the other two hybrid models, papers show the advantages of this kind of hybrid model. NNTKFF models have higher accuracy and outperformance in reliability and robustness.
5. Conclusion
In this paper, Kalman filter family has been introduced in detail. Four popular neural network models have also been portrayed. Most of all, the hybrid models of Kalman filter family and neural network have been reviewed comprehensively. According to the way of combination, the hybrid models have been divided into three types: KFFNNS, KFFTNN and NNTKFF. The results of papers concerning KFFNNS have confirmed that the hybrid models acquire excellent performances in accuracy as well as efficiency. The generalization ability is also enhanced. In addition, KFFTNN models have been proved effective in simulation and application. Last but not least, developing NNTKFF models is an emerging trend for meliorating Kalman filter. The significant advantages of the hybrid models have been clearly indicated. However, the application of hybrid models is still at the early stage. In this regard, more attention is required for further study of utilizing hybrid models in practical problems such as SOC estimating and wind speed predicting.
Disclosure statement
No potential conflict of interest was reported by the author(s).
Additional information
Funding
References
- Abbaspour, A., Sargolzaei, A., Forouzannezhad, P., Yen, K. K., & Sarwat, A. I. (2019). Resilient control design for load frequency control system under false data injection attacks. IEEE Transactions on Industrial Electronics, 67(9), 7951–7962. https://doi.org/10.1109/TIE.41
- Abdeljaber, O., Avci, O., & Inman, D. J. (2016). Active vibration control of flexible cantilever plates using piezoelectric materials and artificial neural networks. Journal of Sound and Vibration, 363(0022-460X), 33–53. https://doi.org/10.1016/j.jsv.2015.10.029.
- Ahmed, R., & Paul, Y. (2015). Hardware/software implementation of fuzzy-neural-network self-learning control methods for brushless DC motor drives. IEEE Transactions on Industry Applications, 52(1), 414–424. https://doi.org/10.1109/TIA.2015.2468191
- Alanis, A. Y. (2018). Electricity prices forecasting using artificial neural networks. IEEE Latin America Transactions, 16(1), 105–111. https://doi.org/10.1109/TLA.2018.8291461
- Alonge, F., Cirrincione, M., D'Ippolito, F., Pucci, M., Sferlazza, A., & Vitale, G. (2014). Descriptor-type kalman filter and TLS EXIN speed estimate for sensorless control of a linear induction motor. IEEE Transactions on Industry Applications, 50(6), 3754–3766. https://doi.org/10.1109/TIA.2014.2316367
- Alsaadi, F. E., Liu, Y., & Alharbi, N. S. (2022). Design of robust H∞ state estimator for delayed polytopic uncertain genetic regulatory networks: Dealing with finite-time boundedness. Neurocomputing, 497(0925-2312), 170–181. https://doi.org/10.1016/j.neucom.2022.05.018.
- Arasaratnam, I., & Haykin, S. (2009). Cubature kalman filters. IEEE Transactions on Automatic Control, 54(6), 1254–1269. https://doi.org/10.1109/TAC.2009.2019800
- Armando, L. Ó., Bernardino, C., Laura, M., Consuelo, V., & Kenia, P. (2013). An algorithm for on-line detection of high frequency oscillations related to epilepsy. Computer Methods and Programs in Biomedicine, 110(3), 354–360. https://doi.org/10.1016/j.cmpb.2013.01.014
- Asl, R. M., Hagh, Y. S., & Palm, R. (2017). Robust control by adaptive Non-singular terminal sliding mode. Engineering Applications of Artificial Intelligence, 59(0952-1976), 205–217. https://doi.org/10.1016/j.engappai.2017.01.005.
- Bai, G., Wang, P., Hu, C., & Pecht, M. (2014). A generic model-free approach for lithium-ion battery health management. Applied Energy, 135(0306-2619), 247–260. https://doi.org/10.1016/j.apenergy.2014.08.059.
- Bai, Y., Wang, X., Jin, X., Zhao, Z., & Zhang, B. (2020). A neuron-based Kalman filter with nonlinear autoregressive mode. Sensors, 20(1), 299. https://doi.org/10.3390/s20010299
- Brown, K. M., & Dennis, J. E. (1971). Derivative free analogues of the Levenberg–Marquardt and gauss algorithms for nonlinear least squares approximation. Numerische Mathematik, 18(4), 289–297. https://doi.org/10.1007/BF01404679
- Caliskan, F., & Hajiyev, C. (2013). A review of in-flight detection and identification of aircraft icing and reconfigurable control. Progress in Aerospace Sciences, 60(0376-0421), 12–34. https://doi.org/10.1016/j.paerosci.2012.11.001.
- Che, G., Peter.B, L., Laurent.D, M., & Zhiyi, C. (2013). Hybrid Kalman filters for very short-term load forecasting and prediction interval estimation. IEEE Transactions on Power Systems, 28(4), 3806–3817. https://doi.org/10.1109/TPWRS.2013.2264488
- Chen, C., Liu, L., Qiu, T., Ren, Z., Hu, J., & Ti, F. (2018). Driver's intention identification and risk evaluation at intersections in the internet of vehicles. IEEE Internet of Things Journal, 5(3), 1575–1587. https://doi.org/10.1109/JIOT.2017.2788848
- Chen, C., Xiong, R., Yang, R., Shen, W., & Sun, F. (2019). State-of-charge estimation of lithium-ion battery using an improved neural network model and extended Kalman filter. Journal of Cleaner Production, 234(0959-6526), 1153–1164. https://doi.org/10.1016/j.jclepro.2019.06.273.
- Chen, K., & Yu, J. (2014). Short-term wind speed prediction using an unscented Kalman filter based state–space support vector regression approach. Applied Energy, 113(0306-2619), 690–705. https://doi.org/10.1016/j.apenergy.2013.08.025.
- Chen, M., Challita, U., Saad, W., Yin, C., & Debbah, M. (2019). Artificial neural networks-based machine learning for wireless networks: A tutorial. IEEE Communications Surveys & Tutorials, 21(4), 3039–3071. https://doi.org/10.1109/COMST.9739
- Cseko, L. H., Kvasnica, M., & Lantos, B. (2015). Explicit MPC-based RBF neural network controller design with discrete-time actual Kalman filter for semiactive suspension. IEEE Transactions on Control Systems Technology, 23(5), 1736–1753. https://doi.org/10.1109/TCST.2014.2382571
- Dan, S. (2006). Optimal state estimation: Kalman
and nonlinear approaches. Wiley-Interscience.
- Dini, D. H., Mandic, D. P., & Julier, S. J. (2011). A widely linear complex unscented Kalman filter. IEEE Signal Processing Letters, 18(11), 623–626. https://doi.org/10.1109/LSP.2011.2166259
- Dong, H., Hou, N., Wang, Z., & Ren, W. (2018). Variance-constrained state estimation for complex networks with randomly varying topologies. IEEE Transactions on Neural Networks and Learning Systems, 29(7), 2757–2768. https://doi.org/10.1109/TNNLS.2017.2700331
- Gauterin, E., Kammerer, P., Kühn, M., & Schulte, H. (2016). Effective wind speed estimation: Comparison between Kalman filter and Takagi–Sugeno observer techniques. ISA Transactions, 62(0019-0578), 60–72. https://doi.org/10.1016/j.isatra.2015.11.016.
- Hannan, M. A., Hoque, Md. M., Hussain, A., Yusof, Y., & Ker, P. J. (2018). State-of-the-art and energy management system of lithium-ion batteries in electric vehicle applications: Issues and recommendations. IEEE access, 6, 19362–19378. https://doi.org/10.1109/Access.6287639
- Hannan, M. A., Lipu, M. S. H., Hussain, A., & Mohamed, A. (2017). A review of lithium-ion battery state of charge estimation and management system in electric vehicle applications: Challenges and recommendations. Renewable and Sustainable Energy Reviews, 78(1364-0321), 834–854. https://doi.org/10.1016/j.rser.2017.05.001.
- He, W., Williard, N., Chen, C., & Pecht, M. (2014). State of charge estimation for li-ion batteries using neural network modeling and unscented Kalman filter-based error cancellation. International Journal of Electrical Power & Energy Systems, 62(0142-0615), 783–791. https://doi.org/10.1016/j.ijepes.2014.04.059.
- Hu, C., Wang, Z., Taghavifar, H., Na, J., Qin, Y., Guo, J., & Wei, C. (2019). MME-EKF-based path-tracking control of autonomous vehicles considering input saturation. IEEE Transactions on Vehicular Technology, 68(6), 5246–5259. https://doi.org/10.1109/TVT.25
- Hu, Z., Shi, P., & Wu, L. (2022). Preserving state and control privacies in networked systems with tokenized polytopic transforms. IEEE Transactions on Circuits and Systems II: Express Briefs, 69(1), 104–108. 10.1109/TCSII.2021.3075471
- Ji, D., Wang, C., Li, J., & Dong, H. (2021). A review: Data driven-based fault diagnosis and RUL prediction of petroleum machinery and equipment. Systems Science & Control Engineering, 9(1), 724–747. https://doi.org/10.1080/21642583.2021.1992684
- Jia, C., Hu, J., Chen, D., Cao, Z., Huang, J., & Tan, H. (2022). Adaptive event-triggered state estimation for a class of stochastic complex networks subject to coding-decoding schemes and missing measurements. Neurocomputing, 494(0925-2312), 297–307. https://doi.org/10.1016/j.neucom.2022.04.096.
- Jiang, B., Dong, H., Shen, Y., & Mu, S. (2022). Encoding-decoding-based recursive filtering for fractional-order systems. IEEE/CAA Journal of Automatica Sinica, 9(6), 1103–1106. https://doi.org/10.1109/JAS.2022.105644
- Jondhale, S. R., & Deshpande, R. S. (2019). GRNN and KF framework based real time target tracking using PSOC BLE and smartphone. Ad Hoc Networks, 84(1570-8705), 19–28. https://doi.org/10.1016/j.adhoc.2018.09.017.
- Julier, S. J., & Uhlmann, J. K. (1997). New extension of the Kalman filter to nonlinear systems. Signal Processing, Sensor Fusion, and Target Recognition VI, 3068, 182–193. https://doi.org/10.1117/12.280797
- Kalman, R. E. (1960). A new approach to linear filtering and prediction problems. Journal of Basic Engineering, 82(1), 35–45. https://doi.org/10.1115/1.3662552
- Kim Geok, T., Zar Aung, K., Sandar Aung, M., Thu Soe, M., Abdaziz, A., Pao Liew, C., Hossain, F., Tso, C. P., & Yong, W. H. (2020). Review of indoor positioning: Radio wave technology. Applied Sciences, 11(1), 279. https://doi.org/10.3390/app11010279
- Koley, E., Shukla, S. K., Ghosh, S., & Mohanta, D. K. (2017). Protection scheme for power transmission lines based on SVM and ANN considering the presence of non-linear loads. IET Generation, Transmission & Distribution, 11(9), 2333–2341. https://doi.org/10.1049/gtd2.v11.9
- Larbi, D., Edgar, S. N., & Mohammed, B. (2019). Real-time neural sliding mode field oriented control for a DFIG-based wind turbine under balanced and unbalanced grid conditions. IET Renewable Power Generation, 13(4), 618–632. https:\\doi-org-443.webvpn.bjmu.edu.cn/10.1016\j.conengprac.2018.10.021
- Li, C., Wang, Z., Song, W., Zhao, S., Wang, J., & Shan, J. (2023). Resilient unscented Kalman filtering fusion with dynamic event-triggered scheme: applications to multiple unmanned aerial vehicles. IEEE Transactions on Control Systems Technology, 31(1), 370–381. https://doi.org/10.1109/TCST.2022.3180942
- Li, G., Geng, E., Ye, Z., Xu, Y., Lin, J., & Pang, Y. (2018). Indoor positioning algorithm based on the improved RSSI distance mode. Sensors, 18(9), 2820. https://doi.org/10.3390/s18092820
- Li, G., Liu, T., Yi, J., Wang, H., Li, J., & Inoue, Y. (2016). The lower limbs kinematics analysis by wearable sensor shoes. IEEE Sensors Journal, 16(8), 2627–2638. https://doi.org/10.1109/JSEN.2016.2515101
- Li, J., Wang, Z., Dong, H., & Ghinea, G. (2021). Outlier-resistant remote state estimation for recurrent neural networks with mixed time delays. IEEE Transactions on Neural Networks and Learning Systems, 32(5), 2266–2273. https://doi.org/10.1109/TNNLS.2020.2991151
- Li, X., Feng, S., Hou, N., Wang, R., Li, H., Gao, M., & Li, S. (2022). Surface microseismic data denoising based on sparse autoencoder and Kalman filter. Systems Science & Control Engineering, 10(1), 616–628. https://doi.org/10.1080/21642583.2022.2087786
- Li, X., Han, F., Hou, N., Dong, H., & Liu, H. (2020). Set-membership filtering for piecewise linear systems with censored measurements under Round-Robin protocol. International Journal of Systems Science, 51(9), 1578–1588. https://doi.org/10.1080/00207721.2020.1768453
- Li, X., Wang, Z., & Zhang, L. (2019). Co-estimation of capacity and state-of-charge for lithium-ion batteries in electric vehicles. Energy, 174(0360-5442), 33–44. https://doi.org/10.1016/j.energy.2019.02.147.
- Lim, B., & Zohren, S. (2021). Time-series forecasting with deep learning: a survey. Philosophical Transactions of the Royal Society A, 379(2194), 20200209. https://doi.org/10.1098/rsta.2020.0209
- Lin, N., Chen, D., & Du, J. (2021). Partial-nodes-based state estimation for linear complex networks with randomly occurring sensor delay and stochastic coupling strength. Systems Science & Control Engineering, 9(1), 219–231. https://doi.org/10.1080/21642583.2021.1895003
- Liu, C., Dou, Y., & Ran, C. (2019). Kalman estimator based on BP algorithm for the system with colored and correlated noises, In 2019 IEEE 3rd Advanced Information Management, Communicates, Electronic and Automation Control Conference (IMCEC) pp. 1184–1188.
- Liu, J.-E., & An, F.-P. (2020). Image classification algorithm based on deep learning-kernel function. Scientific Programming, 2020(3). https://doi.org/10.1155/2020/7607612. 7607612.
- Liu, X., Chen, S. W., Liu, C., Shivakumar, S. S., Das, J., Taylor, C. J., Underwood, J., & Kumar, V. (2019). Monocular camera based fruit counting and mapping with semantic data association. IEEE Robotics and Automation Letters, 4(3), 2296–2303. https://doi.org/10.1109/LSP.2016.
- Liu, Z., Lin, W., Yu, X., Rodríguez-Andina, J. J., & Gao, H. (2022). Approximation-free robust synchronization control for dual-linear-motors-driven systems with uncertainties and disturbances. IEEE Transactions on Industrial Electronics, 69(10), 10500–10509. https://doi.org/10.1109/TIE.2021.3137619
- Lu, F., Qian, J., Huang, J., & Qiu, X. (2017). In-flight adaptive modeling using polynomial LPV approach for turbofan engine dynamic behavior. Aerospace Science and Technology, 64(1270-9638), 223–236. https://doi.org/10.1016/j.ast.2017.02.003.
- Mantas, L., & Herbert, J. (2009). Reservoir computing approaches to recurrent neural network training. Computer Science Review, 3(3), 127–149. https://doi.org/10.1016/j.cosrev.2009.03.005
- Marcin, M. (2013). An unscented Kalman filter in designing dynamic GMDH neural networks for robust fault detection. International Journal of Applied Mathematics and Computer Science, 23(1), 157–169.
- McCulloch, W. S., & Pitts, W. (1943). A logical calculus of the ideas immanent in nervous activity. The Bulletin of Mathematical Biophysics, 5(4), 115–133. https://doi.org/10.1007/BF02478259
- Morse, L., Sharif Khodaei, Z., & Aliabadi, M.H. (2018). Reliability based impact localization in composite panels using Bayesian updating and the Kalman filter. Mechanical Systems and Signal Processing, 99, 107–128. https://doi.org/10.1016/J.YMSSP.2017.05.047
- Najdan, V., & Zoran, M. (2013). A growing and pruning sequential learning algorithm of hyper basis function neural network for function approximation. Neural Networks, 46(0893-6080), 210–226. https://doi.org/10.1016/j.neunet.2013.06.004.
- Nguyen, H.-N., Zhou, J., & Kang, H. J. (2015). A calibration method for enhancing robot accuracy through integration of an extended Kalman filter algorithm and an artificial neural network. Neurocomputing, 151(0925-2312), 996–1005. https://doi.org/10.1016/j.neucom.2014.03.085.
- Norbert, W. (1949). Extrapolation, interpolation, and smoothing of stationary time series: with engineering applications (vol. 113, no. 21). MIT Press.
- Nyanteh, Y. D., Srivastava, S. K., Edrington, C. S., & Cartes, D. A. (2013). Application of artificial intelligence to stator winding fault diagnosis in permanent magnet synchronous machines. Electric Power Systems Research, 103(0378-7796), 201–213. https://doi.org/10.1016/j.epsr.2013.05.018.
- Öztürk, A. E., & Erçelebi, E. (2021). Real UAV-bird image classification using CNN with a synthetic dataset. Applied Sciences, 11(9), 3863.
- Paulo, G., Jorge, H., Alberto, C., Paulo, C., & António, D. (2013). Affine neural network-based predictive control applied to a distributed solar collector field. IEEE Transactions on Control Systems Technology, 22(2), 585–596. https://doi.org/10.1109/TCST.2013.2260545
- Pedro, L., Manuel, C., & José C, R. (2021). An experimental review on deep learning architectures for time series forecasting. International Journal of Neural Systems, 31(03), 2130001. https://doi.org/10.1142/S0129065721300011
- Peng, C., Wang, Y., & Huang, C. (2020). Artificial-Neural-Network-Based consumer behavior prediction: a survey. 2020 IEEE 2nd Eurasia Conference on Biomedical Engineering, Healthcare and Sustainability (ECBIOS)134–136. https://doi.org/10.1109/ECBIOS50299.2020
- Puskorius, G.V., & Feldkamp, L.A. (1994). Neurocontrol of nonlinear dynamical systems with Kalman filter trained recurrent networks. IEEE Transactions on Neural Networks, 5(2), 279–297. https://doi.org/10.1109/TNN.72
- Rajagukguk, R. A., Ramadhan, R. A. A., & Lee, Hyun-Jin (2020). A review on deep learning models for forecasting time series data of solar irradiance and photovoltaic power. Energies, 13(24), 6623. https://doi.org/10.3390/en13246623
- Safari, S., Shabani, F., & Simon, D. (2014). Multirate multisensor data fusion for linear systems using Kalman filters and a neural network. Aerospace Science and Technology, 39(1270-9638), 465–471. https://doi.org/10.1016/j.ast.2014.06.005.
- Sang-Hyeon, K., & Han-Lim, C. (2019). Convolutional neural network for monocular vision-based multi-target tracking. International Journal of Control, Automation and Systems, 17(9), 2284–2296. https://doi.org/10.1007/s12555-018-0134-6
- Satish, J. R., & Rajkumar, D. S. (2018). Kalman filtering framework-based real time target tracking in wireless sensor networks using generalized regression neural networks. IEEE Sensors Journal, 19(1), 224–233. https://doi.org/10.1109/JSEN.2018.2873357
- Shen, C., Zhang, Y., Tang, J., Cao, H., & Liu, J. (2019). Dual-optimization for a MEMS-INS/GPS system during GPS outages based on the cubature Kalman filter and neural networks. Mechanical Systems and Signal Processing, 133, 106222. 0888-3270. https://doi.org/10.1016/j.ymssp.2019.07.003.
- Shen, Z., Zhang, Y., Lu, J., Xu, J., & Xiao, G. (2020). A novel time series forecasting model with deep learning. Neurocomputing, 396(0925-2312), 302–313. https://doi.org/10.1016/j.neucom.2018.12.084.
- Shukur, O. B., & Lee, M. H. (2015). Daily wind speed forecasting through hybrid KF-ANN model based on ARIMA. Renewable Energy, 76(0960-1481), 637–647. https://doi.org/10.1016/j.renene.2014.11.084.
- Silvestro, P., Pignatti, S., Pascucci, S., Yang, H., Li, Z., Yang, G., Huang, W., & Casa, R. (2017). Estimating wheat yield in China at the field and district scale from the assimilation of satellite data into the aquacrop and simple algorithm for yield (SAFY) models. Remote Sensing, 9(5), 509. https://doi.org/10.3390/rs9050509
- Siswantoro, J., Prabuwono, A. S., Abdullah, A., & Idrus, B. (2016). A linear model based on Kalman filter for improving neural network classification performance. Expert Systems with Applications, 49(0957-4174), 112–122. https://doi.org/10.1016/j.eswa.2015.12.012.
- Suo, J., & Li, N. (2022). Observer-based synchronisation control for discrete-time delayed switched complex networks with coding-decoding approach. International Journal of Systems Science, 53(13), 2711–2728. https://doi.org/10.1080/00207721.2022.2083257
- Wan, X., Wei, F., Zhang, C.-K., & Wu, M. (2022). Hybrid variables-dependent event-triggered model predictive control subject to polytopic uncertainties. International Journal of Systems Science, 53(14), 3042–3055. https://doi.org/10.1080/00207721.2022.2068694
- Wang, C., Han, F., Zhang, Y., & Lu, J. (2020). An SAE-based resampling SVM ensemble learning paradigm for pipeline leakage detection. Neurocomputing, 403(925-2312), 237–246. https://doi.org/10.1016/j.neucom.2020.04.105
- Wang, C., Liu, J., Chen, Y., Liu, H., Xie, L., Wang, W., He, B., & Lu, S. (2018). Multi-touch in the air: Device-free finger tracking and gesture recognition via COTS RFID, IEEE INFOCOM 2018-IEEE Conference on Computer Communications, pp. 1691–1699.
- Wang, J., Li, X., Zhang, H., & Ma, H. (2010). Survey of nonlinear filters in the framework of recursive Bayesian estimation. Computer Science, 37(8), 21–25.
- Wang, J. Y., Zeng, B. L. M., & Meng, Q. H. (2018). A wind estimation method with an unmanned rotorcraft for environmental monitoring tasks. Sensors, 18(12), 4504. https://doi.org/10.3390/s18124504
- Wang, L., Liu, S., Zhang, Y., Ding, D., & Yi, X. (2022). Non-fragile l2-l∞ state estimation for time-delayed artificial neural networks: an adaptive event-triggered approach. International Journal of Systems Science, 53(10), 2247–2259. https://doi.org/10.1080/00207721.2022.2049919
- Wang, Y., Chai, S., Khan, F., & Nguye, H. D. (2017). Unscented Kalman filter trained neural networks based rudder roll stabilization system for ship in waves. Applied Ocean Research, 68(0141-1187), 26–38. https://doi.org/10.1016/j.apor.2017.08.007.
- Wang, Yafei, Liu, Yahui, Fujimoto, Hiroshi, & Hori, Yoichi. (2018). Vision-Based Lateral State Estimation for Integrated Control of Automated Vehicles Considering Multirate and Unevenly Delayed Measurements. IEEE/ASME Transactions on Mechatronics, 23(6), 2619–2627. http://dx.doi.org/10.1109/TMECH.2018.2870639
- Wen, P., Dong, H., Huo, F., Li, J., & Lu, X. (2022). Observer-based PID control for actuator-saturated systems under binary encoding scheme. Neurocomputing, 499(0925-2312), 54–62. https://doi.org/10.1016/j.neucom.2022.05.035.
- Xiong, R., Cao, J., Yu, Q., He, H., & Sun, F. (2017). Critical review on the battery state of charge estimation methods for electric vehicles. IEEE Access, 6, 1832–1843. https://doi.org/10.1109/ACCESS.2017.2780258
- Xu, B., Hu, J., Jia, C., Cao, Z., & Huang, J. (2021). State estimation via prediction-based scheme for linear time-varying uncertain networks with communication transmission delays and stochastic coupling. Systems Science & Control Engineering, 9(1), 173–187. https://doi.org/10.1080/21642583.2021.1888820
- Yang, F., Li, J., Dong, H., & Shen, Y. (2022). Proportional-integral-type estimator design for delayed recurrent neural networks under encoding–decoding mechanism. International Journal of Systems Science, 53(13), 2729–2741. https://doi.org/10.1080/00207721.2022.2063968
- Yang, J., Ma, L., Chen, Y., & Yi, X. (2022). l2–l∞ state estimation for continuous stochastic delayed neural networks via memory event-triggering strategy. International Journal of Systems Science, 53(13), 2742–2757. https://doi.org/10.1080/00207721.2022.2055192
- Yi, J., Chen, S., Zhong, X., Zhou, W., & He, H. (2018). Event-triggered globalized dual heuristic programming and its application to networked control systems. IEEE Transactions on Industrial Informatics, 15(3), 1383–1392. https://doi.org/10.1109/TII.2018.2850001
- Yu, L., Liu, Y., Cui, Y., Alotaibi, N. D., & Alsaadi, F. E. (2021). Intermittent dynamic event-triggered state estimation for delayed complex networks based on partial nodes. Neurocomputing, 459(0925-2312), 59–69. https://doi.org/10.1016/j.neucom.2021.06.017
- Yu, N., Yang, R., & Huang, M. (2022). Deep common spatial pattern based motor imagery classification with improved objective function. International Journal of Network Dynamics and Intelligence, 1(1), 73–84. https://doi.org/10.53941/ijndi0101007
- Yu, S., Emigh, M., Santana, E., & Príncipe, J. (2017). Autoencoders trained with relevant information: Blending Shannon and Wiener's perspectives, 2017 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), pp. 6115–6119.
- Zhang, J., Song, J., Li, J., Han, F., & Zhang, H. (2021). Observer-based non-fragile H∞-consensus control for multi-agent systems under deception attacks. International Journal of Systems Science, 52(6), 1223–1236. https://doi.org/10.1080/00207721.2021.1884917
- Zhao, G., Li, Y., & Xu, Q. (2022). From emotion AI to cognitive AI. International Journal of Network Dynamics and Intelligence, 1(1), 65–72. https://doi.org/10.53941/ijndi0101006
- Zhao, Y., He, X., Ma, L., & Liu, H. (2022). Unbiasedness-constrained least squares state estimation for time-varying systems with missing measurements under round-robin protocol. International Journal of Systems Science, 53(9), 1925–1941. https://doi.org/10.1080/00207721.2022.2031338
- Zhou, W., Li, X., Yi, J., & He, H. (2018). A novel UKF-RBF method based on adaptive noise factor for fault diagnosis in pumping unit. IEEE Transactions on Industrial Informatics, 15(3), 1415–1424. https://doi.org/10.1109/TII.2018.2839062
- Zoran, M., Najdan, V., Marko, M., & Bojan, B. (2013). New hybrid vision-based control approach for automated guided vehicles. The International Journal of Advanced Manufacturing Technology, 66(1-4), 231–249. https://doi.org/10.1007/s00170-012-4321-y