
 ?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.
?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.Abstract
This paper investigates the multiple-bipartite consensus problem without considering neighbours' velocity information in networked Lagrangian systems (NLSs). A distributed adaptive control algorithm without using neighbours' velocity information is proposed, which facilitates the practical configuration deployments in the coopetition networks. By borrowing a subtle vector composed of the eigenvector components associated with zero eigenvalue of Laplacian matrix, a novel reference estimated vector is introduced to conduct the stability analysis step-by-step in the coopetition networks. Finally, simulations are provided to show the effectiveness of the proposed algorithm.
1. Introduction
In the last few decades, the mechanical system coordination control has received considerable attention for the extensive applications in the fields of rescue missions, scheduling of automated highway systems, handling of large objects, sensor networks (Cao et al., Citation2011; Cheah et al., Citation2009; Dimarogonas & Kyriakopoulos, Citation2007; Naserian et al., Citation2020; Ou et al., Citation2017; Ren, Citation2007; Zhu et al., Citation2013). Usually, coordination control is modelled as a consensus or synchronization problem. Many efforts have been devoted to studying a variety of the distributed control of coordinated behaviours for NLSs, such as rendezvous (Dong & Chen, Citation2019), distributed formation (Bechlioulis et al., Citation2018) and flocking (Ghapania et al., Citation2016). In Liu et al. (Citation2015), three distributed adaptive group consensus schemes for NLSs were presented with parametric uncertainties. Recently, a novel distributed adaptive backstepping strategy was given in the finite-time containment control of NLSs with uncertain parameters in Zhao et al. (Citation2022).
Notably, all the work mentioned above is about the consensus problem of NLSs in cooperation networks. However, coopetition networks, in which the widespread antagonistic interactions between agents are involved, should be considered. For example, social network is a classic coopetition network (Xia et al., Citation2016). Altafini (Citation2013) first proposed the concept of bipartite consensus with first-order dynamics in the Altafini-type coopetition network, in which the agent states evolve a symmetric behaviour eventually. Since then, lots of work has been devoted to the studies of this topic. Valcher and Misra (Citation2014) discussed bipartite consensus in high-order multi-agent dynamical systems with antagonistic interactions. Based on the sliding mode control theory, Wu et al. (Citation2020) addressed bipartite tracking problem of networked robotic systems with external disturbances in the task space, exerting on two antagonistic subgroups to reach two arbitrarily small neighbourhoods of the leader state with opposite signs in a finite time. We refer the reader for more details (Hu & Wu, Citation2017; Hu et al., Citation2018; Hu & Zheng, Citation2014).
Nevertheless, the application scenario of bipartite consensus remains limited. There are a broad range of potential engineering backgrounds more than single bipartite consensus problem framework, such as in the applications of surveillance, monitoring for environmental protection, multi-mission rescue and disease diagnosis and treatment (Abrate et al., Citation2013; Chien et al., Citation2017; Durdu & Korkmaz, Citation2019; Xie et al., Citation2019). Thus it is natural and necessary to solve the consensus problem of multiple symmetrical characteristic, which facilitates the deployment of adaptations and applications for NLSs. Based on this, Zhang et al. (Citation2021) proposed the concept of multiple-bipartite consensus in NLSs, integrating two emergent collective behaviours in cooperative-competitive networks.
It should be noted that the controllers designed in the aforementioned literature all utilize relative velocity information. Inspired by the above-mentioned literature, this paper investigates the multiple-bipartite consensus problem of NLSs without using relative velocity information. The contributions of this study are listed as follows. (1) Considering that the relative velocity information is difficult to measure directly in the actual situations, a multiple-bipartite consensus algorithm without using relative velocity information for NLSs is proposed in coopetition networks. (2) By utilizing the decomposition property of the Laplacian matrix in structurally balanced acyclic graph, a novel reference vector, composed of eigenvector components associated with zero eigenvalue of Laplacian matrix, is introduced to carry out stability analysis in each group by step.
The rest of this paper is organized as follows: the basic notations, problem formulation and the main results of multiple-bipartite consensus problem in our framework are introduced in Section 2, respectively. The validity of the main results is verified by numerical simulations in Section 3. Finally, Section 4 summarizes the contributions of this paper and outlines the future work.
2. Presentation of main results
2.1. Notations
,
and
are the set of real numbers, the set of p-dimensional Euclidean space and the set of
real matrices, respectively.
and
are the column vectors with all elements 1 and 0, respectively.
denotes the
identity matrix. Sgn(·) and ⊗ denote respectively the sign function and the Kronecker product.
2.2. Problem formulation
The network communication topology of multi-agent is represented by a directed graph. Let be a weighted directed graph,
is the agent set,
is the edge set and
is the weighted adjacency matrix associated with
, which is given by
if
, otherwise,
if
. A directed path from
to
in the graph is defined as the serial different edges of
, such that
The directed graph is strongly connected, i.e. for any two nodes i and j in
,
, there exists least a directed path from i to j. Furthermore, the graph
is said to be structurally balanced, if
can be divided into two subsets
, of which the intersection is empty, and the union is
. In addition,
if i and j are in the same subset
, m = 1, 2, and
if i and j are from different subsets.
It is said that the agent set has a partition
, such that
can be denoted as
where
. For convenience, we denote
. If
, the index set
represents
. The subnetwork graph
of
associates with
. In addition, two assumptions are listed as follows.
Assumption 2.1
Each is structurally balanced.
Assumption 2.2
Each is strongly connected.
By Assumption 2.1, can be partitioned into two subsets,
and
, such that
,
. Define
, if
,
, and otherwise if
,
, and
,
. The Laplacian matrix of
is defined as
,
, and
.
Considering NLSs consisting of d robots, for the ith robot, the dynamics equation can be written as the following Euler–Lagrange formulation:
(1)
(1) where
are generalized coordinate and velocity vectors, respectively,
is the symmetric positive inertial matrix,
is the Coriolis and centrifugal force matrix,
is the generalized potential force,
is the input torque vector. Moreover, in the following discussion, three basic dynamics properties of system (Equation1
(1)
(1) ) are listed as follows:
Proposition 2.3
There exist positive constants , satisfying
.
Proposition 2.4
is skew symmetric, i.e. for
,
.
Proposition 2.5
System (Equation1(1)
(1) ) is linearly parameterizable with respect to a constant dynamic parameter vector
, that is
(2)
(2) where
are differentiable vectors and
is the regression matrix.
Definition 2.6
Under the partition , system (Equation1
(1)
(1) ) is said to realize multiple-bipartite consensus if
,
, as
, for
or
.
,
, as
, for
,
or
,
, where
,
.
Assume that the Laplacian matrix L has the form below
(3)
(3) where
and
describe the situation of information transmission in
, and from
to
,
, respectively. In addition, we assume that the following assumption holds:
Assumption 2.7
The sum of each row in is zero,
.
Remark 2.1
The inequalities of Property 2.4 are commonly used in Lagrangian-type dynamics coordination problems, which ensures that of Property 2.5 is bounded in the following stability analysis (Kelly et al., Citation2005). Additionally,
and
in Equation (Equation2
(2)
(2) ) are not unique, whose formulations are determined by the dynamics Equation (Equation1
(1)
(1) ).
Remark 2.2
Equation (Equation3(3)
(3) ) shows that
is an acyclic partition of
. If the L does not have the form of Equation (Equation3
(3)
(3) ), we can always rearrange the order of the agents to make the new Laplacian matrix have the normal form in Mei et al. (Citation2012).
2.3. Main results
In this section, considering a consensus-based algorithm without using relative velocity information for NLSs, the main results of multiple-bipartite consensus problem of NLSs are presented in coopetition networks.
First, for the ith robot, define the following auxiliary variable as
(4)
(4) where
.
A sliding vector (
) is introduced by
(5)
(5) Next, the torque control protocol is given by
(6)
(6) where
is the positive definite matrix, which is beneficial to construct the Lyapunov-like function in Equation (Equation11
(11)
(11) ).
is the estimation of
. Here, we do not utilize the relative velocity information. Accordingly, the adaptive law of
is designed as
(7)
(7) where
is a symmetric positive definite matrix.
Apply control protocol (Equation6(6)
(6) ) and adaptive law (Equation7
(7)
(7) ) to system (Equation1
(1)
(1) ), yielding that
(8)
(8) where
.
Assume that and
are defined the same as in Section 2.2. Under Assumptions 2.1, 2.2 and 2.7, the Laplacian matrix L has a zero eigenvalue with the algebraic multiplicity and geometric multiplicity being both k. Then the k linear independent left eigenvectors of the zero eigenvalue can be expressed as
,
, ··· ,
satisfying
(9)
(9)
Lemma 2.8
Mei et al., Citation2016
Suppose that is a directed graph of order
in cooperative networks and is strongly connected,
. Define the matrix
as
, where
is the Laplacian matrix associated with
,
, and
. Then
is the symmetric Laplacian matrix associated with an undirected graph. Assume that ϵ be any positive vector, let
, then the following formula holds:
Next, the major result of this paper is readily given below:
Theorem 2.9
Assume that
is an acyclic partition of
and that 2.1, 2.2 and 2.7 hold. Under (Equation6
(6)
(6) ) and (Equation7
(7)
(7) ), select appropriate control gains, system (Equation1
(1)
(1) ) can realize multiple bipartite consensus in the sense of Definition 2.6.
Proof.
First consider the situation of the subgraph . By Assumption 2.2, as can be seen from Equation (Equation3
(3)
(3) ),
corresponding to
is strongly connected. Combining Equation (Equation9
(9)
(9) ) and Lemma 2.8 shows that there exist a serial real numbers
,
, such that
. Denote
, and
. Define the reference vector
,
,
. Let
be the column stack vector of
,
, i.e.
, where
is the column stack vector of state variables for all the agents in kth group,
. Let
,
,
be the column stack vector of
,
,
, respectively,
.
Rewrite sliding vectors (Equation5(5)
(5) ) as the compact form
(10)
(10) Building Lyapunov-like function
(11)
(11) Combining Equation (Equation11
(11)
(11) ) with Equation (Equation10
(10)
(10) ), the derivative of
with respect to t is given by
where K is the control gain diagonal matrix of all agents.
Denoting , by Equation (Equation10
(10)
(10) ), note that
(12)
(12) and
(13)
(13) Applying Equations (Equation12
(12)
(12) ) and (Equation13
(13)
(13) ) to
, one derives
(14)
(14) where
.
Thanks to Lemma 2.8, one has
(15)
(15) Indeed, since the matrix
is diagonally dominant, it is symmetric positive semidefinite, yielding that
(16)
(16) Denote
. From Equations (Equation15
(15)
(15) ) and (Equation16
(16)
(16) ), it gives rise to
If η is selected as
where
is a positive constant. All of above give the fact that
(17)
(17) From Equation (Equation17
(17)
(17) ),
. And by Equation (Equation12
(12)
(12) ),
,
. Therefore, according to Barbalat's Lemma, one has
. Hence,
if
Second consider the consistency of group two. By Assumption 2.2, the subgraph corresponding to
is strongly connected. Combining Equation (Equation9
(9)
(9) ) and Lemma 2.8 shows that there exist another serial real numbers
, ,
, such that
. Denote
and
. Define the reference vector
,
,
. Let
,
,
be the column stack vector of
,
,
, respectively,
.
Rewrite sliding vectors (Equation3(3)
(3) ) as the compact form
(18)
(18) Building Lyapunov-like function
The derivative of
with respect to t is given by
Denoting
, from the expression of
, one has
(19)
(19) and
(20)
(20) Combining Equations (Equation19
(19)
(19) ) and (Equation20
(20)
(20) ), one has
where
,
From Lemma 2.8, one has
(21)
(21) The matrix
is diagonally dominant and symmetric positive semidefinite, yielding that
(22)
(22) By Equations (Equation21
(21)
(21) ) and (Equation22
(22)
(22) ), one obtains
If η is selected as
, where
is a positive constant.
All of above give the fact that
(23)
(23) From Equation (Equation23
(23)
(23) ),
. And by Equation (Equation19
(19)
(19) ),
. Integrate both sides of Equation (Equation23
(23)
(23) ), yielding that
. Therefore, according to Barbalat's Lemma, one has
. Therefore,
if
Analogously, repeating above processes derives that as
,
, i.e. multiple bipartite consensus for NLSs can be achieved. Thus the designed algorithm can well realize our control objective.
Remark 2.3
In the process of analysis, we can see that, under the condition of the given geometrical assumptions in Theorem 2.9, due to the influence of the former subgroup on the latter subgroup, it will take a longer time for the latter subgroup to reach agreement with the acyclic partition structure.
Remark 2.4
The Lagrangian dynamics owns strong coupled inherent nonlinearity properties. To the authors' best knowledge, our work makes the first attempt to solve the problem of multiple-bipartite consensus without relative velocities in the context of this classical type. In the view of a more engineering standpoint, the interesting encoding–decoding approach deserves focus (Wang et al., Citation2019, Citation2022), which gives a hand for the possible discrete control of NLSs.
3. Simulations
This section will verify the effectiveness of the proposed protocol via simulation. Consider the system composed of seven two-link revolute joint manipulators. The dynamics of all manipulators are illustrated by the same Lagrange equation. For the specific form and parameters, please refer to Liu et al. (Citation2015).
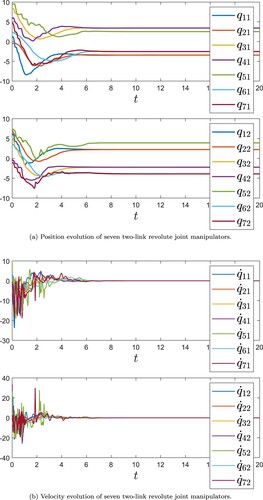
The initial rotation angle of each agent is selected randomly. Control parameters are selected as follows: and
. The topological relationship is shown in Figure . It can be seen that, under the control of designed algorithm, the angles converge to symmetric values of two groups as shown in Figure (a). The rotational angular velocity revolution is shown as in Figure (b). Above-mentioned parameters in simulations are the ones which act on the real Lagrange dynamics equation (Equation1
(1)
(1) ) and adequate to solve multiple-bipartite consensus problem. Therefore, the simulation results live up to the requirement of multiple-bipartite consensus.
Figure 1. The network communication topology for seven two-link revolute joint manipulators.
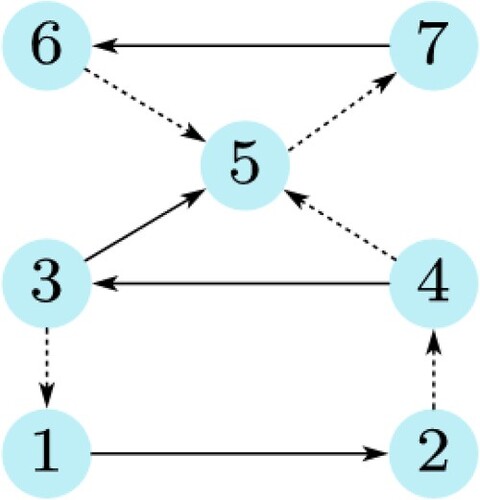
Figure 2. Demonstration of simulation results of multiple-bipartite consensus: (a) position evolution and (b) velocity evolution.
4. Conclusion
In this paper, we addressed the multiple-bipartite consensus problem of NLSs without using neighbours velocity information. A novel reference vector was introduced to facilitate stability analysis and simulations were provided to show the effectiveness of the proposed algorithm. Under our theory, anticipative results are achieved and the collective behaviours of NLSs can be highly stable and reliable. In the future, the multiple bipartite containment control problem of NLSs will be discussed. It is also very challenging to consider more practical engineering thought, such as with the help of RRP communication (Luo et al., Citation2023, Citation2016).
Disclosure statement
No potential conflict of interest was reported by the author(s).
Additional information
Funding
References
- Abrate, F., Bona, B., Indri, M., Rosa, S., & Tibaldi, F. (2013). Multirobot localization in highly symmetrical environments. Journal of Intelligent & Robotic Systems, 71(3–4), 403–421. https://doi.org/10.1007/s10846-012-9790-6
- Altafini, C. (2013). Consensus problems on networks with antagonistic interactions. IEEE Transactions on Automatic Control, 58(4), 935–946. https://doi.org/10.1109/TAC.2012.2224251
- Bechlioulis, C. P., Demetriou, M. A., & Kyriakopoulos, K. J. (2018). A distributed control and parameter estimation protocol with prescribed performance for homogeneous lagrangian multiagent systems. Autonomous Robots, 42(8), 1525–1541. https://doi.org/10.1007/s10514-018-9700-2
- Cao, Y., Stuart, D., Ren, W., & Meng, Z. (2011). Distributed containment control for multiple autonomous vehicles with double-integrator dynamics: algorithms and experiments. IEEE Transactions on Control Systems Technology, 19(4), 929–938. https://doi.org/10.1109/TCST.2010.2053542
- Cheah, C. C., Hou, S. P., & Slotine, J. J. E. (2009). Region-based shape control for a swarm of robots. Automatica, 45(10), 2406–2411. https://doi.org/10.1016/j.automatica.2009.06.026
- Chien, C.-H., Wang, W.-Y., & Hsu, C.-C. (2017). Multi-objective evolutionary approach to prevent premature convergence in Monte Carlo localization. Applied Soft Computing, 50, 260–279. https://doi.org/10.1016/j.asoc.2016.11.020
- Dimarogonas, D. V., & Kyriakopoulos, K. J. (2007). On the rendezvous problem for multiple nonholonomic agents. IEEE Transactions on Automatic Control, 52(5), 916–922. https://doi.org/10.1109/TAC.2007.895897
- Dong, Y., & Chen, J. (2019). Adaptive control for rendezvous problem of networked uncertain Euler-Lagrange systems. IEEE Transactions on Cybernetics, 49(6), 2190–2199. https://doi.org/10.1109/TCYB.2018.2821700
- Durdu, A., & Korkmaz, M. (2019). A novel map-merging technique for occupancy grid-based maps using multiple robots: a semantic approach. Turkish Journal of Electrical Engineering and Computer Sciences, 27(5), 3980–3993. https://doi.org/10.3906/elk-1807-335
- Ghapania, S., Mei, J., Ren, W., & Song, Y. (2016). Fully distributed flocking with a moving leader for Lagrange networks with parametric uncertainties. Automatica, 67, 67–76. https://doi.org/10.1016/j.automatica.2016.01.004
- Hu, J., & Wu, Y. (2017). Interventional bipartite consensus on coopetition networks with unknown dynamics. Journal of the Franklin Institute, 354(11), 4438–4456. https://doi.org/10.1016/j.jfranklin.2017.04.010
- Hu, J., Wu, Y., Liu, L., & Feng, G. (2018). Adaptive bipartite consensus control of high-order multiagent systems on coopetition networks. International Journal of Robust Nonlinear Control, 28(7), 2868–2886. https://doi.org/10.1002/rnc.v28.7
- Hu, J., & Zheng, W. (2014). Emergent collective behaviors on coopetition networks. Physics Letters A, 378(26–27), 1787–1796. https://doi.org/10.1016/j.physleta.2014.04.070
- Kelly, R., Santiba´n~ez, V., & Lori´a, A. (2005). Control of robot manipulators in joint space. Springer-Verlag London.
- Liu, J., Ji, J., Zhou, J., Xiang, L., & Zhao, L. (2015). Adaptive group consensus in uncertain networked Euler-Lagrange systems under directed topology. Nonlinear Dynamics, 82(3), 1145–1157. https://doi.org/10.1007/s11071-015-2222-y
- Luo, Y., Wang, Z., Sheng, W., & Yue, D. (2023). State estimation for discrete time-delayed impulsive neural networks under communication constraints: A delay-range-dependent approach. IEEE Transactions on Neural Networks and Learning Systems, 34(3), 1489–1501. https://doi.org/10.1109/TNNLS.2021.3105449
- Luo, Y., Wang, Z., Wei, G., Alsaadi, F. E., & Hayat, T. (2016). State estimation for a class of artificial neural networks with stochastically corrupted measurements under Round-Robin protocol. Neural Networks, 77, 70–79. https://doi.org/10.1016/j.neunet.2016.01.001
- Mei, J., Ren, W., & Chen, J. (2016). Distributed consensus of second order multi-agent systems with heterogeneous unknown inertias and control gains under a directed graph. IEEE Transactions on Automatic Control, 61(8), 2019–2034. https://doi.org/10.1109/TAC.2015.2480336
- Mei, J., Ren, W., & Ma, G. (2012). Distributed containment control for Lagrangian networks with parametric uncertainties under a directed graph. Automatica, 48(4), 653–659. https://doi.org/10.1016/j.automatica.2012.01.020
- Naserian, M., Ramazani, A., Khaki-Sedigh, A., & Moarefianpour, A. (2020). Fast terminal sliding mode control for a nonlinear multi-agent robot system with disturbance. Systems Science
Control Engineering, 8(1), 328–338. https://doi.org/10.1080/21642583.2020.1764408
- Ou, M., Sun, H., Gu, S., & Zhang, Y. (2017). Distributed finite-time trajectory tracking control for multiple nonholonomic mobile robots with uncertainties and external disturbances. International Journal of Systems Science, 48(15), 3233–3245. https://doi.org/10.1080/00207721.2017.1381891
- Ren, W. (2007). Consensus strategies for cooperative control of vehicle formations. IET Control Theory and Applications, 1(2), 505–512. https://doi.org/10.1049/iet-cta:20050401
- Valcher, M. E., & Misra, P. (2014). On the consensus and bipartite consensus in high-order multi-agent dynamical systems with antagonistic interactions. System Control Letters, 66, 94–103. https://doi.org/10.1016/j.sysconle.2014.01.006
- Wang, L., Wang, Z., Wei, G., & Alsaadi, F. E. (2019). Observer-based consensus control for discrete-time multiagent systems with coding-decoding communication protocol. IEEE Transactions on Cybernetics, 49(12), 4335–4345. https://doi.org/10.1109/TCYB.6221036
- Wang, L., Wang, Z., Zhao, D., & Wei, G. (2022). Event-based state estimation under constrained bit rate: An encoding-decoding approach. Automatica, 143, Article 110421. https://doi.org/10.1016/j.automatica.2022.110421
- Wu, Y. D., Ge, M. F., Ding, T. F., Chen, C. Y., & Ling, G. (2020). Task-space bipartite tracking of networked robotic systems via hierarchical finite-time control. Nonlinear Dynamics, 100(4), 3469–3483. https://doi.org/10.1007/s11071-020-05675-7
- Xia, W., Cao, M., & Johansson, K. H. (2016). Structural balance and opinion separation in trust-mistrust social networks. IEEE Transactions on Control of Network Systems, 3(1), 46–56. https://doi.org/10.1109/TCNS.2015.2437528
- Xie, J., Pun, C.-M., Pan, Z., Gao, H., & Wang, B. (2019). Automatic medical image registration based on an integrated method combining feature and area information. Neural Processing Letters, 49( 1), 263–284. https://doi.org/10.1007/s11063-018-9808-6
- Zhang, T., Li, H., Liu, J., Lu, D., Xie, S., & Luo, J. (2021). Distributed multiple-bipartite consensus in networked Lagrangian systems with cooperative-competitive interactions. Nonlinear Dynamics, 106(3), 2229–2244. https://doi.org/10.1007/s11071-021-06674-y
- Zhao, L., Yu, J., & Wang, Q. G. (2022). Adaptive finite-time containment control of uncertain multiple manipulator systems. IEEE Transactions on Cybernetics, 52(1), 556–567. https://doi.org/10.1109/TCYB.2020.2981090
- Zhu, J., Lu, J., & Yu, X. (2013). Flocking of multi-agent non-holonomic systems with proximity graphs. IEEE Transactions on Circuits and Systems I: Regular Papers, 60(1), 199–210. https://doi.org/10.1109/TCSI.2012.2215715