
 ?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.
?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.Abstract
This paper addresses the tracking control problem of a single-arm manipulator actuated by Pneumatic Artificial Muscle (PAM) subjected to perturbation in parameters. The super-twisting sliding-mode control (STSMC) has been designed for the PAM system and the stability analysis has been presented to prove the asymptotic convergence of tracking errors. A perturbation observer-based on sliding-mode methodology has been proposed to estimate the uncertainty in system parameters and it is combined with STSMC to establish a robust controller against variation in parameters and to improve the capability of SMC in terms of chattering reduction. The stability analysis based on Lyapunov showed that the estimation error could converge asymptotically and the closed-loop system of an observer-based controlled PAM manipulator is asymptotically stable. Also, to improve the performance of the observer-based controlled system, a modern optimization technique based on Particle Swarming Optimization (PSO) has been suggested and developed for tuning the design parameters of the super-twisting sliding mode-controlled PAM robot based on Sliding-Mode Perturbation Observer (SMPO). The computer simulation based on MATLAB programming format showed the effectiveness of the both proposed observer and controller.
PUBLIC INTEREST STATEMENT
During the last decade, there has been a significant increase in the industrial and scientific utilization of PAMs due to their high strength and small weight. Until now PAMs have been applied mostly in the area of bio-robotic applications. As these actuators resemble the characteristics of actual skeletal muscles, researchers have tried to emulate the soft compliant structure of organic muscle, bone, tendons, and skin by PAMs. This led to the development of biologically inspired robots that mimic the morphology and physiology of humans and animals. Due to their high-power outputs, with relatively light weights and has inherent compliance, which meets the need for safety, simplicity, and lightness that human-robot interaction requires. This feature makes it a promising actuator choice for therapeutic devices, which are designed for rehabilitation therapy of patients suffering from degenerative muscle diseases, extremity impairment, or neurological injuries that affect their kinetic abilities. These human-related applications could motivate control researchers in developing advanced control strategies with PAMs.
1. Introduction
The pneumatic actuators such as cylinders, pneumatic stepper motors, bellows, and pneumatic engines are commonly used to date. Pneumatic Artificial Muscles (PAMs) is one type of pneumatic actuators, which are made mainly of an inflatable and flexible membrane that works like inverse bellows; i.e. they contract on inflation. The force generated by PAM actuators does not depend only on pressure, but also on the state of inflation, which adds another source of spring-like behavior. These PAMs, which mimics the animal muscle, are characterized by lightweight since the membrane forms the core element of these actuators. However, they can transfer the same amount of power as cylinders do, where both actuators have the same volume and pressure ranges (Repperger et al., Citation1998; Rynolds et al., Citation2003).
The PAMs are used in many applications due to their lightweight, simple construction, and high force/weight ratio, direct connection, easy replacement, and safe operation. The PAM actuators found their application in biomechanics, bio-robotics, robotics, artificial limb replacement. Also since PAMs are noise-free devices, they apply in-hospital treatments to patients who are sensitive to the noise of sounds. Compared to motor actuators, the PAMs do not need a gear mechanism to increase power due to their high power/volume ratios. Due to their elasticity, the PAMs are useful for the natural frequency of biped locomotion. Additionally, PAMs are useful for under-water applications due to their water immunity (Repperger et al., Citation1998; Rynolds et al., Citation2003). Since the operation of PAM mimicking that of real muscle, PAM is effectively used to implement the humanoid. Many disadvantages have been reported with PAM-actuated systems. Due to the antagonistic structure of PAMs, one needs a pair of PAMs to actuate a load in one degree of freedom (DOF), while only one actuator is needed to move the load for the same DOF in the case of motor-actuated systems (Repperger et al., Citation1998; Rynolds et al., Citation2003).
The PAM-based systems are characterized by high complexity and nonlinearity and involve uncertain parameters. Many researchers have presented different control strategies to address the control problems of uncertain mechanical systems actuated by pneumatic muscles. The following researches address the recent control strategies to PAM-actuated systems:
Tsagarakis and Caldwell developed a new model of operation for PAM systems. The new model has been experimentally applied on a very large actuator and it shows how this new model can improve the assessment of forces and displacement that can be achieved by the actuator. The new model is compared to previous system models. They concluded that the force/displacement profile of pneumatic muscle type actuators, permitting better planning of designs, and assessment of performance requirements (Tsagarakis & Darwin, Citation2000).
Caldwell et al. designed a dexterous manipulator powered by 18 pneumatic muscle actuators (PAM). The PID controller with the feed-forward term has been used to control the pneumatic system. The closed-loop performance showed reasonably robust characteristics to small pressure variations. However, a highly noticeable noise and vibration have been reported on the system response which considerably degraded the closed-loop performance (D.G. Caldwell et al., Citation2002).
Ammar Al–Jodah and Laith Khamesn designed first and second-order sliding-mode control schemes for tracking control of single link robotic arm actuated by pair of PAMs. A performance comparison has been made between the proposed controllers in terms of robustness against uncertainty in parameters and the capability to suppress the chattering in the actuated signal. The computer simulation showed that the second-order sliding-mode controller has better tracking error accuracy and better chattering suppression capability than the first-order counterpart (Al-Jodah & Khames, Citation2018).
Tae-Yong Choi et al. proposed a new control method to overcome the space problem due to the implementation of the actual PAM robot controlled by a proportional pressure regulator. The proposed controller is synthesized based on a set of small encoders and pressure switches to be replaced by the commercial proportional pressure regulator, whose size is not suitable to be applied on the stand-alone robot. The proposed control method has been tested on an actual PAM robot supported by five ball joints. The results based on experimental tests showed that the new controller could save space, but at the price of precision degradation (Choi et al., Citation2006).
John H. Lilly and Liang Yang applied the sliding-mode techniques for angle tracking of planar PAM-actuated manipulator, which is arranged in an agonist/antagonist set-up, under load exertion. The sliding-mode controller is developed for a planar elbow manipulator such as to guarantee accuracy in the presence of modeling errors. Also, the requirements of pressure requirements are established for a stable arm without the presence of the control signal. The work presented the stability analysis and addressed the problem of the PAM heating effect (Lilly & Yang, Citation2005).
Tarapong K. and Radom P. have designed an adaptive output tracking controller for a one-link PAM-actuated robot arm. The adaptive controller has developed under unknown physical system parameters represented by the length of the arm, muscle coefficients, a moment of inertia, mass, etc. The work proved that the actual joint angle trajectory of an adaptive controlled system can track the desired trajectory within a prescribed tracking error in a finite time. The effectiveness of the adaptive output controller has been verified via computer simulations, which showed the robustness of the proposed adaptive controller under hard changes in robot parameters (Tarapong & Radom, Citation2008).
William Scaff et al. proposed an optimal conventional PID controller for position control of DOF system actuated by McKibben PAM. The terms of the PID controller are tuned using the Simulated Optimization Algorithm (SOA) such as to obtain better dynamic performance of the PID-controlled system (Scaff et al., Citation2018).
John H. Lilly presented adaptive tracking techniques to enforce the joint angle of PAM-actuated limbs to track a specified reference trajectory. Two configurations have been studied; one is based on tricep PAM and the other on bicep PAM. Stability analysis has been presented and the work conducted a comparison study between the proposed adaptive and PID controller. The results based on simulation showed the superiority of the proposed controller to the conventional one (Lilly, Citation2003).
S. Boudoua et al. proposed a novel neural network-based twisting sliding-mode controller for control of PAM-actuated robot arm and chattering reduction in the control signal. The work used two-layer NN together with online adaptive learning law to approximate the unmodeled and unknown robot dynamics. The neuro-twisting algorithm is developed using Lyapunov stability analysis. Based on the real-time implementation, the experimental results showed that the controller has good control performance when applied to the actual PAM manipulator (Boudoua et al., Citation2015).
Darwin G. Caldwell et al. developed a new high power/weight and power/volume braided pneumatic muscle actuator (PMA). Control of these muscles is explored via adaptive pole-placement controllers. The adaptive scheme is based on an explicit on-line estimation of a parametric model for the overall system. The estimated model is used to determine a basic controller using a pole-placement method. This basic controller is then suitably enhanced to improve stability margins and performance of the closed-loop system. Experimental results for a powered robotic elbow driven by five parallel-connected pneumatic muscles are presented (Caldwell et al., Citation1995).
Mohannad F. and Norsinnira Z. has developed an adaptive backstepping control algorithm for position control of Anthropomorphic Robot Hand in the presence of hysteresis behavior at PAM actuators. The adaptive laws have been derived for uncertainty estimation and the proposed adaptive controller has been combined with the PID controller. The computer simulation has verified good tracking performance based on a hybrid control scheme (Farag & Azlan, Citation2015).
Dang X. and Kyoung Kwan presented a control approach based on a robust time-delay nonlinear technique for position tracking control of system actuated by the pneumatic artificial muscle (PAM). A time-delay estimator has been applied to estimate the system dynamics. Based on sliding-mode methodology, linear and nonlinear compensators are proposed to guarantee asymptotic control performance based on the Lyapunov theorem (Ba & Ahn, Citation2018).
Amjad et al. proposed an adaptive synergetic control for position control of a one-link robot subjected to uncertainties in the actuating muscles. The adaptive laws are developed based on Lyapunov stability analysis to guarantee the asymptotic stability of a controlled robotic system. The proposed controller has been verified and validated based on simulated results, which showed better performance can be obtained with the proposed controller as compared to other version of the adaptive scheme (Humaidi, Ibraheem et al., Citation2020).
Yunduan C. et al. proposed a new Reinforcement learning (RL) algorithm, Local Update Dynamic Policy Programming (LUDPP), to learn and control PAM-actuated robots without the need for model knowledge with the presence of high nonlinearities in mechanical structure and air pressure dynamics. The experimental results, applied to one finger control of Shadow Dexterous Hand, showed that the LUDPP could considerably reduce the computational cost in both space and time as compared to conventional value function-based RL algorithms (Cui et al., Citation2017).
The Variable Structure Control (VSC) with Sliding-Mode Control (SMC) was developed by Emelyanov and his team assistance in the early 1950s. The SMC methodology is an effective tool that aims to design a controller for nonlinear, complex, high order, and time-varying systems in the presence of certain or uncertain parameter variations and external disturbances. The main advantage of the SMC that it is low sensitive for system parameter variations and disturbances which restricted the necessity of exact modeling. The SMC replaces the dynamics of a system by the application of a discontinuous control signal that forces the system to slide along a stable manifold known as a sliding surface (Hameed et al., Citation2019; Utkin, Citation2008; Utkin et al., Citation2017).
The SMC introduces control law which can be distributed into two main parts (equivalent part and switching part). The equivalent part deals with the dynamic of the system and sliding surface such as to conduct the trajectory of the states toward the sliding surface. The switching part of the control signal is responsible for driving the state trajectory to the equilibrium point by maintaining the dynamics of the system onto the sliding surface. In the control action of the SMC, there are undesired phenomena known as chattering, which is caused by the high-frequency oscillation of the sliding variable around the sliding surface, and it is one problem in using sliding-mode technique (Liu, Citation2017; Utkin, Citation1992).
With the rapid developments of effective mathematical tools, SMC could solve many challenging problems in both theory and application. Due to the inevitable uncertainties in most real systems such as modeling error, parameter perturbations, external disturbances, and noises, many versions of SMC strategies have been developed in the literature to cope with these problems (Anh et al., Citation2018; Mobayen, Citation2018; Wu et al., Citation2015; Xi et al., Citation2017).
The Super-Twisting sliding-mode control (STSMC) is a new type of sliding-mode control (SMC), which is characterized by the following features (Feng & Fei, Citation2018; Haghighi & Mobayen, Citation2018; Humaidi & Hasan, Citation2019):
The effect of chattering with STSMC is less than that in the case of SMC.
The STSMC can make the states of the system reach the equilibrium point infinite time, that is, it can zero both sliding variable and its derivative infinite time.
The STSMC requires only the sliding variable (output variable) and there is no need for its derivative and hence it does not require the knowledge of state derivatives as most SMC schemes do. This results in a simple control law and less computation effort.
The STSMC avoids the singularity and achieves exact convergence.
In some applications, where their systems are subjected to uncertainties, the combination of SMC strategy with the observer is intended to acquire the powerful benefits of both methodologies; namely, the robustness characteristics of SMC together with the ability of the observer to estimate and compensate these uncertainties (Huang et al., Citation2019; Kürkçü et al., Citation2018; Li et al., Citation2017; Maqsood & Qu, Citation2020; Mobayen & Javadi, Citation2015; Mobayen & Tchier, Citation2017; Shtessel et al., Citation2014).
The main problem with systems actuated by Pneumatic Artificial Muscles is that they suffer from external disturbances, uncertainties (e.g. unknown parameters, and unmodeled uncertainties, etc), high nonlinearities, hysteresis, and time-varying characteristics, which dramatically degrade the performance of tracking control. To handle this important issue, a STSMC based on perturbation observer has been proposed to deal effectively with the influence produced by parametric uncertainties in actuating muscles. The magic role of the observer is to estimate the uncertainty and to help in compensation for its effect. Therefore, the combined characteristics of perturbation estimation and STSMC will result in a high-performance control algorithm, which will have a robust characteristic against perturbations and also have the capability to reduce the chattering effect in the control signal of PAM-actuated manipulator.
It has been shown that the design parameters of STSMC and sliding-mode observer-based STMC (SMO-STSMC), have a direct impact on their performances. These design parameters are often selected based on the try-and-error procedure. This old technique could not find the optimal dynamic performance of the controlled system based on the proposed controllers. Therefore, a modern optimization technique is used to tune these design parameters to improve the dynamic performance of the controlled system (Humaidi & Hameed, Citation2019). In the present work, the Particle Swarm Optimization (PSO) has been suggested to adjust the design parameters of the controlled system. This modern optimization technique was firstly proposed by Kennedy in 1995 and it was inspired by the behavior of organisms (Kennedy & Eberhart, Citation1995). This optimization tuner is characterized by fast convergence, the efficiency of computation and it can find local and global solutions (Poli et al., Citation2007). Other modern and generalized optimization techniques can be employed either to improve the optimization process or to make a comparison in performance among each other (Allawi et al., Citation2019; Gao & Zhao, Citation2019; Mirjalili, Citation2016; Moezi et al., Citation2018; Nasiri & Khiyabani, Citation2018).
The main contribution of this paper is to design and develop an uncertainty rejection controller based on STSMC and perturbation observer for PAM-actuated robot arm with the presence of uncertainties in muscle parameters. The improvement in the performance of proposed Observer-based STSMC by applying the PSO technique in the tuning of its design parameters is the second contribution, which can be added since it has never been addressed in the literature for such PAM systems. The present work proposed two nonlinear controllers, represented by SMC and SMPO-STSMC, to control and guarantee the stability of the PAM-actuated manipulator. Thus, the contribution of the present work can be embodied by pursuing the following steps of objectives:
Design of Sliding-Mode Perturbation Observer (SMPO) for the PAM-actuated Manipulator system under parameter variations.
Development of the control law for observer-based super-twisting sliding mode-controlled PAM manipulator under parameter variations.
Proof of asymptotic stability for the controlled system based on SMPO using the Lyapunov theorem.
Improvement of the dynamic performance of an observer-based controlled robotic system by optimal tuning of the design parameters using the PSO technique.
Conducting a comparison study of the proposed controllers in terms of robustness characteristics.
2. The dynamic model of PAM
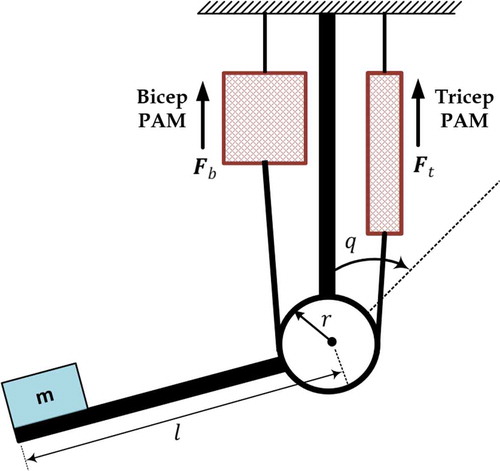
Before proceeding in the control design of the PAM system, it is important to first develop the mathematical model for the system which mimicking the actual behavior of the real system. Then, the system can be analyzed and its associated controller can be designed to meet the required performance. The single link robotic arm is shown in (Al-Jodah & Khames, Citation2018; Lilly & Yang, Citation2005). The equation of motion of the single link robotic arm is given by (Lilly, Citation2003)
where ,
is the arm rotation angle and angular acceleration, respectively,
is the mass at the end of the arm,
is the arm length, is the arm moment of inertia,
is the gravitational acceleration, and
is the torque required to rotate the arm. The torque is generated by the bicep and tricep PAMs and is given by the equation.
where and
are the developed forces from the tricep and bicep PAMs, respectively, r is the pulley radius. The generated
and
can be described by the following dynamic PAM model (Al-Jodah & Khames, Citation2018; Lilly, Citation2003; Lilly & Yang, Citation2005).
Figure 1. The single link robotic PAM arm
where ,
is the tricep and bicep PAM spring coefficients, respectively. These coefficients are a nonlinear function of PAM position.
is the tricep and bicep PAM damper coefficients, respectively. These coefficients are a nonlinear function of PAM velocity.
,
are the amount of PAM contraction for tricep and bicep, respectively,
and
are the velocity of PAM contraction for tricep and bicep, respectively,
are the pressure of tricep and bicep PAMs, respectively. The
and
are given by
where ,
,
,
,
, and
are constants. These constants take two states, one when the PAM is inflated and the other one when it is deflated. The bicep and tricep PAM state is given by
The pressure of tricep and tricep PAM is given by
where ,
are the initial pressure of the tricep and bicep, respectively, ΔP is the pressure difference between the tricep and bicep. ΔP is the control input to the system. The amount of muscle contraction
,
is given by
where the angle is considered as the zero position at which both
and
is zero. By substituting EquationEquations (3)
(3)
(3) and (Equation4
(4)
(4) ) in EquationEquation (2)
(2)
(2) to have
Using EquationEquations (1(1)
(1) ), (Equation5
(5)
(5) ) and (Equation6
(6)
(6) ), then EquationEquation (11)
(11)
(11) becomes
EquationEquation (12)(12)
(12) can be rewritten as
where and
for i = 1, 2, … , 8 are given by
Taking into account the uncertainty, the system can be represented as follows.
where and
are represented by
where , i = 1,2, … , 8 represent the nominal values, while
, i = 1,2, … , 8 are the uncertainty in parameters, which represent the percentage of the nominal values.
3. Sliding-Mode Perturbation Observer (SMPO)
In this paper, the sliding-mode perturbation observer (SMPO) will be used for estimating the uncertainty in model parameters based on equivalent control methodology (AL-Samarraie & Mishary, Citation2018; Haskara et al., Citation2002; Shtessel et al., Citation2014; Spurgeon, Citation2008). After estimating the control law will use this estimation to cancel its effect as will be shown later. The following procedure uses the SMPO to reconstruct the unknown uncertainty in system parameters for the Pneumatic Artificial Muscle dynamic system of EquationEquation (14)
(14)
(14) .
In the first step, the structure of observer dynamics is proposed by;
where and
. It is assumed that the uncertainty in model parameters is the only unknown term. Defining the sliding variable s as;
The time derivative of the sliding variable is given by
From EquationEquations (15)(15)
(15) , (Equation14
(14)
(14) ), (Equation17
(17)
(17) ) becomes
or
The quantity is required to be estimated, while the sliding variable
is used in forming the observer structure. Let us examine the stability of
based on the following candidate Lyapunov function;
Taking the time derivative of to obtain.
where is defined as
. To guarantee the negative definiteness of
, the gain
has to satisfy the following condition;
This leads to ,
which means that the inequality in EquationEquation (21)
(21)
(21) ensures the global attractiveness of the discontinuity manifold
. However, the dynamical system of EquationEquation (19)
(19)
(19) cannot be described on a sliding manifold
due to the presence of the discontinuous term. The present work will pursue the procedure proposed by Utkin to describe the dynamic equation along the manifold
as follows:
Step 1: Assuming that ,
, the task is to find a continuous control such that the time derivative of
is identically equal to zero; i.e.
where and
refers to a continuous term. The sliding variable does not become identical to zero; i.e. the equality (
) does not exist. However, in the vicinity of the
;
where is the real term of
that provides motion in the vicinity of (
), and
represents the equivalent term. To obtain the equivalent control which directs
towards the sliding manifold
, then the concept of intermediate values can be introduced and the next step has to follow.
Step 2: Let the average term be the output of the following low pass filter (LPF):
where τ is a time constant, refers to the average values of
. The absolute error between the average value
and the equivalent value
can be determined by solving the following equation (Utkin, Citation1992);
The solution can be given by (AL-Samarraie & Mishary, Citation2018; Shtessel et al., Citation2014; Utkin, Citation1992)
where || ≤ N. From EquationEquation (11)
(11)
(11) it can be seen that |s(t)| ≤ Δ, Δ being a constant positive value, is the boundary layer that provided by the real control
wherein ideal motion (
), this boundary layer Δ is equal to zero thus.
In real motion and in the vicinity of , the equality
has not to be satisfied due to that
. In fact;
Therefore, to idealize the motion, the width of should be decreased. This, in turn, requires the increase of the gain value
of the switching term
. However, this would cause an increasing effect of the chattering phenomenon.
Remark 1: The equivalent term is the solution of
when
. Hence
and since
, then
where indicates an equivalent operator. This leads to
Remark 2: The LPF which has given in EquationEquation (25)(25)
(25) can also be written in the form:
and the following result can be reached
Finally, the structure of smoothed SMPO can be put in the following form;
when satisfying the conditions given in EquationEquation (31)(31)
(31) , one can get
Step 3: To eliminate the chattering which occurs in smoothed SMPO, the sign function is replaced by an approximation signum function as follows (AL-Samarraie & Mishary, Citation2018; Utkin, Citation1992):
where is an observer design parameter. By selecting the observer parameters k and
, the error in estimating the uncertainty in model parameters
is given by
where M = sup(t).
4. Super twisting sliding-mode control of PAM-actuated manipulator based on SMPO
According to EquationEquation (33)(33)
(33) , one can rewrite EquationEquation (14)
(14)
(14) as;
Let define the error between the actual angular position
and desired angular position
The time derivative of error is given by
The sliding surface can be defined by
Taking the time derivative of EquationEquation (39)(39)
(39) , one can have
In sliding control theory, the control law consists of equivalent part and switching part, that is,
The equivalent part can be obtained by setting . Therefore, based on EquationEquation (40)
(40)
(40) , the equivalent component can be determined.
The switch part is proposed to be
Then, the control law can now be written as
Accordingly, EquationEquation (40)(40)
(40) becomes
In order to ensure the asymptotic stability of PAM-actuated manipulator based on super-twisting SMC, the following candidate Lyapunov function is chosen
Taking the time derivative and using EquationEquation (45)(45)
(45) , one can obtain.
Using the mathematical fact and based on the elementary linear algebra, EquationEquation (47)
(47)
(47) can be written as
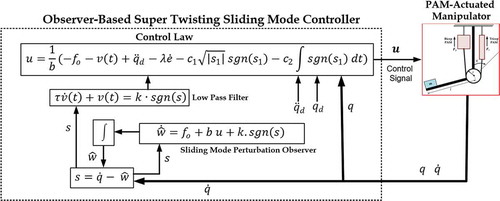
This indicates that the observer-based controlled system is asymptotically stable. ) shows the schematic diagram of the observer-based super-twisting sliding-mode control PAM manipulator.
Theorem: For the PAM-actuated manipulator system described by EquationEquation (14)(14)
(14) and based on SMPO to estimate the system uncertainty, the asymptotic stability of the system controlled by super-twisting SMC can be guaranteed according to EquationEquation (48)
(48)
(48) .
Figure 2. Schematic diagram of observer-based STSMC PAM manipulator
5. Optimization of design parameters
In order to guide the control of PAM-actuated manipulator based on STSMC and SMO-STSMC towards optimal performance, the design parameters of these controllers have to be tuned. The try-and-error procedure for finding or setting these parameters is cumbersome and it does not lead to the optimal solution in terms of the better dynamic performance of a controlled system. As such, the PSO technique has been suggested to find the optimal values of these parameters which could satisfy the perfect performance of proposed controllers towards best dynamic response (Anh et al., Citation2018; Humaidi & Hasan, Citation2019; Mobayen, Citation2018; Moezi et al., Citation2018). The design parameters for the STMC are ,
,
, while those for the SMO-STSMC are
,
,
,
,
, and
.
In PSO, each particle navigates around the search (solution) space by updating their velocity according to its own and also the other particles' searching experience. Each particle must update its velocity and position according to the number of iterations, of course, this job will have done according to some cost function to minimize or maximize the case. In our design, the cost function has to be minimized.
The velocity of each particle is updated according to the following equation:
where represents the inertia coefficient,
represents the personal acceleration coefficient, and
represents the social Acceleration coefficient.
The position of each particle is updated by the equation:
where and represents the current and updated vectors, respectively.
The cost function used to evaluate each particle during the search of minimum is chosen to be the Root Mean Square Error function (RMSE). In the present work, the setting of parameters for PSO algorithms is listed in .
Table 1. List of parameters assigned to PSO algorithm
6. Computer simulation
The numerical values of parameters for the PAM-actuated robotic arm are listed in . By using MATLAB/SIMULINK software package, the PAM-actuated robot based on proposed controllers has been modelled and coded in MATLAB m-functions using Simulink library blocks. shows the open-loop response for PAM-actuated single-arm manipulator tested by sin-wave input of unity amplitude and frequency (1 rad/sec).
Figure 3. Open-loop response for the Single-Arm Manipulator
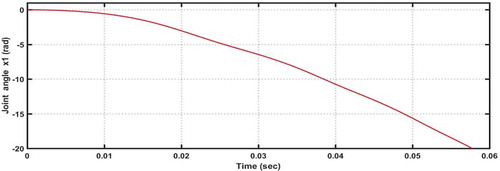
Table 2. The robotic arm parameters
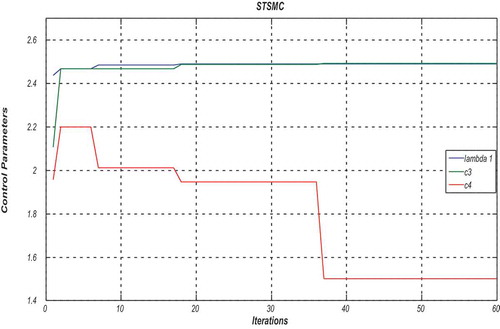
shows the behavior of cost function with respect to the iteration of the PSO algorithm for the angular tracking of PAM-actuated manipulator based on SMO-STSMC. It is evident that the PSO could guide the optimization process towards the minimization of the fitness function. The evolutions of design parameters for SMO-STSMC are shown in . The optimal design parameters will be assigned to the SMO-STSMC for optimal tracking observer-based control. However, the optimal design parameters can be found by the end of the optimization algorithm and they are listed in .
Table 3. The optimal values of design parameters for SMO-STSMC and STSMC based on the PSO algorithm
If the same PSO algorithm is conducted for the design parameters of the robotic system based on STSMC, the cost function is illustrated in . The figure indicates that the PSO algorithm could successfully conduct the design parameters of STSMC towards minimization of the cost function. Also, the behavior of design parameters for STSMC with respect to the algorithm’s iterations are shown in . The optimal design parameters can be found by the end of the optimization algorithm and are listed in .
Figure 4. Evolution of the objective function versus the iterations using SMO-STSMC
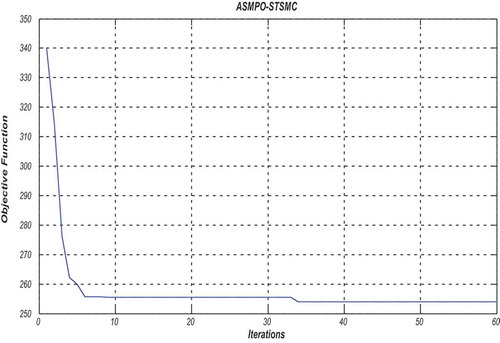
Figure 5. Evolution of the optimized parameters (,
and
) versus iterations.
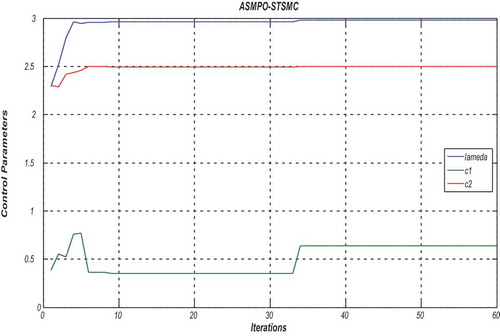
Figure 6. Evolution of the optimized parameters ( and
) versus the iterations.
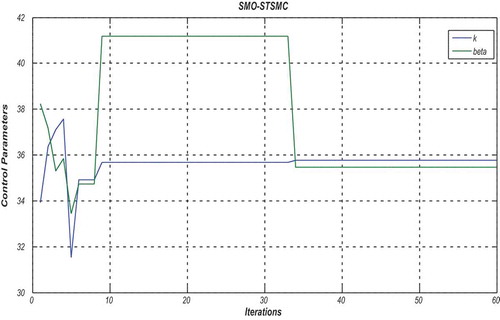
Figure 7. Evolution of the optimized
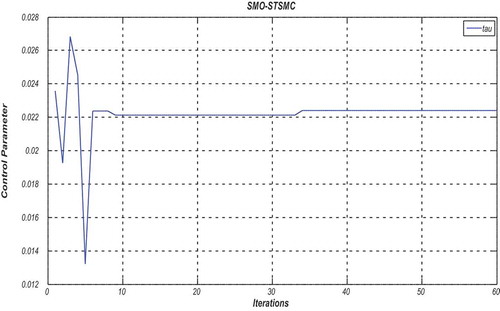
() versus iterations.
Figure 8. Evolution of the objective function versus the iterations by using STSMC
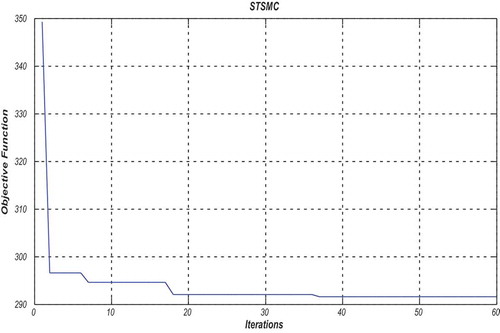
Figure 9. Evolution of the optimized parameters (,
, and
) versus iterations.
Four scenarios are presented in the present work. In the first scenario, the uncertainty and disturbance are not taken into account and only the uncertainty has been considered in the second scenario. In the third scenario, the effectiveness of observer-based controller has been studied under disturbance application, while the fourth scenario has addressed the case of both uncertainty and disturbance. For all cases, the desired angular position applied for the closed robotic system is described by
where, .
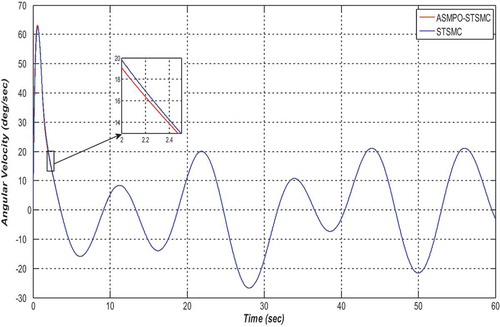
Scenario I: In the case of an uncertainty-free system, the tracking behavior of angular position and velocity for a robotic system based on SMO-STSMC and STSMC are depicted in and , respectively.
Figure 10. Angle response without uncertainty
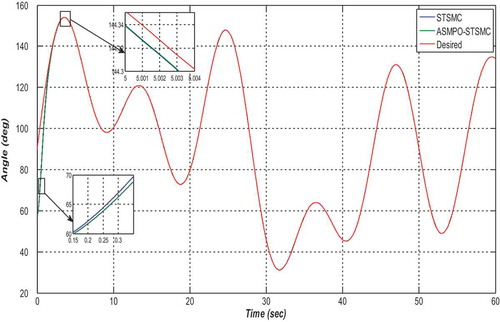
Figure 11. Angular velocity without uncertainty
The control signals resulting from both controllers is illustrated in . gives the tracking errors due to proposed controllers. depicts the responses of sliding variables from both control strategies. The uncertainty estimation is displayed in . It is clear from the figure that the observer finally produces zero value of uncertainty, which is the actual cause of this scenario.
Figure 12. Control action without uncertainty
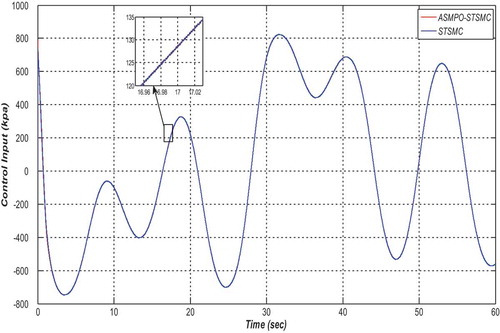
Figure 13. Angle error signal without uncertainty
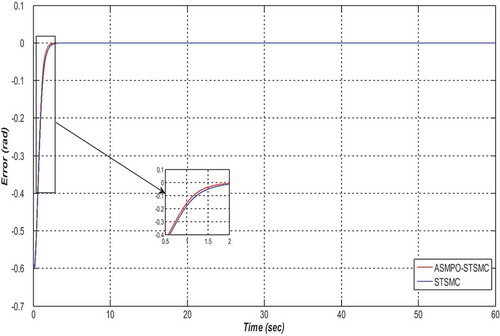
Figure 14. Surface variable without uncertainty
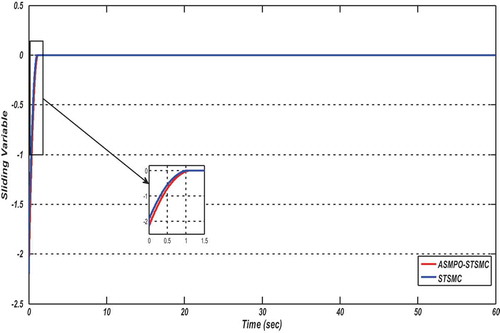
Figure 15. Estimated uncertainty without uncertain
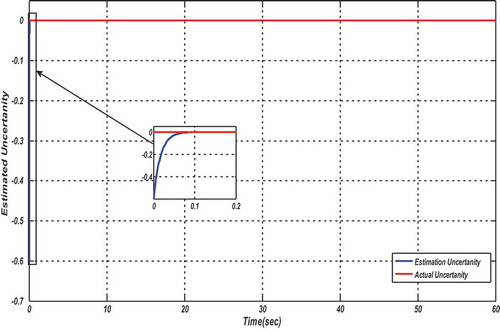
Scenario II: In the next scenario, the uncertainty has been allowed within 5% from nominal and the effectiveness of the controllers has been assessed accordingly. and shows the tracking performance of angular position and velocity, respectively. The control action due to the application of proposed controllers is depicted in . The error behaviors resulting from the controllers are shown in . It is clear from that the figure that the STSMC based on uncertainty observer shows less error deviation than conventional STSMC.
shows the behavior of the sliding variables based on both controllers. The figure indicates that the response resulting from the classical STSMC shows noticeable ripple behavior around zero equilibrium at a steady state. On the contrary, the response based on observer-based STSMC shows that the sliding variable finally settles to zero value in a monotonic manner. The estimation of uncertainty has been addressed using , where the uncertainty observer could successfully estimate the uncertainty in a good manner.
Figure 16. Angle response with 5% uncertainty in parameters
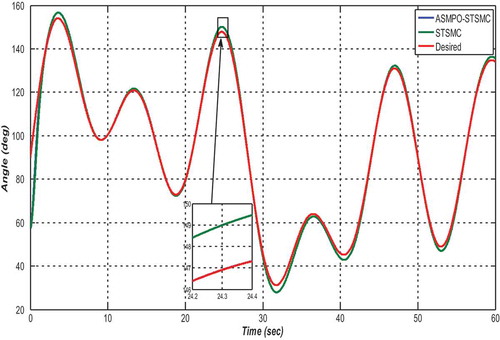
Figure 17. Angular velocity response with 5% uncertainty in parameters
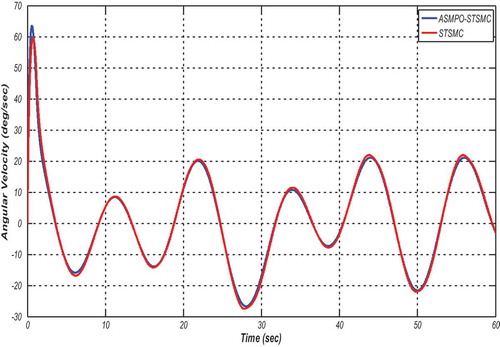
Figure 18. Control action with 5% uncertainty in parameters
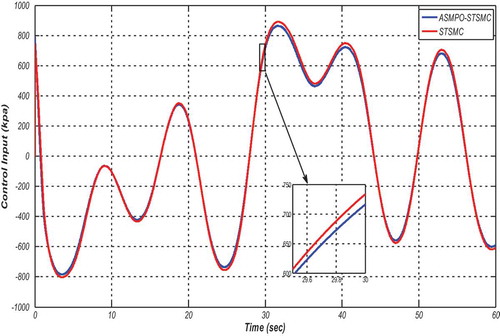
Figure 19. Angle error signal with 5% uncertainty in parameters
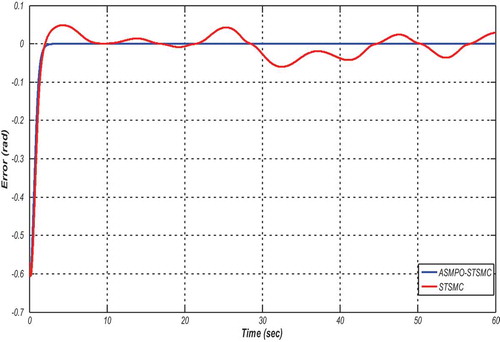
Figure 20. Surface curve with 5% uncertainty in parameters
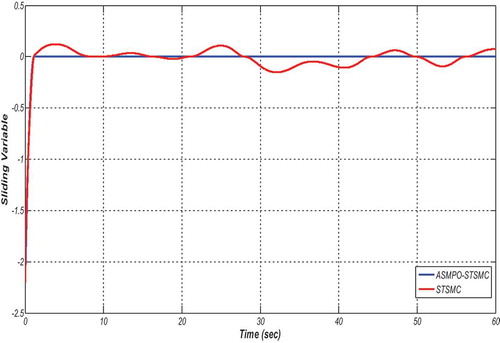
Figure 21. Estimated uncertainty with 5% uncertainty in parameters
Scenario III: In the third scenario, a disturbance of the following behavior has been applied to the PAM robotic system:
The behavior of angular position and velocity of the robot arm under-exerted disturbance is shown in and , respectively. shows the control signals due to both controllers. The error behaviors resulting from both STSMC and SMO-STSMC are depicted in , while the sliding variable behaviors are shown in . The super-twisting effect can be noticed in the behavior of sliding variables, which converge to the equilibrium point in a monotonic manner. gives the behavior of the observer under disturbance. It is clear that the observer could successfully estimate the disturbance and the estimated disturbance will be used by the controller for compensating or rejecting the actual disturbance.
Figure 22. Angle response under disturbance
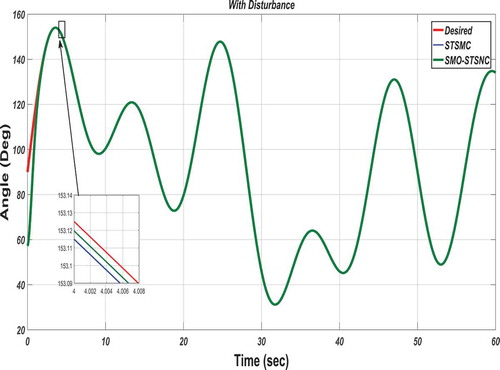
Figure 23. Angular velocity response under disturbance
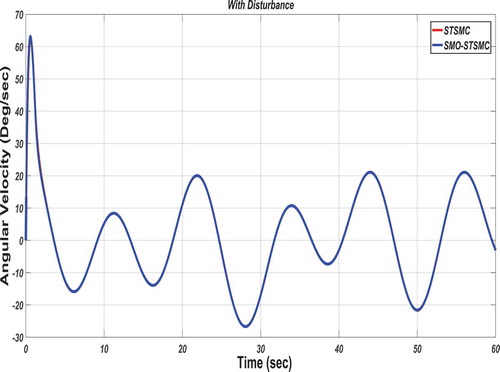
Figure 24. Control signals due to both controllers
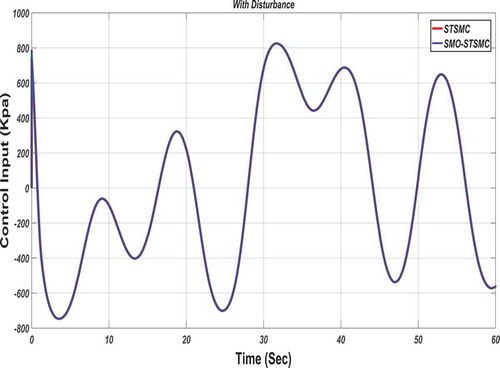
Figure 25. The error responses due to both controllers (Under disturbance)
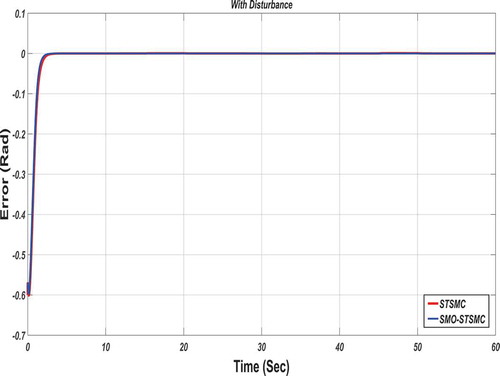
Figure 26. Responses of Sliding Variables
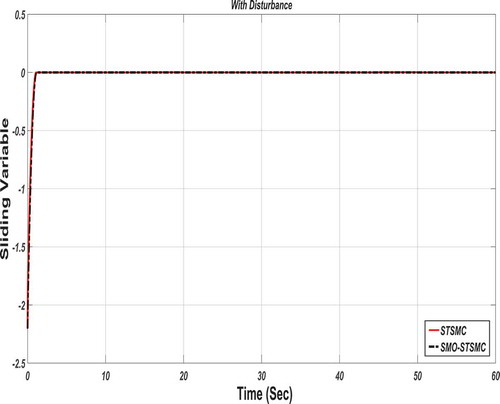
Figure 27. Disturbance Estimation
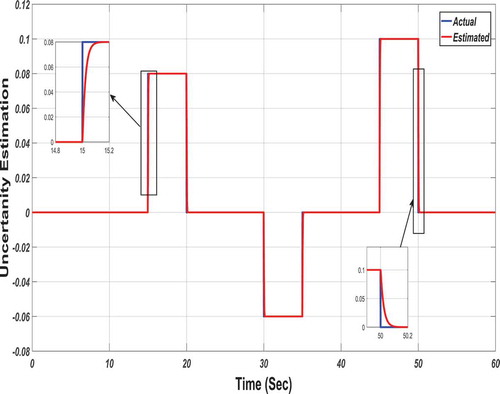
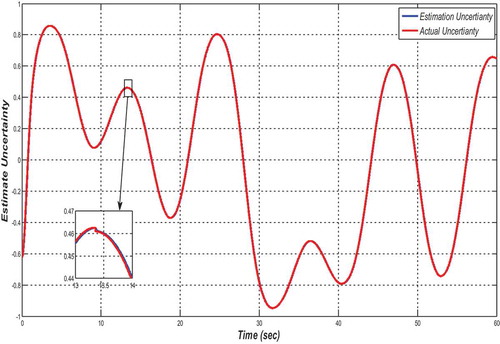
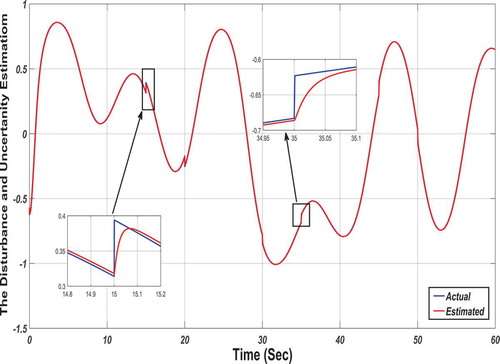
Scenario IV: In this scenario, the combined effect of both parameter uncertainty and external uncertainty (disturbance), on the performance of both STSMC and SMO-STSMC will be investigated. The characteristics of considered uncertainties are the same given in scenarios I and II. and gives the angular position and angular velocity of the robotics arm, respectively. shows the control signals due to both controllers. The error behaviors resulting from both STSMC and SMO-STSMC are depicted in , while the sliding variable behaviors are shown in . gives the performance of the observer in the presence of both parameter uncertainty and disturbance. It is clear from the figure that the observer could estimate the combination of both uncertainties (parametric and external).
Figure 28. Angle response (with combined effect)
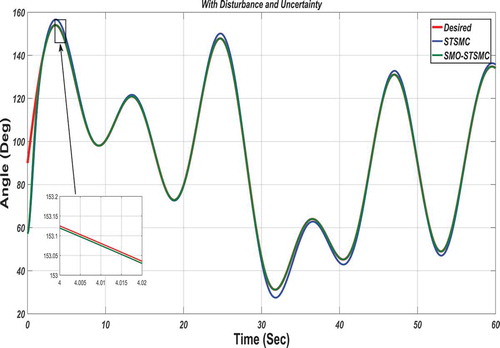
Figure 29. Angular velocity response (with combined effect)
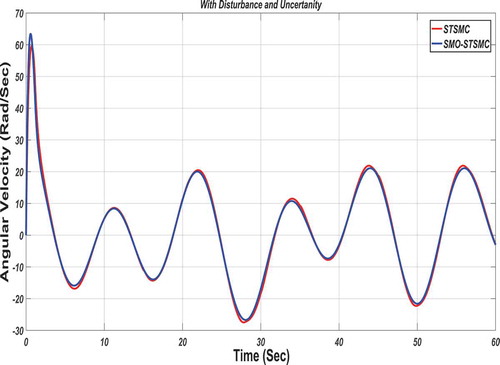
Figure 30. Control signals due to both controllers (with combined effect)
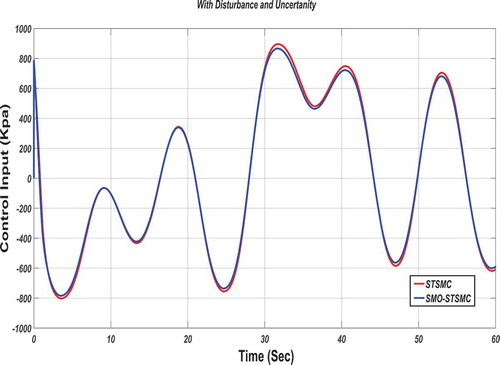
Figure 31. The error responses due to both controllers (with combined effect)
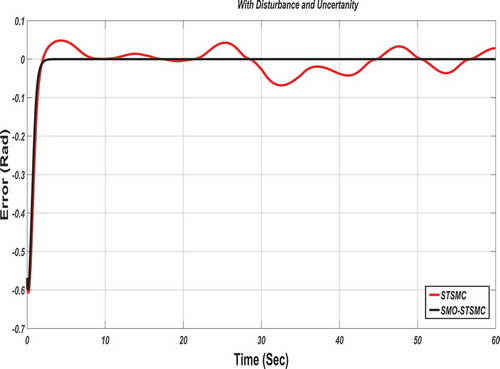
Figure 32. Responses of Sliding Variables
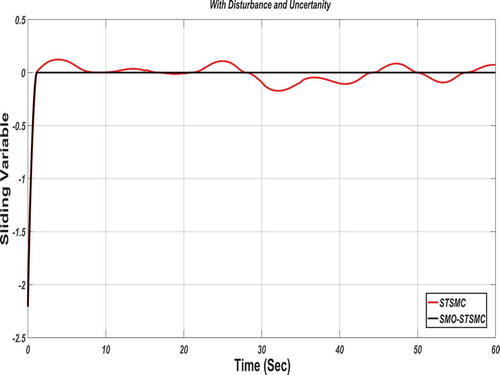
Figure 33. Disturbance-Uncertainty Estimation
reports the performance of controllers in terms of tracking errors based on the above four cases. The Root Mean Square Error (RMSE) has been used as a measuring index to evaluate the tracking performance of STSMC and SMO-STSMC under-aforementioned conditions. According to data calculated in , one can conclude that the STSMC based on perturbation observer gives more robust characteristics against variation of parameters and better disturbance rejection capability than STSMC.
Table 4. The numerical reports of the dynamic performance of proposed controllers
7. Conclusions
This paper presented the design of two versions of a super twisting sliding-mode controller (STSMC and SMO-STSMC) for the PAM-actuated robotic arm. The first controller (STSMC) is based on state feedback acquisition, while the SMO-STSMC is based on a perturbation observer. The asymptotic stability of the controlled system using these controllers has been proven and the controller laws have been developed. Four cases have been considered to evaluate the performance of proposed controllers: uncertainty-free case, parametric uncertainty case, disturbance case, and parametric uncertainty with disturbance case. A comparison study has been conducted via computer simulation and the RMSE has been used as a measuring index to evaluate the tracking performance of STSMC and SMO-STSMC under the aforementioned conditions. The conclusion has been drawn based on a numeric evaluation that the STSMC based on perturbation observer gives better tracking performance, more robust characteristics against variation of parameters, and better disturbance rejection capability than STSMC. Moreover, based on the behavior of cost function, further improvement in performance for both proposed controllers with the favor of the PSO algorithm.
The future of the work will focus on real-time implementation of the proposed controller on an actual PAM-actuated robot arm. Also, an adaptive scheme of STSMC can be developed and validated with the present study for the same robot structure. Besides, the PSO technique can be used as a comparison format with other recent optimization techniques.
Additional information
Funding
Notes on contributors
Alaq Falah
The authors of the paper are specialized in different trends in control engineering. Most of them are academic members and they are affiliated with different universities. The scope of their fields includes nonlinear control, intelligent control, adaptive control, mechanical design, and robotic control and applications. The topic of this study can be further extended to consider parallel PAM-actuated robots, Biomechatronic Device and PAM-actuated hand or leg. This human-assisted device based on PAM-actuators will motivate the authors to apply different and modern control strategies for better improvement in their performance and characteristics.
References
- Al-Jodah, A., & Khames, L. (2018). Second order sliding mode controller design for pneumatic artificial muscle. Journal of Engineering, 14(1), 159-172. https://iasj.net/iasj/article/135837
- Allawi, Z. T., Ibraheem, I. K., & Humaidi, A. J. (2019, September). Fine-tuning meta-heuristic algorithm for global optimization. MDPI, Processes Journal, 7(10), 657. https://doi.org/10.3390/pr7100657
- AL-Samarraie, S. A., & Mishary, M. H. (2018). A chattering free sliding mode observer with application to DC motor speed control. In IEEE, Third Scientific Conference of Electrical Engineering (SCEE)(pp. 259–30). University of Technology-Iraq.
- Anh, H. P., Kien, C. V., Son, N. N., & Nam, N. T. (2018). New approach of sliding mode control for nonlinear uncertain pneumatic artificial muscle manipulator enhanced with adaptive fuzzy estimator. Sage, International Journal of Advanced Robotic Systems, 15(3), 1–11. https://doi.org/10.1177/1729881418773204
- Ba, D. X., & Ahn, K. K. (2018). A robust time-delay nonlinear controller for a pneumatic artificial muscle. International Journal of Precision Engineering and Manufacturing, 19(1), 23–30. https://doi.org/10.1007/s12541-018-0003-5
- Boudoua, S., Hamerlain, M., & Hamerlain, F. (2015, April 9-11). Intelligent twisting sliding mode controller using neural network for pneumatic artificial muscles robot arm. In IEEE Explorer, International Workshop on Recent Advances in Sliding Modes (RASM). IEEE .
- Caldwell, D. G., Medrano-Cerda, G. A., & Goodwin, M. (1995, February). Control of pneumatic muscle actuators. IEEE Control Systems Magazine, 15(1), 40–48. https://doi.org/10.1109/37.341863
- Caldwell, D. G., Medrano-Cerda, G. A., & Goodwin, M. J. (2002, August). Braided pneumatic actuator control of a multi-jointed manipulator. In IEEE Explorer, Proceedings of IEEE Systems Man and Cybernetics Conference. IEEE.
- Choi, T. Y., Lee, J. Y., & Lee, J. J. (2006, October 9-15). Control of artificial pneumatic muscle for robot application. In Proceedings of the 2006 IEEE/RSJ, International Conference on Intelligent Robots and Systems. IEEE.
- Cui, Y., Matsubara, T., & Sugimoto, K. (2017). Pneumatic artificial muscle-driven robot control using local update reinforcement learning. Taylor and Francis, Advanced Robotics.
- Farag, M., & Azlan, N. Z. (2015). Adaptive backstepping position control of pneumatic anthropomorphic robot hand, Elsevier, Procedia Computer Science 76, 161-167. https://doi.org/10.1016/j.procs.2015.12.334
- Feng, Z., & Fei, J. (2018). Design and analysis of adaptive Super-Twisting sliding mode control for a micro-gyroscope. PLoS ONE, 13(1), e0189457, 1-18. https://doi.org/10.1371/journal.pone.0189457
- Gao, Z., & Zhao, J. (2019). An improved grey wolf optimization algorithm with variable weights. Hindawi, Computational Intelligence and Neuroscience, 2019, Article ID2981282. 1–13. https://doi.org/10.1155/2019/2981282
- Haghighi, D. A., & Mobayen, S. (2018). Design of an adaptive super-twisting decoupled terminal sliding mode control scheme for a class of fourth-order systems. ISA transactions, 75, 216-225. https://doi.org/10.1586610.1016/j.isatra.2018.02.006.
- Hameed, A. H., Al-Dujaili, A. Q., Humaidi, A. J., & Hussein, H. A. (2019). Design of terminal sliding position control for electronic throttle valve system: A performance comparative study. International Review of Automatic Control (IREACO), 12(5), 251. https://doi.org/10.15866/ireaco.v12i5.16556
- Haskara, I., Hatipoglu, C., & Ozguner, U. (2002). Sliding mode compensation, estimation and optimization methods in automotive control. LNCIS 274. Springer-Verlag Berlin Heidelberg.
- Huang, J., Ri, S., Fukuda, T., & Wang, Y. (2019). A disturbance observer based sliding mode control for a class of underactuated robotic system with mismatched uncertainties. IEEE Transaction on Automatic Control, 64(6), 2480-2487.
- Humaidi, A. J., & Hameed, M. (2019, January 22). Development of a new adaptive backstepping control design for a non-strict and under-actuated system based on a PSO Tuner. MDPI, Information Journal, 10(2),1-17 https://doi.org/10.3390/info10020038
- Humaidi, A. J., & Hasan, A. F. (2019). Particle swarm optimization–based adaptive super-twisting sliding mode control design for 2-degree-of-freedom helicopter. Sage, Measurement and Control Journal, 52(9–10), 1403–1419. https://doi.org/10.1177/0020294019866863
- Humaidi, A. J., Ibraheem, I. K., Azar, A. T., & Sadiq, M. E. (2020). A new adaptive synergetic control design for single link robot arm actuated by pneumatic muscles. MDPI, Entropy, 22(7), 723. https://doi.org/10.3390/e22070723
- Humaidi, A. J., Kadhim, S. K., & Gataa, A. S. (2020, May 23). Development of a novel optimal backstepping control algorithm of magnetic impeller-bearing system for artificial heart ventricle pump. Cybernetics and Systems: An International Journal, 51(4), 21. https://doi.org/10.1080/01969722.2020.1758467
- Kennedy, J., & Eberhart, R. (1995). Particle swarm optimization. In Proceedings of IEEE International Conference on Neural Networks. IEEE.
- Kürkçü, B., Kasnakoğlu, C., & Efe, M. Ö. (2018, November). Disturbance/uncertainty estimator based integral sliding-mode control. IEEE Transactions on Automatic Control, 63(11), 3940–3947. https://doi.org/10.1109/TAC.2018.2808440
- Li, H., Shi, P., Yaoa, D., & Wue, L. (2017). Observer-based adaptive sliding mode control for nonlinear Markovian jump systems. Elsevier, Automatica, 64, 134–142. https://doi.org/10.1016/j.automatica.2015.11.007
- Lilly, J. H. (2003, September). Adaptive tracking for pneumatic muscle actuators in bicep and tricep configurations. IEEE Transactions on Neural Systems and Rehabilitation Engineering, 11(3), 333–339. https://doi.org/10.1109/TNSRE.2003.816870
- Lilly, J. H., & Yang, L. (2005, July). Sliding mode tracking for pneumatic muscle actuators in opposing pair configuration. IEEE Transactions on Control Systems Technology, 13(4), 550–558. https://doi.org/10.1109/TCST.2005.847333
- Liu, J. (2017). Sliding Mode Control Using MATLAB Simulation. Elsevier, Academic Press.
- Maqsood, H., & Qu, Y. (2020). Nonlinear disturbance observer-based sliding mode control of quadrotor helicopter. Springer, Journal of Electrical Engineering & Technology, 15(3), 1453–1461. https://doi.org/10.1007/s42835-020-00421-w
- Mirjalili, S. (2016). A Sine Cosine Algorithm for solving optimization problems. Knowledge-Based Systems, 96, 120–133. https://doi.org/10.1016/j.knosys.2015.12.022
- Mobayen, S. (2018). Adaptive global terminal sliding mode control scheme with improved dynamic surface for uncertain nonlinear systems. Springer, International Journal of Control, Automation and Systems, 16(X), 1–9. https://doi.org/10.1007/s12555-017-0473-8
- Mobayen, S., & Javadi, S. (2015). Disturbance observer and finite-time tracker design of disturbed third-order nonholonomic systems using terminal sliding mode. Sage, Journal of Vibration and Control, 1–9. https://doi.org/10.1177/1077546315576611
- Mobayen, S., & Tchier, F. (2017). Nonsingular fast terminal sliding-mode stabilizer for a class of uncertain nonlinear systems based on disturbance observer. Transactions on Computer Science & Engineering and Electrical Engineering (D), 24(3), 1410–1418. https://doi.org/10.24200/SCI.2017.4123
- Moezi, S. A., Zakeri, E., & Zare, A. (2018). Generally modified cuckoo optimization algorithm for crack detection in cantilever Euler-Bernoulli beams. Precision Engineering, 52, 227–241. https://doi.org/10.1016/j.precisioneng.2017.12.010
- Nasiri, J., & Khiyabani, F. M. (2018). A whale optimization algorithm (WOA) approach for clustering. Cogent Mathematics & Statistics, 5(1), 1. https://doi.org/10.1080/25742558.2018.1483565
- Poli, R., Kennedy, J., & Blackwell, T. (2007). Particle swarm optimization: An overview, Swarm Intelligence. Springer.
- Repperger, D. W., Johnson, K. R., & Phillips, C. A. (1998). A VSC position tracking system involving a large-scale pneumatic muscle actuator. In Proceedings of the 37th IEEE Conference on Decision & Control Tampa. IEEE.
- Rynolds, D. B., Repperger, D. W., Phillpis, C. A., & Bandry, G. B. (2003). Modeling the dynamic characteristics of pneumatic muscle. Annals of Biomedical Engineering, 31(3), 310–317. https://doi.org/10.1114/1.1554921
- Scaff, W., Horikawa, O., & Tsuzuki, H. (2018). Pneumatic artificial muscle optimal control with simulated annealing. IFAC, Elsevier.
- Shtessel, Y., Edwards, C., Fridman, L., & Levant, A. (2014). Sliding mode control and observation. Springer Science-Business Media New York.
- Spurgeon, S. K. (2008). Sliding mode observers: A survey. Taylor & Francis, International Journal of Systems Science, 39(8), 751–764. https://doi.org/10.1080/00207720701847638
- Tarapong, K., & Radom, P. (2008). Adaptive control for a one-link robot arm actuated by pneumatic muscles. Chiang Mai Journal of Science, 35(3), 437–446. http://www.webme.eng.cmu.ac.th/MEPUB/ASPUpload/Abstract/353_05AdaptiveTarapong.pdf
- Tsagarakis, N. G., & Darwin, G. C. (2000). Improved modeling and assessment of pneumatic muscle actuators. In Proceedings IEEE International Conference on Robotics and Automation. IEEE.
- Utkin, V. I. (1992). Sliding Modes in Control and Optimization. Springer-Verlag Berlin Heidelberg.
- Utkin, V. I. (2008). Sliding mode control: Mathematical tools, design and applications. In P. Nistri & G. Stefani (Eds.), Nonlinear and optimal control theory. Lecture Notes in Mathematics (Vol. 1932. pp 289-347). Springer.
- Utkin, V. I., Guldner, J., & Shi, J. (2017). Sliding mode control in electro-mechanical systems (2nd ed.). Taylor & Francis Group, CRC.
- Wu, L., Yang, R., Sun, G., Zhao, X., & Shi, P. (2015). New Developments in Sliding Mode Control and Its Applications 2014. Mathematical Problems in Engineering.
- Xi, X., Mobayen, S., Ren, H., & Jafari, S. (2017). Robust finite-time synchronization of a class of chaotic systems via adaptive global sliding mode control. Sage Journal of Vibration and Control, 24(17), 3842-3854. https://doi.org/10.1177/1077546317713532