
ABSTRACT
Remote operation offers promising advantages as a viable transitional phase toward autonomous ships, but at the same time, it introduces new challenges in maintaining situation awareness. However, situation awareness is misunderstood as an essential construct for only navigational tasks, albeit situation awareness issues are recurrently reported during system monitoring, e.g. power plants. Hence, this within-subjects study developed the two situation awareness support systems for engine room monitoring based on information requirements and schema instantiation. Sixteen marine engineers participated in the four simulation experiments, and their objective and subjective situation awareness, fault detection rate, response speed and change blindness were evaluated. The findings describe that presenting a few critical perception elements for comprehension is promising to mitigate interface complexity and enable efficient pattern matching. However, caution is necessary for selecting the means of access to elements of low importance, as it can induce attentional tunnelling and additional cognitive load, which can devastate the situation awareness and fault-detecting performance when compounded by high cognitive load from primary monitoring tasks. This study recommends entailing the current level of situation awareness, cognitive load and stress into the support system design to determine the extent and timing of assistance for varying operational demands.
Introduction
The maritime autonomous surface vessel is envisaged as a final product of maritime autonomy (IMO, Citation2021). Of the four autonomy degrees, remote operation connects contemporary vessels and fully autonomous ships in the second and third stages and offers numerous benefits. Removing accommodation space reduces construction and maintenance costs and energy consumption (Allal et al., Citation2018). Slow steaming becomes less economically demanding due to the increased cargo space. Monitoring multiple vessels simultaneously instead of allocating marine crews on each vessel helps reduce labour costs. Motion sickness, sleep deprivation and the sense of isolation will no longer be causes of the significant shortfall of young seafarers in the future (Shenoi et al., Citation2015).
A particular concern with remote operation is the removal of ship sense, e.g., vibration and body orientation, which plays a vital role in situation awareness (Porathe et al., Citation2014). For instance, Yoshida et al. (Citation2020) discovered that visibility was employed in acquiring most perceptual information, followed by body balance, thermal sense, sound and smell. The previous autonomous ship projects also yielded a similar conclusion that a lack of ship sense in the shore control centre would be a critical challenge for operators to understand the situation, and the absence of full comprehension of the ship’s condition can lead to incidents (AAWA, Citation2016; MacKinnon et al., Citation2015).
These insights have led the current autonomous ship initiatives to include the situation awareness support system. For instance, the KASS (Korea Autonomous Surface Ship Project) has been developing the situation awareness support system as a part of an intelligent navigation system (KASS, Citation2021) and the DFFAS (Designing the Future of Full Autonomous Ship) project is underway to innovate through the 3D surrounding bird view (NYKLINE, Citation2020). However, the main problem with current approaches is that situation awareness is deemed equivalent to visual awareness of the surroundings, and navigation is the sole task requiring the support system even though the engine room monitoring forms another half of ship operation safety. As a result, the current paradigms in designing support systems are limited to no more than replicating traditional visual stimuli for navigation and portraying them on the screens assisted with automated functions, e.g., object detection.
While these approaches appear to emerge from narrowly adopting situation awareness of aviation pilots and automobile drivers, situation awareness issues are not restricted to maneuvering but extend to air traffic control (Endsley, Citation1999), healthcare (Dekker, Citation2015) and power plants (Burns et al., Citation2008). Operators in the above domains do not engage in the physical activity of directly maneuvering any objects, yet situation awareness of patients, air traffic, and power plants is vital for adequate decision-making and incident prevention. For instance, Patrick et al. (Citation2007) investigated forty-one nuclear power incidents and identified a lack of awareness of plant and sub-system status as a driving cause of eighteen cases. More recently, Solberg et al. (Citation2023) discovered that over half of fifty-eight incidents during the planned outage involved comprehension errors such as lack of mental model and over-reliance on default values. These case studies elucidate the importance of situation awareness and support systems for system monitoring, that is, engine room monitoring in the context of maritime industry which closely resembles the nuclear plant monitoring in which nemorus systems strive for operators attention. However, no research has attempted to examine the situation awareness during engine room monitoring nor design the situation awareness support system.
Endsley (Citation1988) articulated the most well-acknowledged definition of situation awareness in three levels: “the perception of the elements in the environment within a volume of time and space, the comprehension of their meaning and the projection of their status in the near future.” The first level is a direct perception of elements that reflect the current environment, such as simple read-outs and bodily information. However, a direct perception alone is insufficient to constitute situation awareness, as one must consider the relationships among the perception elements. In the context of engine room monitoring, high cooling water temperature for engines may not necessarily be due to abnormal changes within the system but to changes in seawater temperature. Endsley described it as comprehension, an integration of multiple pieces of information and their relevance to one’s goal. Projection is the highest level of situation awareness and the ability to anticipate future situations based on the present, which is essential for decision-making and separates skilled experts from novices.
According to her theory, long-term memory, one of the individual factors that form situation awareness, was discerned as mental models and schema (i.g., prototypical mental model). Mental models direct attention, assist information classification at the perceptual level and provide a mental layout for integrating information to form comprehension and projection of future states based on available information. In other words, a set of sensory cues that reflects the characteristics of the environment is compared to one’s mental template of the environment. When patterns from both are similar or identical, one can be aware of their meaning. This raises the possibility that particular cues or characteristics may better activate one’s schema or mental models.
The activation of schemata is called schema instantiation. Several studies were undertaken to examine schema instantiation in text understanding. Anderson et al. (Citation1976) identified that instantiation-relevant cues remind participants better of the sentence they read than general cues. The instantiation-relevant cues were the images of the subject in the given sentence, while general cues were the subject. For example, when the sentence “the woman was outstanding in the theatre” was provided, the actress (image) and woman (subject) were given cues to recall. Mutzenich et al. (Citation2021) proposed that some information, such as the vehicle colour, may not be as important as vehicle trajectory and that knowing a minimum situation awareness requirement for remote drivers would be critical for future training. This notion was described as categorisation mapping in the situation awareness theory, stating that the environment does not need to be identical to the schema (Endsley, Citation2016). Similarly, it was suggested that schema instantiation does not require all memory markers when a cue is highly indicative (An, Citation2013).
The above characteristics of situation awareness and schema offer two insights in designing the situation awareness support system for engine room monitoring. First, presenting lower-level information around higher-level situation awareness, that is, grouping read-outs forming comprehension together, can be a promising strategy to relieve operators’ mental workload from sorting and integrating individual engine room parameters to form an understanding of systems. With the spare mental workload, operators may acquire situation awareness and respond to unexpected events better. However, this complicates the interface as a single perception element can comprise multiple comprehension during engine room monitoring (Han et al., Citation2024). Cue strength differences in schema instantiation can alleviate the interface complexity and may enable efficient pattern matching in acquiring situation awareness, that is, understanding with fewer but critical sets of perception elements. In order to test these hypotheses, this research developed the two situation awareness support systems and examined their effects on situation awareness, fault-detecting performance and change blindness through engine room simulation experiments.
Materials and methods
The research has been approved by the University of Tasmania Human Research Ethics Committee (Project ID: 24900). The research employed a simulation-based experiment over other interface testing methods (e.g., qualitative questionnaires and focus interviews) as it provides a similar task environment to the actual engine room monitoring and enables identifying changes in situation awareness over time through both objective and subjective measures, while qualitative approaches are limited to providing subjective and discrete user impression of the interface independent of time and space.
Participants
This within-subjects study invited and recruited sixteen marine engineers with an average sea experience of 4.14 years via the researcher’s professional contacts. Eight of them were senior marine engineers (i.g., second engineers), and the rest were junior engineers (i.g., third and fourth engineers).
Monitoring interfaces
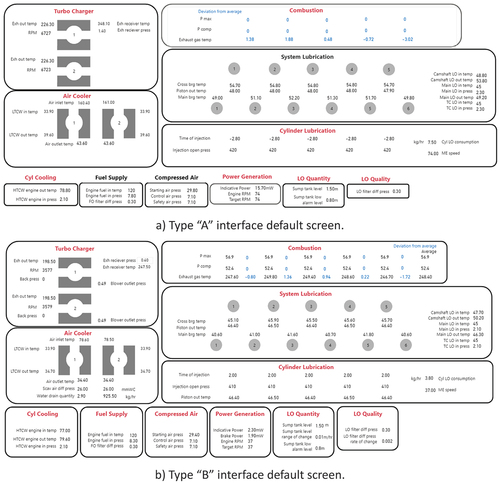
The study employed three software to design two 14-inch engine room monitoring interfaces: type “A” and “B.” It included the Kongsberg engine room simulator for data generation, Azure SQL database for data storage and Power BI for data demonstration. First, time-series datasets were collected from the simulator with a sampling rate of two seconds and stored in the database. Within the database, a set of codes was designed to execute the transfer of a single row from the datasets to the empty table every two seconds. The empty table was connected to Power BI, a dashboard design application that automatically refreshed its screen every second. This method allowed the replication of real-time monitoring and comparison of similar but different display designs with minimal interruption from original display styles, e.g., font size, when simulators did not support display modifications.
Both interfaces presented perception elements grouped by comprehension elements based on situation awareness information requirements (Han et al., Citation2024) but differed in the presentation of default perception information. The type “A” interface displayed important perception elements (mode >4) as default, while the type “B” interface showed all elements regardless of their importance ratings found from the previous research (Han et al., Citation2024). However, the type “A” interface still provided access to the less important elements (mode ≤4), so the volume of available information for detecting system faults remains the same in both conditions. These elements can be seen by clicking the comprehension elements shown in red, which opens a pop-up box containing the additional descriptors. Both interfaces are shown in .
Figure 1. The default screens of the two situation awareness support systems. The type “A” shows only important perception elements in comprising comprehension as default, while all information are shown in the type “B” interface.
Monitoring scenario
The research developed four monitoring scenarios through the Kongsberg engine room simulator (ship model: MC90-V). Each monitoring scenario had one of two initial conditions with varying levels of ship speed, either low or full speed and ran for 9.5 minutes, as shown in . Two system faults were designed to be triggered at different times in each scenario and continue for two minutes. There were four system faults, including air cooler leakage (F1), cylinder exhaust valve leakage (F2), high-temperature cooling water pump wear (F3) and turbocharger air filter blockage (F4). All faults had at least one variable shown as default information in both interfaces and expandable information in the type “A” interface, so the important perception elements alone could indicate changes within the system. For instance, the air cooler leakage had two variables: air outlet temperature and the water drain quantity. The former information was shown as default information in both interfaces, while the latter was expandable information in type “A” and default information in the type “B” interface.
Table 1. The monitoring scenario description with fault details, ship initial conditions and interface types.
Procedure
One-to-one experiments were conducted online and recorded through Zoom. Participants were given control over the host simulation display, and the researcher was present throughout all experiments to monitor their interaction and prompt the questionnaires. Before the experiments, participants received ten minutes of familiarisation sessions about interface designs and two experiment tasks in which they had to speak out the names of abnormal parameters and answer situation awareness queries during and after experiments. Half of the participants commenced from the first monitoring scenario to the last scenario, while the scenario order was reversed for the rest to mitigate the learning and fatigue effects. Upon completing the experiments, the participants had opportunities to discuss each interface.
Measurement
Situation awareness
This research employed objective and subjective methods to measure operators’ situation awareness. As an objective measurement, the Situation Awareness Global Assessment Technique (SAGAT) compares participants’ answers to ground truth to acquire multiple snapshots of situation awareness throughout the experiment. This research developed eight perception and six comprehension queries based on the situation awareness information requirement. Perception queries were multiple-choice questions with four options, and comprehension queries were binary. Projection queries were not included in this research due to the limited simulator capacity, lack of importance rating on perception elements in comprising projection and lack of historical and operational information (e.g., conditions in past months and voyage specification). Each scenario contained three sets of four to five SAGAT queries, presented during the freezes according to the SAGAT guidelines (Endsley, Citation2000). Participants could not refer to the blanked simulator while answering the questions, and the first freeze was made after three minutes of the simulation to allow them to develop an initial mental model. No two freezes were made within one minute of each other, and questions were randomly distributed except for system fault questions that appeared at the fault stop time. As a result, thirty-two samples per SA query in each design option were collected. The SAGAT queries are shown as follows.
Perception
P1. What is the temperature of the No.2 air cooler air outlet?
P2. What is the drain quantity of the No.2 air cooler?
P3. What is the exhaust gas temperature of the No.1 cylinder?
P4. What is the No.1 cylinder exhaust gas temperature deviation from the average?
P5. What is the RPM of the No.1 turbocharger?
P6. What is the blower outlet pressure of the No.1 turbocharger?
P7. What is the HTCW engine inlet pressure?
P8. What is the HTCW engine inlet temperature?
Comprehension
C1. Is combustion status adequate?
C2. Is the No.2 air cooler adequate?
C3. Is the cylinder cooling adequate?
C4. Is the No.1 turbocharger adequate?
C5. Is system lubrication adequate?
C6. Is compressed air adequate?
As a subjective measure of situation awareness, this study employed the 3-Dimensional Situation Awareness Rating Technique (3D SART) over the original technique due to time constraints. The 3D SART measures a level of attentional demand, supply and understanding on a seven-point scale to calculate overall subjective situation awareness. The following questionnaire was presented at the end of each scenario.
Attentional demand. How demanding task is on your attentional resource?
Attentional supply. How much attention are you supplying to the task?
Understanding. How well do you understand the situation?
Fault detection performance and change blindness
The research measured the participant’s fault response time and detection rate on each fault and interface. The response time was from the fault start time to when participants spoke out the name of the abnormal parameter. Other than explicit verbal reports, any activities suggestive of recognition were considered no response as their intention was unknown and implicit at the time of the simulation, e.g., circling around the abnormal parameter with a mouse. Responses beyond the two minutes of the fault activation period and no responses were treated as the slowest response, two minutes, to avoid substantial data loss from removing unpaired outcomes in the within-subject experiment. Experiment recordings were examined with an audio analysis tool to calculate the response time and round down milliseconds to the nearest second. The correct and missed detections were calculated based on the participant’s answers to the four comprehension questions from C1 to C4, corresponding to four system faults.
The change blindness was investigated based on the participant’s answers to the four SAGAT perception and comprehension questions, corresponding to four system faults. The number of incorrect responses for comprehension queries represented the frequency of change blindness as participants did not recognise system failures. The wrong responses to perception queries further explained whether the change blindness was due to the failure to remember an initial parameter before the fault occurrence or the failure to compare the initial parameter to the changed parameter by the faults. These failure types were described as encoding and comparison failure, respectively. The encoding failure was depicted by the number of cases where the reported parameter was neither the initial nor the changed parameter upon fault appearance, while the comparison failure was where the reported parameter was the initial parameter. For example, the high-temperature cooling water pressure decreased from 2.1 to 1.5 bar in the third monitoring scenario in which participants could report the current pressure from four pressure options: 1.5, 1.8, 2.1 and 2.2 bar once the fault was fully developed. Of the wrong options, 2.1 bar was counted as a comparison failure, and 1.8 bar and 2.2 bar were counted as an encoding failure as either they appeared in the previous trials or did not appear at all.
Results
Objective situation awareness (SAGAT)
The rates of correct responses were calculated for each participant and averaged per situation awareness level and scenario, as shown in . The mean scores were compared between scenarios as they contained two identical system faults appearing in different orders and interfaces. A paired sample t-test revealed that the comprehension score with the type “B” was significantly higher than that of the type “A” display when comparing the third and fourth trials (t(15) = -2.824, p = 0.013). Other scores did not yield significant differences.
Table 2. The comparisons of objective situation awareness between interfaces.
Subjective situation awareness (3D SART)
The 3D SART scores were calculated for each participant and averaged per scenario. The mean scores were compared between scenarios with identical faults, as shown in . A paired sample t-test revealed that the attentional demand scores were significantly higher with the type “A” display than that of the type “B” display in the third and fourth trials (t(15) = 2.798, p = 0.014). Other scores did not yield significant differences.
Table 3. The comparisons of subjective situation awareness between interfaces.
Fault response time
The response time in seconds was calculated for each participant and compared between identical faults, as shown in . A paired sample t-test on each fault type revealed that participants with type “B” interface were significantly faster in noticing F3 (t(15) = 2.219, p = 0.042) and F4 (t(15) = 3.553, p = 0.003). No significant difference was found for F1 and F2.
Table 4. Comparisons of fault response speed by fault and interface types.
Fault detection rate
Each participant’s fault detection rate was calculated and summed by interface type, as shown in . There were generally more correct responses with the type “B” interface regardless of fault types. A McNemar test was performed to investigate whether the proportion of fault detection rates varied following the change in interface types. The findings discovered that the proportions differed significantly on F3 (p = 0.046) and F4 (p = 0.020), while they were insignificant on F1 (p = 0.180) and F2 (p = 0.564).
Table 5. Proportions of fault detection rate by fault and interface types.
Change blindness
The rates of change blindness and two error types were calculated and compared between scenarios with identical faults, as shown in . A Wilcoxon Signed-Rank test indicated that the type “B” interface involved a significantly greater number of encoding errors than the type “A” interface (Z = 2.823, p = 0.005) in the first and second trials. Conversely, the type “A” interface involved a significantly greater number of comparison errors than the type “B” interface (Z = -2.333, p = 0.020) in the first and second trials and a significantly greater rate of change blindness than the type “B” interface (Z = -0.064, p = 0.015) in the third and fourth trials. Another interesting observation is that the number of change blindness did not coincide with the sum of error types except in the first trial. Fewer cases of change blindness in the second trial described that participants could detect the system change, although they did not precisely remember the initial or changed parameters upon the system fault. More cases of change blindness in the third and fourth trials indicated that participants failed to detect the change, albeit they correctly reported the changed parameters.
Table 6. Comparisons of change blindness, encoding and comparison errors between interfaces.
Discussion
This experiment investigated the effects of essential situation awareness information on the situation awareness and fault-detecting performance of engine room remote operators. All subjects conducted four trials with two monitoring interfaces. The type “A” interface presented essential perception elements as default, and the type “B” interface showed all elements regardless of their importance rating in comprising comprehension. The results were analysed between monitoring trials where two identical system faults were introduced in different sequences. When examining the first and second trials, there were no significant differences in subjective and objective situation awareness, fault response speed, and detection rate. This supports the research hypothesis that the presentation of fewer but critical sets of perception elements enables efficient pattern matching in acquiring situation awareness. However, the third and fourth trials indicated that the type “B” interface facilitated significantly better situation awareness (i.g., comprehension and attentional demand), fault response speed and detection rate.
A possible interpretation of such results is that the click-to-open procedure for assessing non-essential situation awareness information with the type “A” interface might have acted as a secondary task whose adverse impact on situation awareness might have outweighed its positive effects. According to the resource depletion hypothesis, a primary drawback of the secondary task is the additional cognitive demand that deteriorates situation awareness, performance and attention deficit (Baumann et al., Citation2007; R. Ma & Kaber, Citation2005; Merat et al., Citation2010; Wulf et al., Citation2014). This is because individuals hold limited information-processing resources, and tasks deplete their mental resources over time, which results in insufficient attention toward the task and a gradual decrease in vigilance (Helton & Russell, Citation2011; Warm et al., Citation2008, Citation2018). Vigilance decrement can be accelerated with additional cognitive load arising from the number of tasks at hand (Helton & Russell, Citation2011) and task demand (Smit et al., Citation2004). In other words, the secondary task may not have a substantial effect if the cognitive load from the primary task is manageable and the summation of cognitive load from both tasks remains within the boundary of the individual’s processing capability. It elucidates why significant differences were observed only between the third and fourth monitoring trials, not between the first and second trials. The fault detection rate and response speed showed that the first and second trials were much easier than the other two, indicating that they involved less cognitive load. With less load from the primary monitoring task, the click-to-open procedure might not compound situation awareness and performance as much as when participants performed the challenging monitoring task, which was the third and fourth scenario in the current experiment.
On the contrary, several studies showed that secondary tasks could mitigate vigilance decrement during monotonic tasks, and their positive effects were a function of task type (Mishler & Chen, Citation2023), task demand (Brüngger et al. Citation2020) and timing of implementation. For instance, participants had fewer misses on vigilance tasks when provided with secondary tasks upon experiencing attention deficits (St John & Risser, Citation2009), and the improvement in performance through the verbal secondary task was found when the driver’s vigilance was the lowest (Atchley & Chan, Citation2011). This indicates that improvement in vigilance in the current research was possibly disrupted as there was a continuous need to perform the secondary task regardless of the current level of vigilance, elevating cognitive demand throughout trials. The higher attentional supply scores with the type “A” interface throughout all trials might be a suggestive of the compromised improvement in vigilance, but a strong interpretation should be cautious as the differences did not meet a statistical significance.
System information quantity is another factor that might have diminished the potential benefit of presenting critical information. With more system components to present, the system becomes more complicated (Endsley, Citation1995). The complicated system overloads the cognitive ability to find, sort, integrate and process the raw data into usable information, increasing mental workload and deteriorating situation awareness (Endsley, Citation2001). In this context, the simpler interface that presents less information at once should alleviate the mental workload and attentional demand, leading to better situation awareness, which was not the case in the current research. During the short discussion sessions after completing the experiments, nine participants mentioned that the available information quantity was adequate to monitor at once, neither too little nor too much. One person indicated information overload, and another mentioned that it was initially overwhelming but soon became adequate. The rest of the participants did not mention anything about it. This describes that efforts to reduce the number of system components shown at once might have shifted their adequate level of mental workload in the lens of information quantity to the lower hand of moderate load or upper hand of underload, known to cause a reduction in alertness and attention (Brookhuis & de Waard, Citation2000) and deteriorate performance (S. Ma et al., Citation2020). The former likely resulted in no substantial improvement in mental workload that outweighed elevated cognitive demand from secondary tasks, while the latter deteriorated situation awareness, compounded by the prolonged secondary tasks.
On top of the additional cognitive load, the click-to-open feature also appears to contribute to attentional tunnelling, that is, allocating attention to a particular piece of information for longer than optimal, leading to failure to acknowledge other information simultaneously presented to the operators (Wickens & Alexander, Citation2009). This was because, first, most participants were highly active in monitoring, leading to the continuous usage of the click-to-open feature, which consequently locked their attention around the mouse cursor area only. This monitoring behaviour was contrary to the researcher’s anticipation that participants would occasionally employ it when changes in default information did not provide clarity. In addition, the click-to-open feature inevitably entailed an extra step to access non-default information, e.g., relocating and clicking the mouse, which increased time spent on a particular information group. However, it should be noted that attentional narrowing did not completely prevent participants from accessing other information as all participants attended to the system fault indicators at least once during the two minutes of the fault development phase. But, they did not acknowledge that the indicators had been changed.
The clear evidence for change blindness is intriguing because participants appeared to be paying more attention to the monitoring tasks while interacting with the mouse. A failure to perceive changes in attended objects shows that attention alone cannot explain the change detection performance (Simons & Rensink, Citation2005). Lamme (Citation2003) distinguished visual attention and awareness, suggesting that not all sensory inputs entered a conscious state that enabled reporting and comparison with previous stimuli. Several studies emphasised the encoding and comparison of original and updated stimuli as key factors of change detection performance in the naturalistic environment (Jensen et al., Citation2011; Simons & Rensink, Citation2005).
The analysis of change blindness and error types elucidates the effects of attentional narrowing under low and high cognitive loads. Under low cognitive load (i.g., first and second trials), encoding error was significantly lower with the type “A” interface as participants could spend a longer time in a single information group. Instead, comparison error was a primary cause of change blindness. On the contrary, participants with the type “B” interface struggled to encode pre-change stimuli but still managed to detect the system change. These results are interesting because encoding pre- and post-change stimuli is traditionally considered a prerequisite to being aware of the discrepancy (Jensen et al., Citation2011). A possible interpretation is that encoding precision was poor due to the large volume of default information on the type “B” interface, but it was sufficient for change detection. This result is in line with other studies that reported a decrease in encoding precision with increasing set sizes (Mazyar et al., Citation2013; Van den Berg et al., Citation2012).
An interesting trend was observed under high cognitive load (i.g., third and fourth trials). While there was no sign of better encoding, there was significantly more change blindness with the type “A’ interface. These findings are counter-intuitive as attentional tunnelling enabled better encoding at the cost of change blindness under low cognitive load. In addition, there were more cases of change blindness than the sum of error types in both interfaces, indicating that participants correctly reported the post-stimuli but failed to report the change. This illustrates an example of visual memory overwritten by post-change stimuli, described as a cause of change blindness (Jensen et al., Citation2011; Rensink et al., Citation1997). The absence of high encoding precision despite attentional tunnelling and the memory overwriting issues in both conditions might be best understood with stress levels. For instance (Vedhara et al., Citation2000), identified that high stress reduces cortisol levels associated with cognitive processes. Similarly, several studies reported its detrimental impacts on information processing (Sandi & Pinelo-Nava, Citation2007) and the scanning speed of short-term memory (Brand et al., Citation2000). These elaborate the current findings regarding encoding precision and memory overwriting, as participants’ stress levels were likely elevated during challenging monitoring tasks.
One limitation of the current research is the discrepancy between participants’ existing mental models and simulation system behaviour, which a short familiarisation session could not fully address. This might have delayed participants in detecting system faults promptly, albeit system faults were designed to be apparent. However, the current research identified cue strengths as a promising design approach in delivering a similar or identical level of situation awareness with less information, therefore mitigating the interface complexity for future shore control centre operations. However, careful consideration is required in selecting the means of access to non-default information that is of low priority or importance, as the navigating tool can induce attentional tunnelling and act as a secondary task that imposes additional cognitive load. On the other hand, information carry-over between multiple ships can be problematic without sufficient attention allocation. Employing physiological measures for concurrent situation awareness, cognitive load, and stress level would help further resolve the intricate relationship between situation awareness and other moderating variables under different display conditions for future research.
Conclusions
The loss of ship sense poses a great challenge in acquiring and maintaining situation awareness at the shore control centre. However, situation awareness appears to be misunderstood as visual and navigational awareness in the maritime industry, albeit situation awareness problems are repeatably reported during system monitoring that does not involve the physical maneuvering of a vehicle. This research examined the two situation awareness support systems, built on situation awareness information requirement and schema instantiation, with sixteen marine engineers through simulation experiments. The type “A” interface presented important perception information as default and required mouse interaction to see the less important information in comprising comprehension. The type “B” interface showed all the information. The study measured the objective and subjective situation awareness, fault detection rate, response speed, frequency of change blindness, and error type. The results partially support that the presentation of fewer but critical sets of perception elements enables efficient pattern matching in acquiring situation awareness, as no significant difference between interfaces was found under less demanding trials. The interface differences in situation awareness and fault-detecting performance under challenging monitoring scenarios were significant due to attentional tunnelling and additional cognitive load while interacting with the type “A” interface. In addition, with more attention allocated to a group of information, participants had better stimuli encoding precision at the expense of change blindness. However, it appears to be negated under challenging monitoring scenarios, likely due to the increased stress levels. The current research suggests the following points in developing the situation awareness support system for the future shore control centre.
In the case of monitoring multiple ships, sufficient time, yet not excessive, needs to be allocated to each set of information to prevent information carry-over and change blindness.
The post-change stimuli must be salient to enable the comparison for change detection if a particular navigating tool is employed to recruit more attention or to resolve monotony.
The situation awareness support system can be further improved by adding flexibility to the interface design to cope with varying ship operating environments. This may include the extent and timing of assistance, considering the current level of situation awareness, cognitive load and stress.
Acknowledgments
We are deeply grateful to all those who contributed to the success of this research project.
Disclosure statement
No potential conflict of interest was reported by the author(s).
References
- AAWA. (2016). Remote and autonomous ships - the next steps. https://www.rolls-royce.com/~/media/Files/R/Rolls-Royce/documents/customers/marine/ship-intel/aawa-whitepaper-210616.pdf
- Allal, A. A., Mansouri, K., Youssfi, M., & Qbadou, M. (2018). Toward energy saving and environmental protection by implementation of autonomous ship. 2018 19th IEEE Mediterranean Electrotechnical Conference (MELECON), Marrakech, Morocco. https://doi.org/10.1109/MELCON.2018.8379089
- An, S. (2013). Schema theory in reading. Theory & Practice in Language Studies, 3(1), 130–11. https://doi.org/10.4304/tpls.3.1.130-134
- Anderson, R. C., Pichert, J. W., Goetz, E. T., Schallert, D. L., Stevens, K. V., & Trollip, S. R. (1976). Instantiation of general terms. Journal of Verbal Learning and Verbal Behavior, 15(6), 667–679. https://doi.org/10.1016/0022-5371(76)90059-1
- Atchley, P., & Chan, M. (2011). Potential benefits and costs of concurrent task engagement to maintain vigilance: A driving simulator investigation. Human Factors: The Journal of the Human Factors & Ergonomics Society, 53(1), 3–12. https://doi.org/10.1177/0018720810391215
- Baumann, M. R., Rösler, D., & Krems, J. F. (2007). Situation awareness and secondary task performance while driving. EPCE 2007: Engineering Psychology and Cognitive Ergonomics: 7th International Conference, Beijing, China. https://doi.org/10.1007/978-3-540-73331-7_27
- Brand, N., Hanson, E., & Godaert, G. (2000). Chronic stress affects blood pressure and speed of short-term memory. Perceptual and Motor Skills, 91(1), 291–298. https://doi.org/10.2466/pms.2000.91.1.291
- Brookhuis, K. A., & de Waard, D. (2000). Assessment of drivers’ workload: Performance and subjective and physiological indexes. In P. A. Hancock & P. A. Desmond (Eds.), Stress, workload, and fatigue (pp. 321–333). CRC press. https://doi.org/10.1201/b12791-2.5
- Brüngger, J., Niederhauser, M., Wirth, M., Peter, J., & Huber, T. (2020). Reducing monotony in rail signaling by secondary tasks with various levels of demand–an experimental study. German Workshop on Rail Human Factors. https://doi.org/10.26041/fhnw-3543
- Burns, C. M., Skraaning, G., Jr., Jamieson, G. A., Lau, N., Kwok, J., Welch, R., & Andresen, G. (2008). Evaluation of ecological interface design for nuclear process control: Situation awareness effects. Human Factors, 50(4), 663–679. https://doi.org/10.1518/001872008X312305
- Dekker, S. W. (2015). The danger of losing situation awareness. Cognition, Technology & Work, 17(2), 159–161. https://doi.org/10.1007/s10111-015-0320-8
- Endsley, M. R. (1988). Design and evaluation for situation awareness enhancement. Proceedings of the Human Factors Society Annual Meeting, 32(2), 97–101. https://doi.org/10.1177/154193128803200221
- Endsley, M. R. (1995). Toward a theory of situation awareness in dynamic systems. Human Factors: The Journal of the Human Factors & Ergonomics Society, 37(1), 32–64. https://doi.org/10.1518/001872095779049543
- Endsley, M. R. (1999). Situation awareness in aviation systems. In D. J. Garland, J. A. Wise, & V. D. Hopkin (Eds.), Handbook of aviation human factors (pp. 257–276). Lawrence Erlbaum Associates Publishers. https://www.pacdeff.com/pdfs/AviationSA-Endsley%201999.pdf
- Endsley, M. R. (2000). Direct measurement of situation awareness: Validity and use of SAGAT. In M. R. Endsley & D. J. Garland (Eds.), Situation awareness analysis and measurement (pp. 147–173). Lawrence Erlbaum Associates Publishers. https://www.researchgate.net/publication/245934995_Direct_Measurement_of_Situation_Awareness_Validity_and_Use_of_SAGAT
- Endsley, M. R. (2001). Designing for situation awareness in complex systems. Proceedings of the Second International Workshop on symbiosis of humans, artifacts and environment, 1–14. https://www.researchgate.net/publication/238653506_Designing_for_situation_awareness_in_complex_system
- Endsley, M. R. (2016). Designing for situation awareness: An approach to user-centered design. CRC press. https://doi.org/10.1201/b11371
- Han, C., Abeysiriwardhane, A., Islam, T., & Chai, S. (2024). Situation awareness for engine room monitoring at future shore control centre. Australian Journal of Maritime and Ocean Affairs, 1–23. https://doi.org/10.1080/18366503.2024.2340168
- Han, C., Abeysiriwardhane, A., Islam, T., & Chai, S. (2024). Situation awareness information requirement for marine engine room monitoring at future shore control centre [manuscript submitted for publication]. Australian Maritime College. University of Tasmania.
- Helton, W. S., & Russell, P. N. (2011). Working memory load and the vigilance decrement. Experimental Brain Research, 212(3), 429–437. https://doi.org/10.1007/s00221-011-2749-1
- IMO. (2021). Autonomous shipping. https://www.imo.org/en/MediaCentre/HotTopics/Pages/Autonomous-shipping.aspx
- Jensen, M. S., Yao, R., Street, W. N., & Simons, D. J. (2011). Change blindness and inattentional blindness. Wiley Interdisciplinary Reviews: Cognitive Science, 2(5), 529–546. https://doi.org/10.1002/wcs.130
- KASS. (2021). What is an autonomous ship? http://kassproject.org/en/info/info.php
- Lamme, V. A. (2003). Why visual attention and awareness are different. Trends in Cognitive Sciences, 7(1), 12–18. https://doi.org/10.1016/s1364-6613(02)00013-x
- MacKinnon, S. N., Man, Y., & Michael, B. (2015). D8.8 final report: Shore control centre. http://www.unmanned-ship.org/munin/wp-content/uploads/2015/09/MUNIN-D8-8-Final-Report-Shore-Control-Centre-CTH-final.pdf
- Ma, R., & Kaber, D. B. (2005). Situation awareness and workload in driving while using adaptive cruise control and a cell phone. International Journal of Industrial Ergonomics, 35(10), 939–953. https://doi.org/10.1016/j.ergon.2005.04.002
- Ma, S., Zhang, W., Yang, Z., Kang, C., Wu, C., Chai, C., Shi, J., & Li, H. (2020). Promote or inhibit: An inverted U-shaped effect of workload on driver takeover performance. Traffic Injury Prevention, 21(7), 482–487. https://doi.org/10.1080/15389588.2020.1804060
- Mazyar, H., Van den Berg, R., Seilheimer, R. L., & Ma, W. J. (2013). Independence is elusive: Set size effects on encoding precision in visual search. Journal of Vision, 13(5), 8. https://doi.org/10.1167/13.5.8
- Merat, N., Jamson, H., Lai, F., & Carsten, O. (2010). Automated driving, secondary task performance and situation awareness. Human factors: A system view of human, technology, and organisation, 41–53. https://www.researchgate.net/publication/285976484_Automated_driving_secondary_task_performance_and_situation_awareness
- Mishler, S., & Chen, J. (2023). Boring but demanding: Using secondary tasks to counter the driver vigilance decrement for partially automated driving. Human Factors, 66(6), 1798–1811. https://doi.org/10.1177/00187208231168697
- Mutzenich, C., Durant, S., Helman, S., & Dalton, P. (2021). Situation awareness in remote operators of autonomous vehicles: Developing a taxonomy of situation awareness in video-relays of driving scenes. Frontiers in Psychology, 12, 727500. https://doi.org/10.3389/fpsyg.2021.727500
- NYKLINE. (2020). NYK to participate in crewless maritime autonomous surface ship trial project. https://www.nyk.com/english/news/2020/20200615_01.html
- Patrick, J., James, N., & Ahmed, A. (2007). Awareness of control room teams. Le Travail Humain: A Bilingual and Multi-Disciplinary Journal in Human Factors, 70(1), 67–94. https://doi.org/10.3917/th.701.0067
- Porathe, T., Prison, J., & Man, Y. (2014). Situation awareness in remote control centres for unmanned ships. Human Factors in Ship Design & Operation. https://doi.org/10.3940/rina.hf.2014.12
- Rensink, R. A., O’regan, J. K., & Clark, J. J. (1997). To see or not to see: The need for attention to perceive changes in scenes. Psychological Science, 8(5), 368–373. https://doi.org/10.1111/j.1467-9280.1997.tb00427.x
- Sandi, C., & Pinelo-Nava, M. T. (2007). Stress and memory: Behavioral effects and neurobiological mechanisms. Neural Plasticity, 2007, 1–20. https://doi.org/10.1155/2007/78970
- Shenoi, R. A., Bowker, J. A., Dzielendziak, A., Lidtke, S., Konrad, A., Zhu, G., Cheng, F., Argyos, D., Fang, I., Gonzalez, J., Johnson, S., Ross, K., Kennedy, I., O’Dell, M., & Westgarth, R. (2015). Global marine technology trends 2030. http://eprints.soton.ac.uk/id/eprint/388628
- Simons, D. J., & Rensink, R. A. (2005). Change blindness: Past, present, and future. Trends in Cognitive Sciences, 9(1), 16–20. https://doi.org/10.1016/j.tics.2004.11.006
- Smit, A. S., Eling, P. A., & Coenen, A. M. (2004). Mental effort causes vigilance decrease due to resource depletion. Acta Psychologica, 115(1), 35–42. https://doi.org/10.1016/j.actpsy.2003.11.001
- Solberg, E., Nystad, E., & McDonald, R. (2023). Situation awareness in outage work–a study of events occurring in US nuclear power plants between 2016 and 2020. Safety Science, 158, 105965. https://doi.org/10.1016/j.ssci.2022.105965
- St. John, M., & Risser, M. R. (2009). Sustaining vigilance by activating a secondary task when inattention is detected. Proceedings of the Human Factors and Ergonomics Society Annual Meeting, 53(3), 155–159. https://doi.org/10.1177/154193120905300304
- Van den Berg, R., Shin, H., Chou, W.-C., George, R., & Ma, W. J. (2012). Variability in encoding precision accounts for visual short-term memory limitations. Proceedings of the National Academy of Sciences, 109(22), 8780–8785. https://doi.org/10.1073/pnas.1117465109
- Vedhara, K., Hyde, J., Gilchrist, I., Tytherleigh, M., & Plummer, S. (2000). Acute stress, memory, attention and cortisol. Psychoneuroendocrinology, 25(6), 535–549. https://doi.org/10.1016/s0306-4530(00)00008-1
- Warm, J. S., Dember, W. N., & Hancock, P. A. (2018). Vigilance and workload in automated systems. In R. Parasuraman & M. Mustapha (Eds.), Automation and human performance (pp. 183–200). CRC Press.
- Warm, J. S., Parasuraman, R., & Matthews, G. (2008). Vigilance requires hard mental work and is stressful. Human Factors: The Journal of the Human Factors & Ergonomics Society, 50(3), 433–441. https://doi.org/10.1518/001872008X312152
- Wickens, C. D., & Alexander, A. L. (2009). Attentional tunneling and task management in synthetic vision displays. The International Journal of Aviation Psychology, 19(2), 182–199. https://doi.org/10.1080/10508410902766549
- Wulf, F., Rimini-Döring, M., Arnon, M., & Gauterin, F. (2014). Recommendations supporting situation awareness in partially automated driver assistance systems. IEEE Transactions on Intelligent Transportation Systems, 16(4), 2290–2296. https://doi.org/10.1109/TITS.2014.2376572
- Yoshida, M., Shimizu, E., Sugomori, M., & Umeda, A. (2020). Regulatory requirements on the competence of remote operator in maritime autonomous surface ship: Situation awareness, ship sense and goal-based gap analysis. Applied Sciences, 10(23), 8751. https://doi.org/10.3390/app10238751