

Abstract
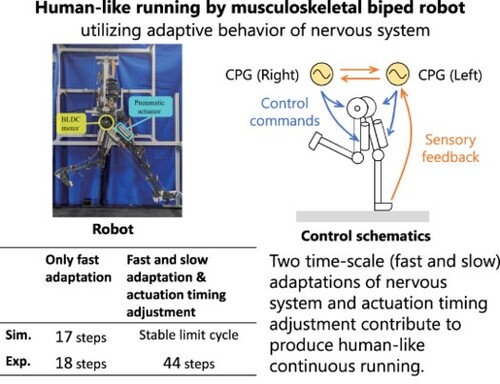
We have been developing human-sized biped robots based on passive dynamic mechanisms. In human locomotion, the muscles activate at the same rate relative to the gait cycle during running. To achieve adaptive running for robots, such characteristics should be reproduced to yield the desired effect, In this study, we designed a central pattern generator (CPG) involving fast and slow adaptation to achieve human-like running using a simple spring-mass model and our developed bipedal robot, which is equipped with actuators that imitate the human musculoskeletal system. Our results demonstrate that the CPG-based controller with fast and slow adaptations, and an adjustable actuator control timing can reproduce human-like running. The results suggest that the CPG contributes to the adjustment of the muscle activation timing in human running.
GRAPHICAL ABSTRACT
Disclosure statement
No potential conflict of interest was reported by the author(s).
Additional information
Funding
Notes on contributors
Yusuke Sakurai
Yusuke Sakurai received his B.E. and M.E. degrees from Nagoya Institute of Technology, Aichi, Japan, in 2022 and 2024, respectively. His research interests include CPG-based control and reinforcement learning of bipedal robots.
Tomoya Kamimura
Tomoya Kamimura received the B.S., M. S., and Ph. D. (Eng.) degrees from Kyoto University, Kyoto, Japan in 2014, 2016, and 2020, respectively. He is currently an Assistant Professor with the Department of Electrical and Mechanical Engineering, Nagoya Institute of Technology, Nagoya, Japan. His research interests include quadruped locomotion, biped locomotion, passive walking and running, and legged robots. He is a member of IEEE, the Society of Instruments and Control Engineers, and Robotics Society of Japan.
Yuki Sakamoto
Yuki Sakamoto received his B.E. and M.E. degrees from Nagoya Institute of Technology, Aichi, Japan, in 2020 and 2022, respectively. His research interests include dynamical mechanisms of bipedal walking, especially focusing on leg and foot structure.
Shohei Nishii
Shohei Nishii received his B.E. and M.E. degrees from Nagoya Institute of Technology, Aichi, Japan, in 2022 and 2024, respectively. His research interests include controls that allow the robot to walk and run in a single body.
Kodai Sato
Kodai Sato received his B.E. and M.E. degrees from Nagoya Institute of Technology, Aichi, Japan, in 2021 and 2023, respectively. His research interests include designing whole body structure of a humanoid robot and its running in open environment.
Yuta Fujiwara
Yuta Fujiwara received his B.E. and M.E. degrees from Nagoya Institute of Technology, Aichi, Japan, in 2021 and 2023, respectively. His research interests include designing musculoskeletal bipedal robot and its running.
Akihito Sano
Akihito Sano received the B.S. and M.S. degrees in precision engineering from Gifu University, Gifu, Japan, in 1985 and 1987, respectively, and the Ph.D. (Eng.) degree from Nagoya University, Nagoya, Japan, in 1992. He is currently a Professor with the Department of Electrical and Mechanical Engineering, Nagoya Institute of Technology, Nagoya, Japan. His research interests include biped locomotion, passive walking and running, humanoid, and non-powered assist suit. Dr. Sano is a Fellow of the Japan Society of Mechanical Engineers and the Robotics Society of Japan. He was a Director of the Robotics Society of Japan, in 2010-2011. He received the Best Paper Award of the Robotics Society of Japan, in 2014.