

Abstract
This paper presents a new kind of climbing robots called EJBot, which has not been restricted to climb certain surface materials or terrains. EJBot is inspired by propeller-based aviation systems, however, its adhesion principle is opposite to flight concept. Thanks to the hybrid actuation system embedded in this robot which gives a good and stable adhesion. This hybrid system consists of propeller thrust forces and wheel torques actuated simultaneously to generate the proper adhesion force. It is similar to a car climbing a ramp, it needs both weight of the car and the wheels' torques. Without these torques, the car will roll down. Consequently, the thrust forces of the propellers increase the traction force capacity, then the wheels' role arises to generate the convenient torques for stopping the robot or navigating it on the structures. The feasibility of this adhesion concept is verified by the first and second modules of EJBot as presented in the simulation and practical results.
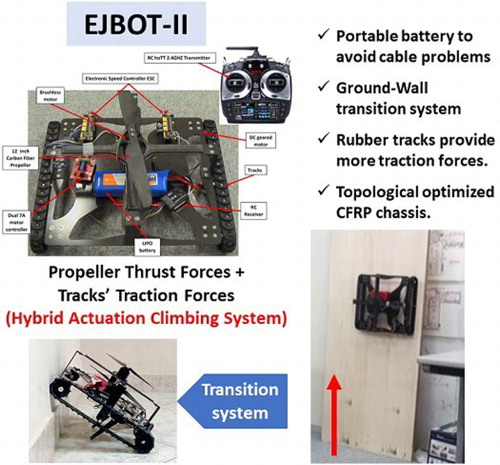
GRAPHICAL ABSTRACT
Acknowledgments
Thanks go to Nikki Fron Company at Tokyo for their support in fabricating CFRP frame of EJBot-II. The authors are so grateful to Prof. Krister Svanberg from the Royal Institute of Technology, Stockholm for providing us with his MMA Matlab code.
Disclosure statement
No potential conflict of interest was reported by the authors.
ORCID
Mohamed G. Alkalla http://orcid.org/0000-0001-5264-3292
Additional information
Funding
Notes on contributors
Mohamed G. Alkalla
Mohamed G. Alkalla has received his B.E. and M.Sc. degrees in Mechanical Design Engineering from Production Engineering and Mechanical Design Department, Faculty of Engineering, Mansoura University, Egypt, in 2007 and 2013, respectively. He was a visiting research fellow at SHALAB Laboratory, Department of Applied Physics, Waseda University, Tokyo, Japan in 2016. He has received his Ph.D. in Mechatronics and Robotics Engineering at Egypt-Japan University of Science and Technology (E-JUST), Alexandria, Egypt in 2017. He is Assistant Professor at Production Engineering and Mechanical Design Department, Faculty of Engineering, Mansoura University, Egypt, since 2017. He is currently workings as a Research Fellow at Surrey Space Centre, University of Surrey, UK with a FAIR-SPACE Hub team on Artificial Intelligent Robotic Systems for Space. His major research interests include robotics, mechanical design, mechatronic systems, and structural optimization. The recent publications focused on climbing robots, topology optimization, and extraterrestrial drilling systems.
Mohamed A. Fanni
Mohamed Fanni has received his B.E. and M.Sc. degrees in Mechanical Engineering from Faculty of Engineering of both Cairo University and Mansoura University, Egypt, in 1981 and 1986, respectively. He has received the Ph.D. degree in Engineering from Karlsruhe University, Germany, 1993. He currently occupies a Professor position in the Department of Mechatronics and Robotics Engineering, at Egypt-Japan University of Science and Technology (E-JUST), Alexandria, on leave from Production Engineering and Mechanical Design Department, Faculty of Engineering, Mansoura University, Egypt. His major research interests include robotics engineering, automatic control, and Mechanical Design. His current researches focus on Design and Control of Mechatronic Systems, Surgical Manipulators, Industrial Robots and Flying/Walking Robots.
Abdel− Fattah Mohamed
Abdelfatah M. Mohamed: Has received the Ph.D degree from University of Maryland, College park, USA in 1990. Since 1990 he has been an Assistant Professor at the Dept. of Electrical Engineering, Assiut University. He became an Associate Professor in 1995, and Professor in 2000. From September 1990 to August 1993, He has been a Postdoctoral Fellow at the Dept. of Mechanical Engineering, University of Texas at Austin USA. From April 1996 to April 1997, He has been a visiting Professor at the Dept. of Electrical Engineering, Kanazawa University, Japan. From September 2010 to March 2012 He has been the Head, Dept. of Electrical Engineering, Assiut University, Egypt. From April, 2012 to September 2013 He has been the Dean of Faculty of Engineering, Assiut University, Egypt. From November 2013 to September 2018, he has been the head of the Dept. of Mechatronics and Robotics Engineering, Egypt-Japan University of Science & Technology. Currently, he is a Professor at the Dept. of Mechatronics and Robotics Engineering, Egypt-Japan University of Science & Technology. His research interest lies in Robust and Intelligent control of Magnetic Bearing, Magnetic Levitation systems, Robotics, Industrial drives and Power systems. Dr. Mohamed is a senior IEEE member. Google scholar h-index = 13.
Shuji Hashimoto
Shuji Hashimoto, Dr. Eng. (Member, IEEE) received the B.S., M.S. and Dr. Eng. degrees in Applied Physics from Waseda University, Tokyo, Japan, in 1970, 1973 and 1977, respectively. He is currently a Emeritus Professor in the Department of Applied Physics, School of Science and Engineering, Waseda University. Since 2000, he has been a director of the Humanoid Robotics Institute, Waseda University. From 1979 to 1991, he was with the Faculty of Science, Toho University, Funabashi. He was a Vice President of International Computer Music Association until 2001. He is the author of over 200 technical publications, proceedings, editorials and books. He is a reviewer for many journals and conferences on computer music, computer vision, robotics and neural computing. His research interests are in human communication and Kansei information processing including image processing, music systems, neural computing and humanoid robotics. From 2003, he serves as chair of the promotion committee, IEEE Tokyo Section. Membership of professional institutions: IEEE, ICMA (International Computer Music Association), IEICE (Institute of Electronics, Information and Communication Engineers), IPSJ(Information Processing Society of Japan), SICE(The Society of Instrument and Control Engineers), ISCIE, I.I.E.E.J (Institute of Image Electronics Engineers of Japan), RSJ (The Robotics Society of Japan), Human Interface Society of Japan, and Virtual Reality Society of Japan.
Hideyuki Sawada
Hideyuki Sawada is a Professor in the Department of Applied Physics, Faculty of Science and Engineering, Waseda University. He received the B.E., M.E. and Ph.D. degrees in Applied Physics from Waseda University in 1990, 1992 and 1999, respectively. In 1999, he joined the Department of Intelligent Mechanical Systems Engineering, Faculty of Engineering, Kagawa University, as an Associate Professor, and became a Professor in 2010. His current research interests include robotics, sound and image processing, machine learning, human interfaces, and tactile sensing and display.
Takanobu Miwa
Takanobu Miwa has received his Ph.D in engineering from Waseda University, Tokyo, Japan, in 2017. He has been a research associate at the Faculty of Science and Engineering, Waseda University from April 2015 to March 2018. Currently, he is working as a science teacher at Chuo University Junior and Senior High School which is designated as a Super Science High School by the Ministry of Education, Culture, Sports, Science and Technology (MEXT). His research interests include scientific visualiazation, human-computer interaction, robotics, and physics education.
Amr Hamed
Amr Hamed received the B.S. degree in Electronics and Communication Engineering and M.Sc. degree in Electronics Engineering from Benha University, Egypt, in 2011 and 2015, respectively. He is currently pursuing the Ph.D. degree in Mechatronics and Robotics Engineering at Egypt-Japan University of Science and Technology.