Figures & data
Table 1. The comparison study presented in Sections 4 and 5 of this paper shows that optimal accuracy is not achieved with the existing approaches in van der Meulen et al. (Citation2008) and Boeren, Oomen, et al. (Citation2015) while the proposed approach can achieve optimal accuracy upon convergence of the proposed RIV algorithm.
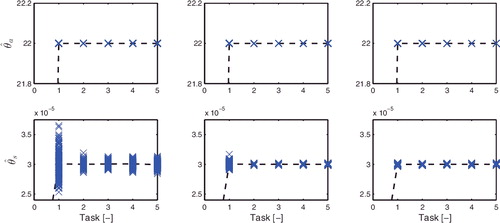
Table 2. Summary of results of Monte Carlo simulation. The mean value of  and in task j = 1 for zp, <i >(t), z1(t) and z2(t) confirm that unbiased parameter estimates are obtained for all methods, while the standard deviation of and confirms that an enhanced accuracy is obtained with the proposed approach zp, <i >(t) compared to z1(t) and z2(t).
and in task j = 1 for zp, <i >(t), z1(t) and z2(t) confirm that unbiased parameter estimates are obtained for all methods, while the standard deviation of and confirms that an enhanced accuracy is obtained with the proposed approach zp, <i >(t) compared to z1(t) and z2(t).