Figures & data
Figure 1. The surgical grasper (a) CAD model, (b) prototype.
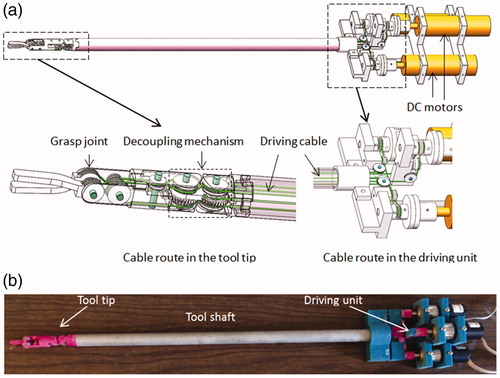
Figure 2. Comparison between force estimation and force measurement on grasp DOF.
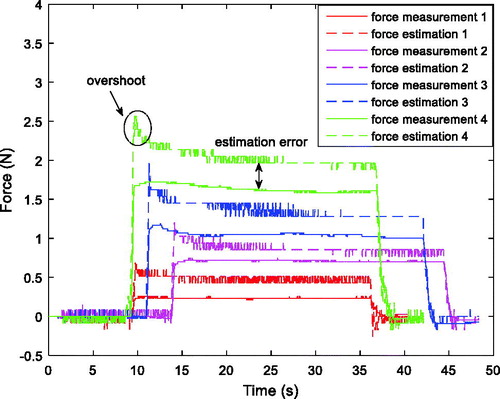
Figure 3. Force-reflecting robot prototype, (a) overall view, (b) cable-capstan transmission, (c) decoupling mechanism.
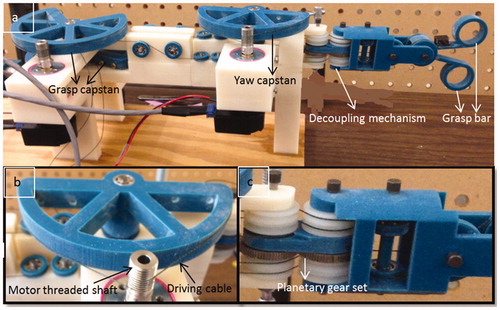
Figure 4. Master-slave teleoperation system.
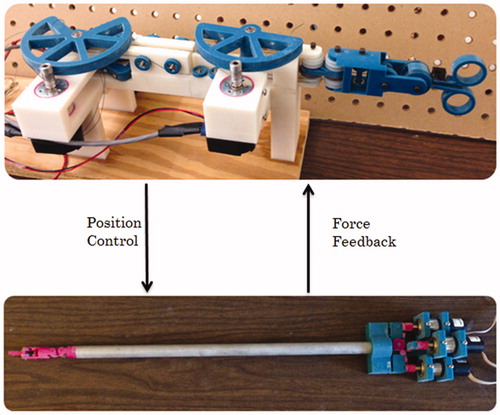
Figure 5. Block diagram of a 2-channel position-force bilateral teleoperation system.
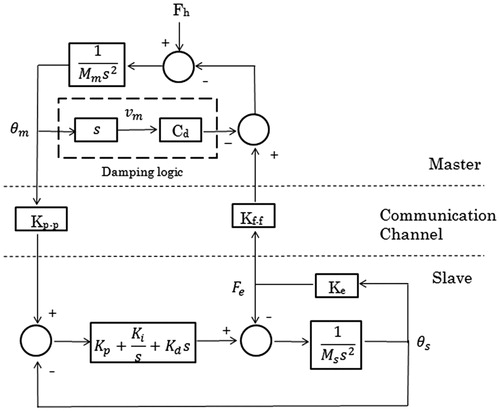
Table 1. Specification of the block diagram given in .
Figure 6. Contact instability.
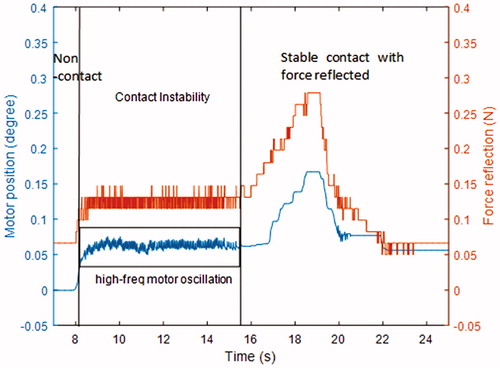
Figure 7. Performance of master robot after adding damping logic.
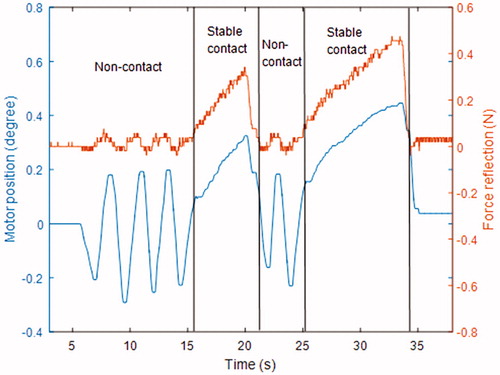
Figure 8. Experiment setup for stiffness differentiation on (a) grasp DOF, (b) pitch DOF, (c) yaw DOF.
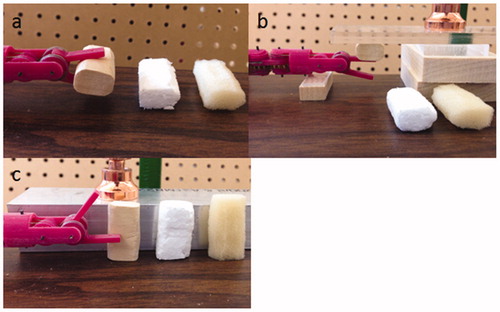
Table 2. Stiffness differentiation result.
Figure 9. The porcine liver with tumor phantom embedded.
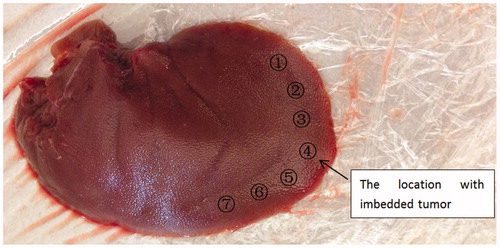
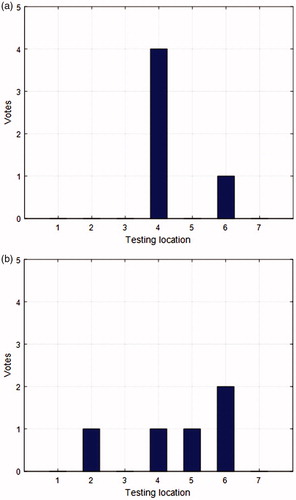
Figure 10. Tumor detection result with (a) force feedback, (b) visual feedback.