
 ?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.
?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.ABSTRACT
Feedforward control enables high performance of a motion system. Recently, algorithms have been proposed that eliminate bias errors in tuning the parameters of a feedforward controller. The aim of this paper is to develop a new algorithm that combines unbiased parameter estimates with optimal accuracy in terms of variance. A simulation study is presented to illustrate the poor accuracy properties of pre-existing algorithms compared to the proposed approach. Experimental results obtained on an industrial nanopositioning system confirm the practical relevance of the proposed method.
1. Introduction
Challenging requirements on positioning accuracy often necessitate the use of feedforward control for motion systems, since feedforward can effectively compensate for the error induced by known, repeating disturbances. Examples include atomic force microscopes (Butterworth, Pao, & Abramovitch, Citation2012; Clayton, Tien, Leang, Zou, & Devasia, Citation2009; Kara-Mohamed, Heath, & Lanzon, Citation2015), robotics (Khalil & Dombre, Citation2002, Chapter 14) and wafer scanners (Mishra, Coaplen, & Tomizuka, Citation2007; Oomen et al., Citation2014; van der Meulen, Tousain, & Bosgra, Citation2008). Traditional approaches that can potentially achieve these requirements on positioning accuracy include iterative learning control (ILC) (Bristow, Tharayil, & Alleyne, Citation2006; Gorinevsky, Citation2002) and model-based feedforward (Butterworth et al., Citation2012; Zhong, Pao, & de Callafon, Citation2012).
ILC algorithms update the feedforward signal by learning from previous tasks under the assumption that the task is repetitive. ILC consequently enables superior performance with respect to model-based feedforward for a specific task by compensating for all repetitive disturbances. However, changes in the reference signal typically result in significant performance deterioration (see, e.g. Hoelzle, Johnson, & Alleyne, Citation2014). Motion systems are typically confronted with similar yet slightly different reference signals (Lambrechts, Boerlage, & Steinbuch, Citation2005; Oomen et al., Citation2014). In contrast to ILC, model-based feedforward results in moderate performance for a class of reference signals instead of only one specific reference (Butterworth et al., Citation2012). Note that the performance for model-based feedforward is highly dependent on the model quality of the parametric model of the system and the accuracy of model-inversion (Devasia, Citation2002).
By introducing basis functions in ILC, the advantages of model-based feedforward and ILC are combined in van de Wijdeven and Bosgra (Citation2010). This approach is further improved in van der Meulen et al. (Citation2008), where the need for an approximate model of the system, as is common in ILC, is eliminated by exploiting results from iterative feedback tuning (Bazanella, Campestrini, & Eckhard, Citation2012). The iterative feedforward control approach in van der Meulen et al. (Citation2008) is extended to multivariable systems and input shaping in Heertjes, Hennekens, and Steinbuch (Citation2010) and Boeren, Bruijnen, van Dijk, and Oomen (Citation2014), respectively. However, in Boeren, Oomen, and Steinbuch (Citation2015), it is shown that the least-squares algorithm used in van der Meulen et al. (Citation2008) can lead to a bias error in the estimated parameters. A new algorithm is proposed in Boeren, Oomen, et al. (Citation2015) based on instrumental variable (IV) techniques that results in unbiased parameter estimates. However, accuracy in terms of variance of the estimate has not yet been investigated.
Although iterative feedforward control based on instrumental variables is promising for motion control, existing approaches suffer from poor accuracy properties in terms of variance. This severely limits the practical applicability of existing approaches in case of noisy signals. This paper aims to reveal non-optimal accuracy for the approaches in Boeren, Oomen, et al. (Citation2015) and van der Meulen et al. (Citation2008), and develop an algorithm that leads to optimal accuracy in the presence of noise.
The contributions of this paper are fourfold. First, an analysis is provided to show that the approaches in Boeren, Oomen, et al. (Citation2015) and van der Meulen et al. (Citation2008) lead to poor accuracy in terms of variance. Therefore, variance results developed in open-loop identification (Söderström & Stoica, Citation1983, Chapters 5 and 6) and closed-loop identification (Forssell, Citation1999; Gilson & Van den Hof, Citation2005) are extended towards iterative feedforward control. As a second contribution, this insight in the accuracy aspects is exploited to develop an algorithm that achieves optimal accuracy. The proposed algorithm (1) exploits an iterative refined instrumental variable (RIV) method that is similar to the approaches presented in Young (Citation1976, Citation2015), Young and Jakeman (Citation1979), Jakeman and Young (Citation1979), and Young and Jakeman (Citation1980), and (2) is closely connected to the estimation of inverse systems (see, e.g. Jung & Enqvist, Citation2013). Third, a simulation study is presented to (1) illustrate that the proposed algorithm leads to enhanced accuracy properties compared to pre-existing approaches and (2) confirm the significance of the accuracy of parameter estimates on the achievable performance. As a final contribution, experimental results confirm the practical relevance of the proposed algorithm. This paper significantly extends earlier results reported in Boeren, Bruijnen, and Oomen (Citation2014) and Boeren, Oomen, and Steinbuch (Citation2014) by thorough proofs and extended experimental results. Related data-driven tuning algorithms are available in Formentin, van Heusden, and Karimi (Citation2013b), Karimi, Butcher, and Longchamp (Citation2008), and Kim and Zou (Citation2013). Furthermore, instrumental variable approaches are often used for estimating the parameters of industrial robots (see, e.g. Janot, Vandanjon, & Gautier, Citation2014a, Citation2014b; Puthenpura & Sinha, Citation1986; Yoshida, Ikeda, & Mayeda, Citation1992).
This paper is organised as follows. In Section 2, the problem formulation is outlined. In Section 3, asymptotic expressions for optimal accuracy are developed for feedforward control. To provide a concise presentation of the contributions of this paper, the second contribution is presented before the first contribution is explained. That is, a new tuning algorithm for iterative feedforward control is proposed in Section 4. Then, in Section 5, the accuracy properties of existing approaches are analysed. In Section 6, a simulation study of a motion system is presented to compare the proposed and pre-existing approaches. In Section 7, the theoretical results are confirmed by experiments on an industrial nanopositioning system. Finally, conclusions are drawn in Section 8.
Notation:
The variable q denotes the forward shift operator qu(t) = u(t + 1). For a vector x, ||x||2W = xTWx. A positive-definite matrix A is denoted as A ≻ 0. Also, A − B ≻ 0 is denoted as A ≻ B. A positive-semidefinite matrix A is denoted as A ⪰ 0. Let denotes the real polynomials in q. Also,
with probability density function f (x),
where N is the number of samples.
2. Problem definition
2.1 Problem setup
Consider the two degree-of-freedom control configuration as depicted in . The true unknown system P(q) is assumed to be discrete-time, single-input single-output, and linear time-invariant, with rational representation
where
. The control configuration consists of a given stabilising feedback controller Cfb(q), and a feedforward controller Cjff(q). The index j denotes the jth task in a sequence of finite time tasks of length N samples, where j = 0, 1, ..., M. Furthermore, Ts denotes the sampling time.
Let r denote the reference signal. Typically, r is designed as a known nth-order multi-segment polynomial trajectory with constraints on the first n derivatives, as in, e.g. Biagiotti and Melchiorri (Citation2012) and Lambrechts et al. (Citation2005). Also, wj(t) = H(q)εj(t) denotes an unknown disturbance, where H(q) is a monic, asymptotically stable, proper system, and {εj(t)} is normally distributed white noise with zero mean and variance λ2ϵ. Hence, wj and r are uncorrelated. The feedforward signal is denoted by ujff, while the measured signals ejm and yjm in the jth task are given by
(1)
(1)
with
(2)
(2)
and sensitivity function S(q) = (1 + P(q)Cfb(q))−1. Since P(q) is assumed to be unknown and wj is an unknown disturbance, it is not possible to determine ejr and ejw (resp. yjr and yjw) based on the measured signal ejm (resp. yjm).
2.2 Iterative feedforward: batch-wise tuning
In iterative feedforward control, the measured signals ejm(t) and yjm(t), for t = 1, ..., N, are stored. Hence, the data set that is used for the estimation of the feedforward controller is given by
After the jth task is finished, this batch of measured data is used to perform an offline update of the existing feedforward controller Cjff(q), i.e.
before initiating the (j + 1)th task.
To establish the main ideas in this paper and provide a fair comparison, the feedforward controller Cj + 1ff(q) is parametrised similar to Lambrechts et al. (Citation2005), van der Meulen et al. (Citation2008), Heertjes et al. (Citation2010), and Boeren, Bruijnen, van Dijk, et al. (Citation2014) as
(3)
(3)
where
, and ψi(q−1) are basis functions. The update CΔff(q, θΔ) is given by
(4)
(4)
with parameters
and polynomial basis functions
To illustrate a typical selection of the parameter vector
and basis functions Ψ(q), consider the following example that is aimed at feedforward control for motion systems.
Example 2.1:
Let Cjff(q) = 0, i.e. only a feedback controller Cfb(q) is used in task j, and let r(t) be a fourth-order reference trajectory. A typical parametrisation of is given by
(5)
(5)
with basis functions
parameters θj = [θja, θsj]T, and sampling time Ts. The parametrisation in (Equation5
(5)
(5) ) consists of acceleration feedforward with acceleration a(t) = ψa(q−1)r(t), i.e., the second derivative of r(t), and snap feedforward with snap s(t) = ψs(q−1)r(t), i.e. the fourth derivative of r(t). Furthermore, θa denotes the mass of the system, while θs denotes the snap parameter. As such, CΔff(q, θΔ) in (Equation5
(5)
(5) ) can compensate for the dominant component of the reference-induced error (see, e.g. Lambrechts et al., Citation2005). Note that double (and fourth) differentiation is possible since r(t) is a deterministic and known signal. The corresponding feedforward signal uff(t) is given by
The approach proposed in this paper aims to estimate the parameters θa and θs based on measured data.
The use of feedforward is a standard approach to obtain a small error signal ejm(t) when tracking a reference trajectory r(t) (see, e.g. Steinbuch & Norg, Citation1998). By subdividing ejm(t) into ejr(t) and ejw(t), as defined in (Equation2(2)
(2) ), it is immediately clear that Cj + 1ff(q, θj + 1) has no influence on ejw(t). Indeed, the goal of feedforward control is to determine a Cj + 1ff(q, θj + 1) that minimises the reference-induced error ej + 1r(t, θj + 1) for t = 1, ..., N in a suitable sense. Given the definition of Cj + 1ff(q, θj + 1) in (Equation3
(3)
(3) ), the aim of this paper is to determine θj + 1 such that ej + 1r(t, θj + 1) is as small as possible. It directly follows from (Equation2
(2)
(2) ) that
(6)
(6)
and ej + 1r(t, θj + 1) = 0 for all t if Cj + 1ff(q, θj + 1) = P− 1(q). However, since P(q) is assumed to be unknown, it is not possible to determine either P−1(q), or determine ej + 1r(t, θj + 1) before initiating the (j + 1)th task. Instead, the measured signal ejm(t) in the jth task, contaminated by wj(t), is used in an optimisation problem to determine Cj + 1ff(q, θj + 1). That is, the aim in iterative feedforward control is to determine the parameters
in (Equation4
(4)
(4) ), before starting the (j + 1)th task, from the optimisation problem
(7)
(7)
where the criterion V(θΔ) is based on the stored signals ejm(t) and yjm(t) for t = 1, ..., N, as measured in the jth task. Then, Cj + 1ff(q, θj + 1) is determined according to (Equation3
(3)
(3) ). Next, two assumptions are introduced.
Assumption 2.1:
Cfb(q) is designed such that S(q)H(q) = 1, where the noise model is parametrised as
Assumption 2.2:
The true unknown system is given by
Concerning Assumption 2.1, recall from (Equation6(6)
(6) ) that Cjff(q, θj) aims to minimise ejr(t), i.e. the error induced by the known r(t). In the optimal case, it holds that ejr(t) = 0 for all t. In contrast, the main goal of the feedback controller Cfb(q) is to compensate for wj(t) in view of minimising ejw(t). These disturbances are assumed to be stochastic with a certain spectrum. Typically, the dominant disturbances are in the low-frequency range, e.g. due to amplifier noise (Fleming, Citation2014), cable slab, commutation errors, or immersion water-flow in lithographic applications. Then, Cfb(q) is designed to compensate for these disturbances, in which case the optimal result is ejw(t) = ϵj(t), i.e. the error signal being white noise. Clearly, this corresponds to S(q)H(q) = 1. Similar approximations are used in the identification of robotics (see, e.g. Janot, Gautier, Jubien, & Vandanjon (Citation2014)). Assumption 2.1 can be achieved by, e.g. using traditional PID tuning, possibly with error-based retuning (van de Wal, van Baars, & Sperling, Citation2000), and common LQG control designs (Åström, Citation1970, Section 6.2). In a typical approach to design Cfb(q) such that S(q)H(q) = 1, ejm(t) is measured in an experiment where r(t) = 0 for all t. For this case, ejr(t) = 0 for all t, and consequently ejm(t) = ewj(t). Then, Cfb(q) is tuned until ejm(t) = ϵj(t), i.e. ejm(t) being white noise.
Concerning Assumption 2.2, the assumption that P(q) = 1/A0(q) implies that there is a θj + 1 such that Cj + 1ff(q, θj + 1) = P− 1(q). This result immediately follows by observing that P−1(q) = A0(q) and Cj + 1ff(q, θj + 1) is restricted to a polynomial parametrisation as in (Equation3(3)
(3) ). This assumption may appear as a stringent requirement on P(q). However, for a general class of motion systems as described in Lambrechts et al. (Citation2005), the reference signal r(t) has a dominant low-frequency signal content, and P−1(q) can be accurately described by an acceleration-dependent and snap-dependent term (Boerlage, Tousain, & Steinbuch, Citation2004). That is, high-frequency dynamic aspects are concealed by the specific input design of r(t) (see also Hjalmarsson (Citation2009) for a further explanation of this aspect). These results will be corroborated by the simulation example in Section 6 and the experimental results in Section 7, where it is shown that the reference-induced contribution to the error signal can be almost completely compensated for by using Cj + 1ff(q, θj + 1) as in (Equation3
(3)
(3) ) of low degree. The proposed approach can be extended by allowing a more general parametrisation for Cj + 1ff(q, θj + 1), as in, e.g. Boeren, Blanken, Bruijnen, and Oomen (Citation2015) and Boeren, Bruijnen, van Dijk, et al. (Citation2014) if a reference is needed with a significant high-frequency signal content.
Throughout, measured data from a single task is used to determine according to (Equation7
(7)
(7) ). This approach is pursued since it can effectively handle slow variations that are typically present in a motion system, for example, wear, by means of continuous adaptation of the feedforward parameters. Note that the presented approach can be directly extended to exploit data from multiple tasks (e.g. as in Gunnarsson and Norrlöf (Citation2001, Citation2006) and Kushner and Yin (Citation2003)).
3. Optimal feedforward based on instrumental variables
3.1 Iterative feedforward control
Based on the known r(t) and measured ejm(t) and yjm(t) in task j, the predicted error in task j + 1 can be determined as (see ):
(8)
(8)
In the proposed iterative feedforward control approach, the parameters θΔ should be estimated directly from measured data as is done in Hjalmarsson, Gevers, Gunnarsson, and Lequin (Citation1998), i.e. without estimating a model of P(q). As such, (Equation8
(8)
(8) ) cannot be directly used to determine θΔ. Instead, the following estimate of
is used
(9)
(9)
where C = (Cfb(q) + Cjff(q)). To show that (Equation9
(9)
(9) ) is a suitable estimate of (Equation8
(8)
(8) ), note that the commutative property of SISO systems enables rewriting yjm(t) in (Equation1
(1)
(1) ) as yjm(t) = (Cfb(q) + Cjff(q))S(q)P(q)r(t) + S(q)wj(t). Rearranging terms leads to
(10)
(10)
Clearly,
if wj(t) is equal to zero. Moreover, by taking the expectation of (Equation10
(10)
(10) ), it follows that
(11)
(11)
By noting that r(t) is deterministic, it follows that
. Furthermore, for wj(t) as defined in Section 2.1, it is immediately clear that
(see, e.g. Söderström, Citation2002, Lemma 4.1). By combining these results, (Equation11
(11)
(11) ) implies that (Equation10
(10)
(10) ) is an unbiased estimator of S(q)P(q)r(t).
In the remainder of this paper, (Equation9(9)
(9) ) is used as the predicted error in task j + 1. Substituting the parametrisation defined in (Equation4
(4)
(4) ) into (Equation9
(9)
(9) ) and rearranging terms leads to the following estimation equation:
(12)
(12)
where
(13)
(13)
Note that (Equation12
(12)
(12) ) is linear in the parameters
.
Finally, the optimal parameters, denoted as , are defined. By subdividing ejm(t) in (Equation12
(12)
(12) ) into ejr(t) and ejw(t), as defined in (Equation2
(2)
(2) ), and rearranging terms,
in (Equation12
(12)
(12) ) is given by
Recall from Section 2.2 that the goal of feedforward control is to minimise the reference-induced error ej + 1r(t, θj + 1). Given the definition of ejr(t) in (Equation2
(2)
(2) ) together with the parametrisation for Cj + 1ff(q, θj + 1) in (Equation3
(3)
(3) ), it directly follows that the reference-induced error contribution in (Equation12
(12)
(12) ) can be expressed as
(14)
(14)
Then, the optimal parameters
are defined such that (Equation14
(14)
(14) ) is equal to zero for all t, i.e.
which directly implies that ejr(t) = (ϕj(t))Tθ0Δ, and consequently that
(15)
(15)
Note that this definition of θΔ0 implies that Cj + 1ff(q, θ0) = P− 1(q), where θ0 = θj + θΔ0. This is in accordance with Assumption 2.2.
3.2 An instrumental variable approach to iterative feedforward control
A general framework is proposed in Boeren, Oomen, et al. (Citation2015) for iterative feedforward control based on instrumental variables (IV). The rationale is that unbiased estimates of are obtained without the need for a correct model of wj, which is in contrast to least-squares estimation, including van der Meulen et al. (Citation2008). In IV-based approaches, V(θΔ) is typically selected as
(16)
(16)
where
are instrumental variables that are uncorrelated with wj, W is a positive-definite weighting matrix, nz ≥ nθ, L(q) is a prefilter and
in (Equation12
(12)
(12) ). Since r(t) is uncorrelated with wj, the instrumental variables z(t) are in the remainder of this paper selected as a function of (derivatives of) r(t).
Since is quadratic in θΔ, the minimiser
of
follows from the necessary condition for optimality
since W is a positive-definite matrix. By substituting (Equation12
(12)
(12) ) in (Equation16
(16)
(16) ), it is straightforward to show that the minimiser
of V(θΔ) in (Equation16
(16)
(16) ) is given by
(17)
(17)
where
is nonsingular, and
.
The key idea behind (Equation16(16)
(16) ) is that high performance is obtained if z(t), consisting of (derivatives of) r(t), and
are uncorrelated. This concept is, in fact, very well known and finds its roots in traditional feedforward tuning techniques in control engineering, as illustrated in the following example.
Example 3.1:
Let Cjff(q) = 0, i.e. only a feedback controller is used in task j. Furthermore, is given by
with basis function
and parameter θa. This parametrisation corresponds to acceleration feedforward with acceleration a(t) = ψa(q−1)r(t), i.e. the second derivative of r(t), while θa denotes the mass of the system. Note that double differentiation is possible since r(t) is a known, noise-free signal. The instruments are selected as z(t) = a(t), while W = I, nz = nθ, and L(q) = I. For this specific case, (Equation16
(16)
(16) ) becomes
(18)
(18)
where
. The aim of the IV approach is to determine θa such that a(t) and
are uncorrelated.
For the considered experimental setup in Section 7, the (normalised) a(t) of a typical r(t) is depicted in , together with based on (1) θa = 0 (red), and (2) the minimiser
of V(θa) in (Equation18
(18)
(18) ) (green). Clearly, high performance is obtained with
, i.e. when a(t) and
are uncorrelated. In contrast, low performance is obtained for θa = 0, which corresponds to significant correlation between a(t) and
. This shows that the correlation between a(t) and
is a measure for the performance of a motion system.
Next, the asymptotic covariance matrix PIV is derived that is related to . Consider the asymptotic distribution of
given by
(19)
(19)
where θΔ0 is the asymptotic parameter estimate as defined in (Equation15
(15)
(15) ). It can be shown that
is a consistent estimator, i.e.
converges to θΔ0 for N to infinity, along similar lines as in, e.g. Söderström, Stoica, and Trulsson (Citation1987). Then, the asymptotic covariance matrix PIV in (Equation19
(19)
(19) ) is given by
(20)
(20)
with
(21)
(21)
and reference-induced part ϕjr(t) of ϕj(t) in (Equation13
(13)
(13) ) given by
(22)
(22)
with yjr(t) as in (Equation2
(2)
(2) ). A derivation of (Equation20
(20)
(20) ) for iterative feedforward control follows the proof derived in Söderström and Stoica (Citation1989, App. A8.1) for open-loop identification, and Söderström et al. (Citation1987, Section 3) for closed-loop identification.
Note that PIV in (Equation20(20)
(20) ) depends on the design of z(t) and L(q). Next, a lower bound is derived for PIV as a function of z(t) and L(q), which corresponds to the minimum variance achievable with an IV method for feedforward control.
3.3 Optimal design procedure for z(t) and L(q)
The covariance matrix PIV in (Equation20(20)
(20) ) depends on the design of z(t) and L(q). Optimal accuracy in terms of variance is obtained if z(t) and L(q) are designed such that PIV is equal to an optimal covariance matrix
, where for any z(t) and L(q), it holds that
The optimal covariance matrix
for iterative feedforward control based on instrumental variables is given by
(23)
(23)
where
. A derivation of
follows along similar lines as the derivation for open-loop identification in Söderström and Stoica (Citation1989, Chapter 8).
Equivalence between PIV in (Equation20(20)
(20) ) and
in (Equation23
(23)
(23) ) holds if z(t), L(q) and W are designed as
(24)
(24)
and ϕjr(t) in (Equation22
(22)
(22) ). This result follows by substituting zopt(t), Lopt(q), and Wopt in (Equation20
(20)
(20) ). Note that this design is not unique, and closely related to the proposed instrumental variables in the RIV algorithms.
The following two observations are made based on zopt(t), Lopt(q), and Wopt. First, the optimal design reveals that minimum variance is obtained when the number of instruments nz is equal to the number of parameters nθ, and uniform weighting (W = I) is applied for t = 1, ..., N. Based on this observation, W and nz are furthermore selected as W = I and nz = nθ. Then, (Equation20(20)
(20) ) becomes
(25)
(25)
with
and J as in (Equation21
(21)
(21) ). Furthermore, (Equation17
(17)
(17) ) reduces to a basic IV method, i.e.
(26)
(26)
Second, the optimal instruments zopt(t) cannot be determined since P(q) is assumed to be unknown in the developed framework. To see this, note that ϕjr(t) in (Equation22(22)
(22) ), and in particular yjr(t), cannot be determined based on the known r(t), and measured ejm(t) and yjm(t) when P(q) is unknown. In the next section, a novel algorithm is proposed that alternates between iteratively updating the estimate of the noise-free zopt(t), and determining
, similar to the algorithms described in Young (Citation2015).
4. Proposed approach achieving optimal accuracy
4.1 Proposed RIV algorithm
The algorithm proposed in this section is an iterative method to achieve optimal accuracy by jointly updating the estimate of the optimal instruments zopt(t) in (Equation24(24)
(24) ) and solving for
as in (Equation26
(26)
(26) ). Note that measured data from a single task is sufficient. Related iterative RIV methods are developed in system identification (see Jakeman & Young (Citation1979); Young, Citation2015; Young & Jakeman (Citation1979, Citation1980).
Let the index i denote the ith computational iteration of the proposed algorithm. Furthermore, denotes the parameter estimate in iteration i − 1. In the ith iteration, zopt(t) is approximated by
(27)
(27)
Subsequently, zp, <i >(t) in (Equation27
(27)
(27) ) is used to determine
in the ith iteration similar to (Equation26
(26)
(26) ):
where
with ϕj(t) in (Equation13
(13)
(13) ), and
with ejm(t) in (Equation1
(1)
(1) ). The proposed algorithm to determine
with optimal accuracy is summarised in Algorithm 4.1.
Algorithm 4.1:
Determine with optimal accuracy
| (a) | Initialise | ||||
| (b) | Construct | ||||
| (c) | Construct instrumental variables
| ||||
| (d) | Determine | ||||
| (e) | Solve for | ||||
| (f) | Set i → i + 1 and repeat from Step (b) until a stopping criterion is met. | ||||
| (g) | Set | ||||
Before initiating Algorithm 4.1, it is advised to determine an initial parameter θj by using a linear least squares estimation approach as in van der Meulen et al. (Citation2008). Similar to the RIV algorithms presented in Young (Citation2015), practical use has shown that such an initial estimate is typically sufficient for subsequent convergence of Algorithm 4.1.
Remark 4.1:
An approach to deal with possible instability of in computing zp, <i >(t) is given in Boeren, Oomen, et al. (Citation2015, Appendix A).
4.2 Accuracy analysis of the proposed approach
In this section, it is shown that optimal accuracy in terms of accuracy is obtained with Algorithm 4.1. Consider the covariance matrix PIV, p corresponding to zp, <i >(t) as given in . The covariance PIV, p follows by substituting (Equation27(27)
(27) ) in (Equation25
(25)
(25) ). Clearly, optimal accuracy for the proposed method, i.e. PIV, p equal to
in (Equation23
(23)
(23) ), is obtained if zp, <i >(t) converges to zopt(t) in Algorithm 4.1.
Table 1. The comparison study presented in Sections 4 and 5 of this paper shows that optimal accuracy is not achieved with the existing approaches in van der Meulen et al. (Citation2008) and Boeren, Oomen, et al. (Citation2015) while the proposed approach can achieve optimal accuracy upon convergence of the proposed RIV algorithm.
To show that zp, <i >(t) converges to zopt(t) in subsequent iterations of the proposed algorithm, substitute (Equation2(2)
(2) ) and (Equation22
(22)
(22) ) in (Equation24
(24)
(24) ) to obtain
(28)
(28)
where the last equality is obtained by using the commutative property of SISO systems. Then, the difference between zopt(t) and zp, <i >(t) in the ith iteration can be expressed as
and zp, <i >(t) = zopt(t), i.e. optimal accuracy, is obtained if
(29)
(29)
It remains to be shown that (Equation31(31)
(31) ) holds, i.e. zp, <i >(t) converges to zopt(t), to guarantee that Algorithm 4.1 results in optimal accuracy. Recall from Section 3 that
in iteration i = 1 is a consistent estimator, i.e.
for N to infinity, and that consistency of
implies that
(30)
(30)
Substituting (Equation29
(29)
(29) ) in (Equation29
(29)
(29) ) with i = 2 and rearranging terms illustrates that zp, <2 >(t) = zopt(t). This result shows that optimal accuracy in terms of accuracy is achieved with Algorithm 4.1.
Remark 4.2:
For finite N, is not exactly equal to θΔ0 and multiple iterations are typically required to refine zp, <i >(t). Practical use of the algorithm shows good convergence properties. This is in accordance with the convergence analysis for closely related iterative RIV algorithms (Young, Citation2015).
4.3 Design procedure
Next, Algorithm 4.1 is embedded in a design procedure to determine Cj + 1ff(q, θj + 1) according to (Equation7(7)
(7) ) with V(θΔ) in (Equation16
(16)
(16) ). This design procedure implements the main contribution of this paper, and is given next.
Procedure 4.1:
Estimation of Cj + 1ff(q, θj + 1) after the jth task:
| 1. | Measure ejm(t) and yjm(t) for | ||||
| 2. | Construct ϕj(t) = Ψ(q)(Cfb(q) + Cjff(q, θj))− 1yjm(t). | ||||
| 3. | Algorithm 4.1: Determine | ||||
| 4. | Construct | ||||
| 5. | Set j → j + 1 and go to Step 1. | ||||
Remark 4.3:
Procedure 4.1 is based on measured data from a single task. The proposed procedure can directly be implemented as a (batch-wise) recursive approach, where measured data from multiple tasks is used to reduce the variance of .
5. Accuracy analysis of existing approaches
In this section, the accuracy properties of the iterative feedforward tuning approaches in van der Meulen et al. (Citation2008) and Boeren, Oomen, et al. (Citation2015) are compared with the optimal approach derived in Section 3. An overview of this comparison is provided in .
5.1 Accuracy analysis of the approach in Boeren, Oomen, et al. (Citation2015)
The instrumental variable approach in Boeren, Oomen, et al. (Citation2015) uses as instruments z1(t) = Ψ(q)r(t), with Ψ(q) the basis functions of Cjff(q), and L1(q) = 1. The covariance matrix PIV, 1 corresponding to this design follows by substituting z1(t) and L1(q) = 1 in (Equation25(25)
(25) ), and is given by
(31)
(31)
Based on (Equation31
(31)
(31) ) and (Equation23
(23)
(23) ), it can be shown that
i.e. the approach in Boeren, Oomen, et al. (Citation2015) results in non-optimal accuracy in terms of variance.
5.2 Accuracy analysis of the approach in van der Meulen et al. (Citation2008)
The iterative feedforward approach proposed in van der Meulen et al. (Citation2008) utilises L2(q) = 1 and z2(t) = ϕ2(t) as instruments, where ϕ2(t) = Ψ(q)(Cfb(q) + Cjff(q))− 1ym(t) is constructed based on measured data obtained in an additional task. As such, measured data from two tasks is required to determine , which results in a
reduced accuracy compared to the optimal approach in Section 3. To see this, note that the asymptotic distribution of
corresponding to z2(t) yields
(32)
(32)
based on two tasks of each N samples, where PIV, 2 yields
In contrast, the asymptotic distribution corresponding to the optimal instruments zopt is given by
(33)
(33)
based on two tasks of each N samples. Comparing (Equation32
(34)
(34) ) and (Equation33
(33)
(33) ) reveals a
reduced accuracy for the approach based on z2(t) when compared to the optimal approach. This result confirms that non-optimal accuracy is obtained with the approach proposed in van der Meulen et al. (Citation2008).
6. Simulation example
In this section, a simulation study is presented to
| (1) | Confirm that unbiased parameter estimates are obtained for all considered IV approaches in , | ||||
| (2) | Show that the proposed approach zp, <i >(t) leads to enhanced accuracy of the parameter estimates compared to the pre-existing approaches based on z1(t) and z2(t), | ||||
| (3) | Illustrate the close relation between the statistical accuracy of | ||||
6.1 System description
Consider the system P(q) given by
which represents a two-mass spring damper system with non-collocated dynamics (see for a Bode plot). A schematic illustration of the two-mass spring damper system is depicted in . The feedback controller Cfb(q) is given by
Recall from Section 2.2 that the unknown disturbance wj(t) is assumed to be given by wj(t) = H(q)εj(t). Here, H(q) is designed such that Assumption 2.1 holds, i.e. H(q) = 1 + P(q)Cfb(q), and {εj(t)} is normally distributed white noise with zero mean and standard deviation λε = 2.5 × 10−8. The system is excited by a third-order reference signal, designed as in Biagiotti and Melchiorri (Citation2012). Furthermore, the feedforward controller Cjff(q, θj) is parametrised as
with basis functions
parameters θj = [θja, θsj]T, and sampling time Ts = 5 × 10−4 s. Hence, Cjff(q, θj) consist of acceleration feedforward ψa(q− 1)θja and snap feedforward ψs(q− 1)θjs. Straightforward computations reveal that the true parameter vector θ0 of Cjff(q, θj), as defined in Section 3, is given by θ0 = [22, 3 × 10−5]T. This implies that the reference-induced contribution ejr(t) is equal to zero for all t when Cjff(q, θ0) is used as feedforward controller.
A Monte Carlo simulation study is performed for the proposed approach with zp, <i >(t) in (Equation27(27)
(27) ) and the pre-existing approaches based on z1(t) and z2(t). The number of realisations is equal to m = 200, and a parameter estimate in the lth realisation is denoted
. In a single realisation, M = 5 tasks are performed, consisting of N = 6000 samples each. After the jth task in the lth realisation, Procedure 4.1 is used to determine
based on θjl, and the measured signals ejm and yjm in the jth task. The initial parameter vector is given by θinit = [16, 1 × 10−5]T. The sample mean corresponding to the jth task in the lth realisation is defined as
(34)
(34)
with
The corresponding feedforward controller is denoted as
.
6.2 Simulation results: parameter estimation
The results of the Monte Carlo simulation study are given in and . The following observations are made:
| (1) | Unbiased estimates of θ0, i.e. 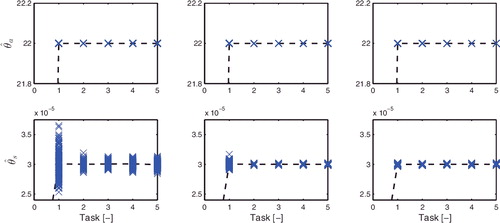 | ||||
| (2) | The standard deviation of | ||||
Table 2. Summary of results of Monte Carlo simulation. The mean value of  and in task j = 1 for zp, <i >(t), z1(t) and z2(t) confirm that unbiased parameter estimates are obtained for all methods, while the standard deviation of and confirms that an enhanced accuracy is obtained with the proposed approach zp, <i >(t) compared to z1(t) and z2(t).
and in task j = 1 for zp, <i >(t), z1(t) and z2(t) confirm that unbiased parameter estimates are obtained for all methods, while the standard deviation of and confirms that an enhanced accuracy is obtained with the proposed approach zp, <i >(t) compared to z1(t) and z2(t).
6.3 Simulation results: accuracy and performance
Next, the relation between the statistical accuracy of the estimated parameters and the obtained performance is analysed for the considered system. Recall from (Equation6(6)
(6) ) that a high-performance Cjff(q, θj) minimises ejr(t, θj), i.e. the error induced by the known r(t). Since
in (Equation34
(34)
(34) ) is an unbiased estimate of θ0 for all approaches in , it follows from Section 3 that
for all t when
is used as feedforward controller. Consequently, (Equation1
(1)
(1) ) implies that
(35)
(35)
which is the best possible result in the developed framework for a fixed Cfb(q). However, as already shown in Section 6.2, the estimate
in realisation l can significantly deviate from the sample mean
. In this section, the influence of this deviation on the achieved performance is analysed for the IV approaches in .
Suppose that ,
and
are stored for all tasks, i.e. j = 1, …, 5, and all realisations, i.e. l = 1, …, 200. Let
denote the parameters such that
for l = 1, …, 200. The corresponding worst-case error
follows from (Equation1
(1)
(1) ) as
(36)
(36)
while the feedforward controller is denoted as
. Next, it is shown that enhanced accuracy in terms of variance results in a smaller difference between
in (Equation36
(36)
(36) ) and
in (Equation35
(35)
(35) ), i.e. improved worst-case performance.
The error in task j = 1 and cumulative power spectrum are depicted in and , respectively. The following observations are made:
| (1) | For zp, <i >(t), the contribution of 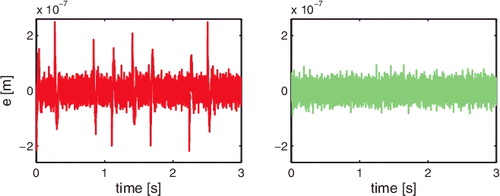 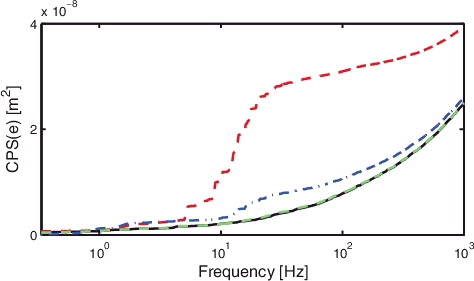 | ||||
| (2) | For z1(t), the contribution of | ||||
Similar results as provided for z1(t) are obtained for z2(t), and are omitted for brevity.
The provided simulation study showed that an enhanced accuracy of the parameter estimates results in a reduced difference between in (Equation36
(36)
(36) ) and
in (Equation35
(35)
(35) ). Hence, the worst-case error
based on a single set of measured data is improved by using the proposed instruments zp, <i >(t). This confirms that the statistical accuracy properties of
are important for performance.
7. Experimental results
In this section, the proposed approach in Section 4 is applied to the prototype industrial nanopositioning system depicted in . The positioning stage, measurement system, and actuation system are placed on a vibration isolation table to isolate the system from external disturbances originating from the environment.
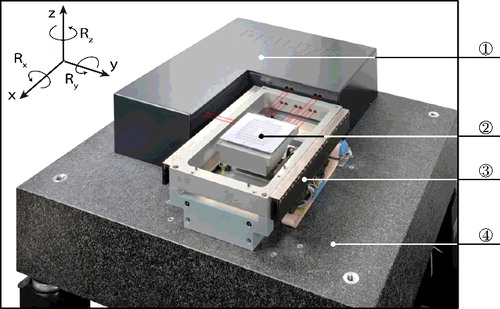
The positioning stage is magnetically levitated and actuated, and controlled in six motion degrees of freedom (DOFs): three translations (x, y, and z) and three rotations (Rx, Ry and Rz). Magnetically levitated stages exhibit contactless operation. Therefore, friction (which is typically an important disturbance in motion control) is eliminated.
The actuation system consists of six linear magnetic motors, with an added position offset such that each actuator can also generate a force in the perpendicular direction. The permanent magnets are connected to the vibration isolation table, while the coils are part of the positioning stage.
The measurement system consists of laser interferometers in conjunction with a mirror block, connected to the vibration isolation table and the positioning stage, respectively. This system enables high-accuracy position measurements in all six motion DOFs. In particular, subnanometer resolution position measurements are available for the translational DOFs x, y and z. Throughout, all systems and signals operate in discrete time with a sampling time of Ts = 2 × 10−4 s.
7.1 Control configuration and reference signal design
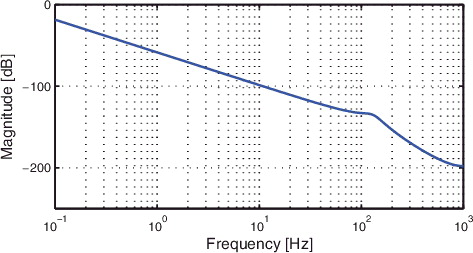
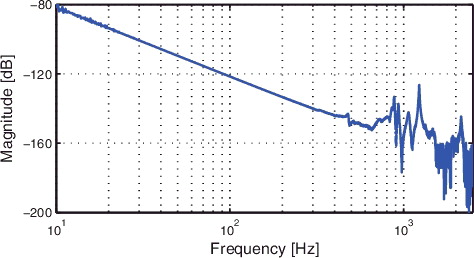
The proposed design procedure for the feedforward controller is applied to the x-direction of the system, i.e. the long-stroke (80 mm) direction of the setup in . A stabilising feedback controller is designed for the multivariable system by means of sequential loopshaping (see Skogestad & Postlethwaite, Citation2005, Section ) for details. By closing the control loops for the remaining 5 DOFs, i.e. y, z, Rx, Ry and Rz, a single-input, single-output equivalent system P(q) is obtained for the x-direction. The frequency response function of the equivalent system P(q) for the x-direction is depicted in . The dynamical response of a linear motion system P(s), where s is the Laplace operator, with proportional damping can be written as a sum of N second-order subsystems
(37)
(37)
with n the number of rigid-body modes, cTi the ith column of the output matrix
, bi the ith row of the input matrix
, ζi the dimensionless damping constant, and ωi the natural frequency of the ith second-order subsystem. Inspection reveals rigid-body behaviour (as described by the first term in (Equation37
(37)
(37) )) below approximately 300 Hz, while the first resonance phenomena (as described by the latter term in (Equation37
(37)
(37) )) appear at 480 and 860 Hz. For a motion system with dominant rigid-body dynamics in the frequency range of interest, parametric models are typically developed that only describe the rigid-body dynamics, i.e. the first term in (Equation37
(37)
(37) ).
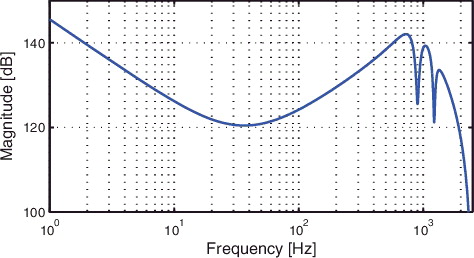
The feedback controller Cfb(q) for the x-direction of the system is depicted in , and achieves a bandwidth (defined as the lowest frequency where |CfbP| = 1) of 120 Hz. This bandwidth results in rejection of low-frequency disturbances, while having sufficient robustness against uncertainty in the resonances of P(q).
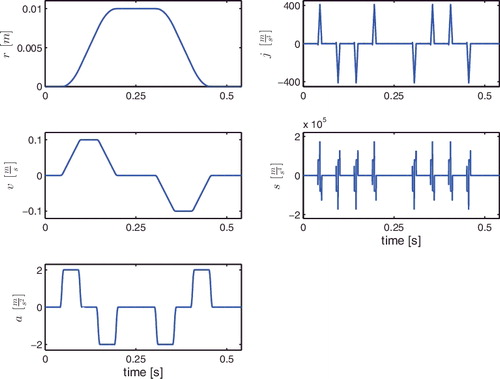
The reference r(t) of the performed servo task is depicted in , together with its acceleration, jerk and snap, i.e. the second, third and fourth derivative of r(t).
7.2 Parametrisation feedforward controller
For the general parametrisation of Cff(q, θ) in (Equation3(3)
(3) ), (1) the number of parameters nθ and (2) the selection of basis functions Ψ(q) should be determined to obtain Cff(q, θ). Here, the parametrisation of Cff(q, θ) is chosen as in Lambrechts et al. (Citation2005). This parametrisation is developed for motion systems with dominant rigid-body dynamics as in , and is given by
(38)
(38)
with basis functions Ψ(q) = [ψv(q−1), ψa(q−1), ψj(q−1), ψs(q−1)], where
(39)
(39)
and corresponding parameters
. For Cff(q, θ) in (40), it holds that
i.e. the static gain of Cff(q, θ) is equal to zero. This condition implies that the feedforward signal uff is equal to zero when the system is in stand-still, which is a desired property for motion systems with rigid-body dynamics. Furthermore, recall that the considered experimental setup operates contactless, thereby eliminating performance-deteriorating friction. As such, friction feedforward is not included in the feedforward controller in (40).
7.3 Experimental results for optimal IV method
In this section, the key experimental results of this paper are presented, which involve the application of Procedure 4.1 on the nanopositioning system in . Five tasks are performed of N = 2700 samples each, with r(t) as depicted in . In addition, r(t) filtered by the basis functions in (41) is shown in .
During the jth task, the measured signals ejm(t) and yjm(t), for t = 1, ..., N, are stored. Then, this batch of measured data is used to determine Cj + 1ff(q, θj + 1). To initialise Procedure 4.1, C1ff(q, θ1) in the first task has parameters θ1 = [0, 0, 0, 0]T, i.e., C1ff(q, θ1) = 0. The performance obtained in task j = 1 is, therefore, the performance with only feedback control applied to the system. Alternatively, the linear least squares estimation approach in van der Meulen et al. (Citation2008) can be used to determine an initial parameter vector θ1.
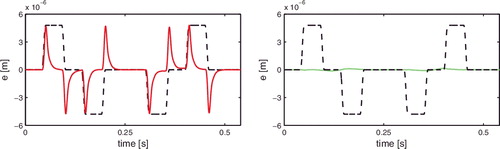
The measured error signal ejm(t) in the first, second and third task are depicted in , while the corresponding cumulative power spectrum is shown in . In addition, the two-norm of ejm(t), i.e. ‖ejm(t)‖22, as a function of tasks is depicted in . The following observations are made:
| (1) | The peak value of e3m(t) in task j = 3 is reduced by approximately 97% when compared to e1m(t) in the first task. This confirms that the proposed iterative feedforward approach significantly enhances the positioning accuracy of the system compared to only feedback control. 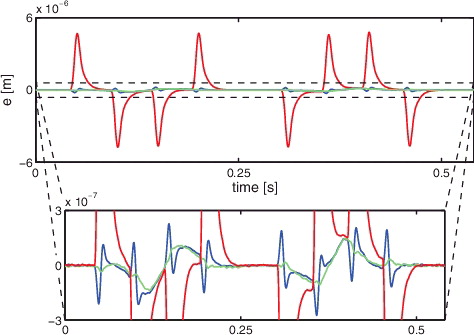 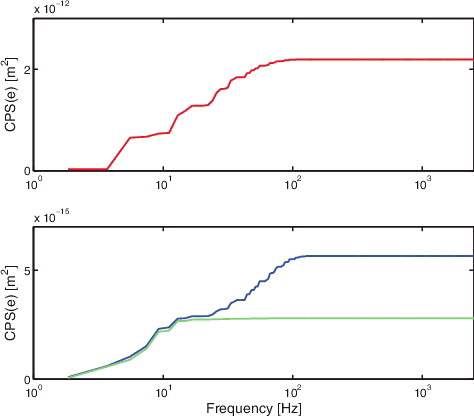 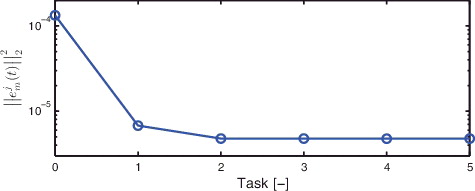 | ||||
| (2) | and show that the low-frequency contribution up to approximately 10 Hz is not compensated for by C3ff(q, θ3) in task j = 3. This implies that the dynamical behaviour of the experimental setup in this frequency range is not captured by the parametrisation proposed in Section 7.2. This can be contributed to the dynamics of the cable connection between the fixed world and the (moving) positioning stage, which acts as a low-frequency disturbance on the system. | ||||
| (3) | shows that ‖ejm(t)‖22 converges in two tasks. This confirms that fast convergence in terms of ‖ejm(t)‖22 is obtained with the proposed approach. | ||||
7.4 Analysis of Algorithm 4.1
The iterative refinement of zp, <i >(t) proposed in Algorithm 4.1 is an essential attribute of Procedure 4.1. In this section, Algorithm 4.1 is illustrated for the considered experimental setup. Recall from (Equation28(28)
(28) ) that the optimal instruments zopt(t) can be expressed as
and optimal accuracy is obtained, i.e. zp, <i >(t) = zopt(t), if
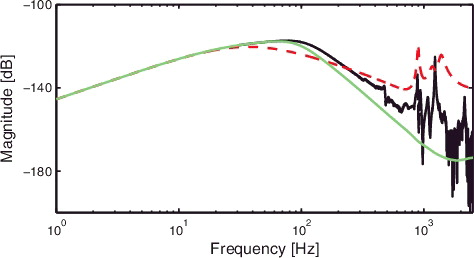
This result enables a visual illustration of Algorithm 4.1 by comparing the identified frequency response function of S(q)P(q) with the frequency response of (Cfb(q) + Cjff, <i >(q))− 1.
The analysis in this section is based on the measured signals e1m(t) and y1m(t), for t = 1, …, N, in task j = 1 with C1ff(q, θ1) implemented on the experimental setup. Furthermore, the number of computational iterations of Algorithm 4.1 is given by K = 3. reveals that (Cfb + C1ff, <3 >)− 1 in iteration i = 3 of Algorithm 4.1 is a significantly improved approximation of S(q)P(q) in the frequency range up to 200 Hz, when compared to iteration i = 1. This confirms that iterative refinement of zp, <i >(t) by means of Algorithm 4.1 results in zp, <i >(t) that resemble the optimal zopt(t).
7.5 Enhanced flexibility to reference variations and comparison with ILC
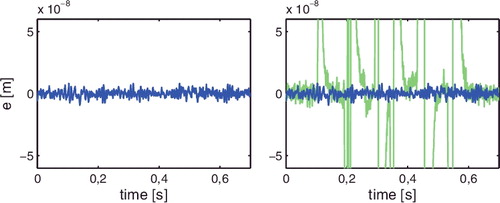
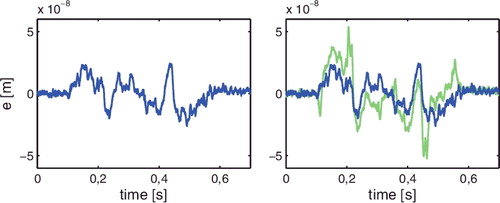
As is argued in Sections 1 and 2, the key motivation for the proposed feedforward approach compared to ILC algorithms is an enhanced flexibility with respect to changes in the reference trajectory. To demonstrate this flexibility, two similar yet slightly different reference trajectories are applied to the considered nanopositioning system. These reference trajectories are depicted in . Then, the optimal IV approach proposed in Section 4 is compared to the standard frequency-domain ILC-based approach (see, e.g. Bristow et al., Citation2006).
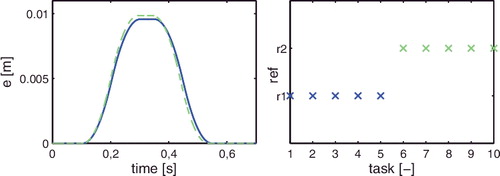
The measured error signals e5(t) in task j = 5 and e6(t) in task j = 6 as depicted in for ILC, and in for the proposed optimal IV approach confirm that (1) the servo performance obtained with ILC severely deteriorates when the reference is slightly changed and (2) the proposed approach is insensitive to reference changes. Note that the error in tasks j = 5 is smaller for ILC than for the proposed approach. Since motion systems are typically confronted with similar yet slightly different reference signals (Lambrechts et al., Citation2005; Oomen et al., Citation2014), the proposed optimal IV approach is preferred in industrial practice since learning transients are eliminated when the reference trajectory is changed.
8. Conclusions
In this paper, a new algorithm is proposed for iterative feedforward control based on instrumental variables. The key advantage of the proposed algorithm is that it achieves optimal accuracy in terms of variance, in contrast to existing approaches, which are shown to be non-optimal. To achieve optimal accuracy, the proposed algorithm iteratively updates an estimate of the optimal instruments. The assumptions that are introduced in Section 2.2 are for a large class of motion systems nonrestrictive for the achievable performance. If the considered motion system is subject to reference signals with high-frequency signal content, the proposed approach can be extended by allowing more general parametrisations by means of input shaping (Boeren, Bruijnen, van Dijk, et al. Citation2014) and rational feedforward (Bolder & Oomen, Citation2015). The proposed method is validated by means of a simulation example, showing improved accuracy compared to pre-existing approaches. Finally, the procedure is successfully applied to an industrial nanopositioning system. The presented experimental results confirm the practical relevance of the proposed approach.
Ongoing research focuses on extensions towards optimal input design (Formentin, Karimi, & Savaresi, Citation2013a), inferential control, positioning-varying effects (Groot Wassink, van de Wal, Scherer, & Bosgra, Citation2005) and multivariable systems. For the considered nanopositioning system in , improved performance can be obtained by compensating for the dynamics of the cable connection between the fixed world and the (moving) positioning stage by means of feedforward control.
Acknowledgements
The authors acknowledge Maarten Steinbuch and Leon van Breugel for their contribution to this work.
Disclosure statement
No potential conflict of interest was reported by the authors.
Additional information
Funding
References
- Åström, K. (1970). Introduction to stochastic control theory. Mathematics in science and engineering (Vol. 70). New York, NY: Academic Press.
- Bazanella, A.S., Campestrini, L., & Eckhard, D. (2012). Data-driven controller design: The
- Biagiotti, L., & Melchiorri, C. (2012). FIR filters for online trajectory planning with time- and frequency-domain specifications. Control Engineering Practice, 20, 1385–1399.
- Boeren, F., Blanken, L., Bruijnen, D., & Oomen, T. (2015). Rational iterative feedforward control: Optimal instrumental variable approach for enhanced performance. Proceedings of the conference on decision and control (pp. 6058–6063), Osaka, Japan.
- Boeren, F., Bruijnen, D., & Oomen, T. (2014). Iterative feedforward tuning approach and experimental verification for nano-precision motion systems. Proceedings of the ASME dynamic systems and control conference, San Antonio, TX, USA.
- Boeren, F., Bruijnen, D., van Dijk, N., & Oomen, T. (2014). Joint input shaping and feedforward for point-to-point motion: Automated tuning for an industrial nanopositioning system. IFAC Mechatronics, 24, 572–581.
- Boeren, F., Oomen, T., & Steinbuch, M. (2014). Accuracy aspects in motion feedforward tuning. Proceedings of the American control conference (pp. 2178–2183), Portland, OR, USA.
- Boeren, F., Oomen, T., & Steinbuch, M. (2015). Iterative motion feedforward tuning: A data-driven approach based on instrumental variable identification. Control Engineering Practice, 37, 11–19.
- Boerlage, M., Tousain, R., & Steinbuch, M. (2004). Jerk derivative feedforward control for motion systems. Proceedings of the American control conference (pp. 4843–4848), Boston, MA, USA.
- Bolder, J., & Oomen, T. (2015). Rational basis functions in iterative learning control – with experimental verification on a motion system. IEEE Transactions on Control Systems Technology, 23, 722–729.
- Bristow, D., Tharayil, M., & Alleyne, A. (2006). A survey of iterative learning control: A learning-based method for high-performance tracking control. IEEE Control Systems Magazine, 26, 96–114.
- Butterworth, J., Pao, L., & Abramovitch, D. (2012). Analysis and comparison of three discrete-time feedforward model-inverse control techniques for nonminimum-phase systems. IFAC Mechatronics, 22, 577–587.
- Clayton, G.M., Tien, S., Leang, K.K., Zou, Q., & Devasia, S. (2009). A review of feedforward control approaches in nanopositioning for high-speed SPM. Journal of Dynamic Systems, Measurement, and Control, 131, 0611011–06110119.
- Devasia, S. (2002). Should model-based inverse inputs be used as feedforward under plant uncertainty ? IEEE Transactions on Automatic Control, 47, 1865–1871.
- Fleming, A.J. (2014). Measuring and predicting resolution in nanopositioning systems. IFAC Mechatronics, 24, 605–618.
- Formentin, S., Karimi, A., & Savaresi, S.M. (2013a). Optimal input design for direct data-driven tuning of model-reference controllers. Automatica, 49, 1874–1882.
- Formentin, S., van Heusden, K., & Karimi, A. (2013b). A comparison of model-based and data-driven controller tuning. International Journal of Adaptive Control and Signal Processing, 28, 882–897.
- Forssell, U. (1999). Closed-loop identification: Methods, theory and applications. Linköping: Linköping University.
- Gilson, M., & Van den Hof, P. (2005). Instrumental variable methods for closed-loop system identification. Automatica, 41, 241–249.
- Gorinevsky, D. (2002). Loop-shaping for iterative control of batch processes. IEEE Control Systems Magazine, 22, 55–65.
- Groot Wassink, M., van de Wal, M., Scherer, C., & Bosgra, O. (2005). LPV control for a wafer stage: Beyond the theoretical solution. Control Engineering Practice, 13, 231–245.
- Gunnarsson, S., & Norrlöf, M. (2001). On the design of ILC algorithms using optimization. Automatica, 37, 2011–2016.
- Gunnarsson, S., & Norrlöf, M. (2006). On the disturbance properties of high order iterative learning control algorithms. Automatica, 42, 2031–2034.
- Heertjes, M., Hennekens, D., & Steinbuch, M. (2010). MIMO feed-forward design in wafer scanners using a gradient approximation-based algorithm. Control Engineering Practice, 18, 495–506.
- Hjalmarsson, H. (2009). System identification of complex and structured systems. European Journal of Control, 3, 275–310.
- Hjalmarsson, H., Gevers, M., Gunnarsson, S., & Lequin, O. (1998). Iterative feedback tuning: Theory and applications. IEEE Control Systems, 18, 26–41.
- Hoelzle, D.J., Johnson, A.J.W., & Alleyne, A.G. (2014). Bumpless transfer filter for exogenous feedforward signals. IEEE Transactions on Control Systems Technology, 22, 1581–1588.
- Jakeman, A.J., & Young, P.C. (1979). Refined instrumental variable methods of time-series analysis: Parts II. Multivariable systems. International Journal of Control, 29, 621–644.
- Janot, A., Gautier, M., Jubien, A., & Vandanjon, P.O. (2014). Comparison between the CLOE method and the DIDIM method for robots identification. IEEE Transaction on Control Systems Technology, 22, 1935–1941.
- Janot, A., Vandanjon, P.O., & Gautier, M. (2014a). A generic instrumental variable approach for industrial robot identification. IEEE Transaction on Control Systems Technology, 22, 132–145.
- Janot, A., Vandanjon, P.O., & Gautier, M. (2014b). An instrumental variable approach for rigid industrial robots identification. Control Engineering Practice, 25, 85–101.
- Jung, Y., & Enqvist, M. (2013). Estimating models of inverse systems. Proceedings of the conference on decision and control (pp. 7143–7148), Firenze, Italy.
- Kara-Mohamed, M., Heath, W.P., & Lanzon, A. (2015). Enhanced tracking for nanopositioning systems using feedforward/feedback multivariable control design. IEEE Transactions on Control Systems Technology, 23, 1003–1013.
- Karimi, A., Butcher, M., & Longchamp, R. (2008). Model-free precompensator tuning based on the correlation approach. IEEE Transactions on Control Systems Technology, 16, 1013–1020.
- Khalil, W., & Dombre, E. (2002). Modeling, identification, and control of robots. Bristol, PA: Taylor & Francis.
- Kim, K.S., & Zou, Q. (2013). A modeling-free inversion-based iterative feedforward control for precision output tracking of linear time-invariant systems. IEEE/ASME Transactions on Mechatronics, 18, 1767–1777.
- Kushner, H.J., & Yin, G.G. (2003). Stochastic approximation and recursive algorithms and applications. Stochastic modelling and applied probability (Vol. 35). New York, NY: Springer-Verlag.
- Lambrechts, P., Boerlage, M., & Steinbuch, M. (2005). Trajectory planning and feedforward design for electromechanical motion systems. Control Engineering Practice, 13, 145–157.
- Mishra, S., Coaplen, J., & Tomizuka, M. (2007). Precision positioning of wafer scanners: Segmented iterative learning control for nonrepetitive disturbances. IEEE Control Systems Magazine, 27, 20–25.
- Oomen, T., van Herpen, R., Quist, S., van de Wal, M., Bosgra, O., & Steinbuch, M. (2014). Connecting system identification and robust control for next-generation motion control of a wafer stage. IEEE Transactions on Control Systems Technology, 22, 102–118.
- Puthenpura, S.C., & Sinha, N.K. (1986). Identification of continuous-time systems using instrumental variables with application to an industrial robot. IEEE Transactions on Industrial Electronics, IE-33, 224–229.
- Skogestad, S., & Postlethwaite, I. (2005). Multivariable feedback control: Analysis and design (2nd ed.). West Sussex: John Wiley & Sons.
- Söderström, T. (2002). Discrete-time stochastic systems – estimation and control. London: Springer-Verlag.
- Söderström, T., & Stoica, P. (1983). Instrumental variable methods for system identification. Lecture notes in control and information sciences (Vol. 57). Berlin: Springer-Verlag.
- Söderström, T., & Stoica, P. (1989). System identification. Hemel Hempstead: Prentice Hall.
- Söderström, T., Stoica, P., & Trulsson, E. (1987). Instrumental variable methods for closed loop systems. Proceedings of the IFAC World Congress on automatic control (pp. 363–368), Munich, Germany.
- Steinbuch, M., & Norg, M. (1998). Advanced motion control: An industrial perspective. European Journal of Control, 4, 278–293.
- van de Wal, M., van Baars, G., & Sperling, F. (2000). Reduction of residual vibrations by H∞ feedback control. Proceedings of the fifth motion and vibration conference (MOVIC) (Vol. 2, pp. 481–486), Sydney, Australia.
- van de Wijdeven, J., & Bosgra, O. (2010). Using basis functions in iterative learning control: Analysis and design theory. International Journal of Control, 83, 661–675.
- van der Meulen, S., Tousain, R., & Bosgra, O. (2008). Fixed structure feedforward controller design exploiting iterative trials: Application to a wafer stage and a desktop printer. Journal of Dynamic Systems, Measurement, and Control, 130, 0510061–05100616.
- Yoshida, K., Ikeda, N., & Mayeda, H. (1992). Experimental study of the identification methods for an industrial robot manipulator. Proceedings of the international conference on intelligent robots and systems (pp. 263–270), Raleigh, NC, USA.
- Young, P.C. (1976). Some observations on instrumental variable methods of time-series analysis. International Journal of Control, 23, 293–612.
- Young, P.C. (2015). Refined instrumental variable estimation: Maximum likelihood optimization of a unified Box-Jenkins model. Automatica, 52, 35–46.
- Young, P.C., & Jakeman, A.J. (1979). Refined instrumental variable methods of time-series analysis: Parts I. Single input, single output systems. International Journal of Control, 29, 1–30.
- Young, P.C., & Jakeman, A.J. (1980). Refined instrumental variable methods of time-series analysis: Parts III. Extensions. International Journal of Control, 31, 741–764.
- Zhong, H., Pao, L.Y., & de Callafon, R.A. (2012). Feedforward control for disturbance rejection: Model matching and other methods. Proceedings of the Chinese conference on decision and control (pp. 3525–3533), Taiyuan, China.