

Graphical Abstract
Abstract
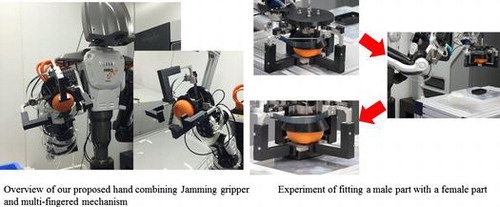
This paper proposes a novel robotic gripper used for assembly tasks that can adaptively grasp objects with different shapes. The proposed hand has a combined structure between two kinds of shape adaptive mechanisms where one is the granular jamming and the other is a multi-finger mechanism driven by a single wire. Due to the effect of the two shape adaptive mechanisms, the pose of a grasped object does not change during an assembly operation. The proposed hand has four fingers where two are the active ones and the other two are the passive ones. The pose of the grasped object can be uniquely determined since the passive fingers are used to orient an object placed on a table before the active fingers are closed to grasp it. Assembly experiments of some kinds of parts are shown to validate the effectiveness of our proposed gripper.
Acknowledgements
The authors would like to thank the members of the manipulation research group, intelligent systems research institute, national institute of advanced industrial science and technology (AIST) for their helpful discussions.
Notes
No potential conflict of interest was reported by the authors.