

ABSTRACT
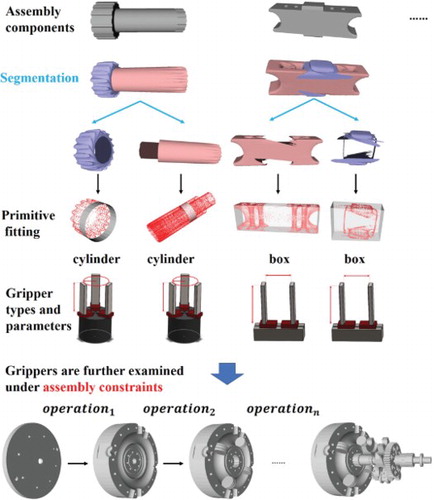
In this paper, we present a structured approach to selecting and designing a set of grippers for an assembly task. Compared to current experience-based gripper design method, our approach accelerates the design process by automatically generating a set of initial design options for gripper types and parameters according to the CAD models of assembly components. We use mesh segmentation techniques to segment the assembly components and fit the segmented parts with shape primitives, according to the predefined correspondence between shape primitive and gripper type, suitable gripper types and parameters can be selected and extracted from the fitted shape primitives. Moreover, we incorporate the assembly constraints in the further evaluation of the initially obtained gripper types and parameters. Considering the affordance of the segmented parts and the collision avoidance between the gripper and the subassemblies, applicable gripper types and parameters can be filtered from the initial options. Among the applicable gripper configurations, we further optimize the number of grippers for performing the assembly task, by exploring the gripper that is able to handle multiple assembly components during the assembly. Finally, the feasibility of the designed grippers is experimentally verified by assembling a part of an industrial product.
GRAPHICAL ABSTRACT
Disclosure statement
No potential conflict of interest was reported by the authors.
Notes
1 Simultaneously grasping multiple segments is not considered in this paper.
2 More gripper types and shape primitives can be used to cope with more complex shapes.
3 The object and the main body of the finger are assumed to be rigid, but soft pad can be attached to the fingertip.
4 Assume soft finger contact and constant external forces.
Additional information
Notes on contributors
Jingren Xu
Jingren Xu received his B.E. from Shanghai Jiao Tong University and M.E. from The University of Tokyo in 2016 and 2019, respectively. Currently, he is a PhD student working on Robotics, his research interests include grasping, motion planning, and trajectory optimization for mobile manipulators.
Weiwei Wan
Weiwei Wan received the Ph.D. degree in robotics from the Department of Mechano-Informatics, The University of Tokyo, Tokyo, Japan, in 2013.,From 2013 to 2015, he was a Post-Doctoral Research Fellow of the Japan Society for the Promotion of Science, Tokyo, and a Visiting Researcher with Carnegie Mellon University, Pittsburgh, PA, USA. He was a tenure-track Research Scientist with the National Advanced Institute of Science and Technology (AIST), Tokyo. He is currently an Associate Professor with the School of Engineering Science, Osaka University, Osaka, Japan. His research interests are smart manufacturing and robotic manipulation. He is a member of RSJ and a senior member of IEEE.
Keisuke Koyama
Keisuke Koyama received the B.E., M.E. and Ph.D. in Eng. degrees in mechanical engineering and intelligent Systems from the University of ElectroCommunications (UEC), in 2013, 2015 and 2017, respectively. He was a research fellow of Japan Society for the Promotion of Science (JSPS) from 2015 to 2017. He researched on high-speed proximity sensor for pre-grasping and integrated control of multi-degree-of-freedom robot hand and arm. From 2017 to 2019, he was project Assistant Professor, Department of Information Physics and Computing, Graduate School of Information Science and Technology, The University of Tokyo. Since 2019, he has been Assistant Professor, Department of Systems Innovation, Graduate School of Engineering Science, Osaka University. And, he has been Visiting Researcher, Department of Information Physics and Computing, Graduate School of Information Science and Technology, The University of Tokyo. His current research focuses on high-speed, highprecision proximity sensing for high-speed robotic manipulation and assembly.
Yukiyasu Domae
Yukiyasu Domae received his BE, ME and PhD degrees from Hokkaido University, Japan, in 2004, 2006 and 2012, respectively. From 2008 to 2013, he worked as a Researcher in the Image Recognition Systems Group of the Advanced Technology R&D Center of Mitsubishi Electric Corporation, Japan. From 2013 to 2018, he worked as a Principal Researcher in the same group. In 2018, he joined the National Institute of Advanced Industrial Science and Technology as the Group Leader of the Manipulation Research Group. Since 2019, he works as the Team Leader of the Automation Research Team in the same institution. His research interests include machine vision and manipulation.
Kensuke Harada
Kensuke Harada received his B.Sc., M.Sc., and Doctoral degrees in Mechanical Engineering from Kyoto University in 1992, 1994, and 1997, respectively. He worked as a Research Associate at Hiroshima University from 1997 to 2002. He worked as a research scientist at the National Institute of Advanced Industrial Science and Technology (AIST) from 2002 to 2013. For one year from 2005 to 2006, he was a visiting scholar at the computer science department of Stanford University. From 2013 to 2015, he was the leader of the manipulation research group, AIST. Currently, he is a professor at the Graduate School of Engineering Science, Osaka University. His research interest includes mechanics and control of robot manipulators and robot hands, biped locomotion, and motion planning of robotic systems.