
 ?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.
?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.Abstract
This paper investigates the heading control problem of maritime autonomous surface ships (MASSs) in the presence of actuator anomalies. A shared control framework that includes a ship autopilot and a human pilot, is constructed to realize the accurate tracking of the time-varying command signals. Specifically, the human pilot is responsible for high-level decision making such as anomaly estimation, anomaly correction and monitoring analysis, and the ship autopilot is responsible for a low-level task of command following. With the proposed shared control framework, the ability of the ship autopilot can be significantly enhanced compared to entirely automated tracking. Through Lyapunov stability analysis, it is proven that the tracking error is ultimately bounded, while all the signals of the closed-loop system remain bounded. Finally, a simulation example is presented to prove the effectiveness of the proposed shared control architecture for MASSs under actuator anomalies.
1. Introduction
With rapid development of science and technology, the applications and control issues of autonomous surface ships have drawn intensively attention in the past few decades. To mention a few, in Peng et al. (Citation2019), the distributed time-varying formation control problem was addressed for a swarm of under-actuated autonomous surface vehicles subject to unknown input gains. In Peng et al. (Citation2017), a modular design method for marine surface vehicles was proposed to address the containment maneuvering problem guided by multiple virtual leaders. In Liu et al. (Citation2017), a design method for the saturated coordinated control problem was presented to address the formation problem of multiple unmanned surface vehicles over a closed curve while holding a symmetric formation. For more details on the control applications of multiple surface ships, pleased refer to the survey (Peng et al., Citation2020).
Heading control of autonomous surface ships have been treated as a basic yet challenging control problem of marine applications, which is quite important for the routine operation and safe navigation of the ships. Precise heading control can be achieved by adjusting the rudder angle, however, ships are usually exposed to wave-induced disturbances, which inevitably leads to heading angle deviation and frequent regulation of the rudder angle. To achieve precise heading control, some useful results have been proposed, see, for example, Xia and Yang (Citation2019), Wang and Han (Citation2016), Zhen and Jing (Citation2012), Lv et al. (Citation2019), Li and Zhao (Citation2016), X. Wang et al. (Citation2016), R. Wang et al. (Citation2016) and Xia and Yang (Citation2019). Particularly, in Xia and Yang (Citation2019), a heading controller was designed based on predictive functions to address the constrained control problem of surface unmanned ships. In Wang and Han (Citation2016), a heading controller was designed to address the problem of rudder oscillation reduction. In Zhen and Jing (Citation2012), a heading control algorithm was proposed to satisfy the state constraints in the presence of environmental disturbances. In Lv et al. (Citation2019), a hybrid coordination control method was proposed to address the problem of heading control. In Li and Zhao (Citation2016), a neural network (NN) based heading controller was presented to guarantee the stability of the course control system. Nevertheless, it is worth noting that the above mentioned results (Li & Zhao, Citation2016; Lv et al., Citation2019; R. Wang et al., Citation2016; X. Wang et al., Citation2016; Wang & Han, Citation2016; Xia & Yang, Citation2019; Zhen & Jing, Citation2012) are totally dependent on the ship autopilot, which in practice, may not be desirable, especially in the presence of actuator anomalies.
Recently, to address this issue, an approach called shared control was proposed, in particular, a human pilot is introduced to deal with actuator anomalies, and thus the capability of the maritime autonomous surface ships (MASSs) can be significantly expanded (Alexander et al., Citation2012; Batrice et al., Citation2019; Bhardwaj et al., Citation2020; Farjadian et al., Citation2017, Citation2020; Farley et al., Citation2015; Hess, Citation2012, Citation2016; Li et al., Citation2018, Citation2019; Liu et al., Citation2020; Nguyen et al., Citation2017; Taylor et al., Citation2007; Tian et al., Citation2020). For example, in Hess (Citation2016), a shared integration structure was designed for human-supervisors to complete more complex tasks. In Farjadian et al. (Citation2020), a supervisory control architecture that includes the actions of both human pilot and autopilot was proposed to ensure higher tracking accuracy. In Li et al. (Citation2018), a shared human-assistance control system based on the driving intention identification and situation assessment was proposed to avoid obstacles. In Nguyen et al. (Citation2017), a shared control method for lane keeping assist systems was proposed to avoid or minimize the conflict situations. Despite the efforts in the past decades, there have been few results on shared control of the MASS, which motivates this work.
This article is concerned with the shared control problem of MASSs, in particular, actuator anomalies and input constraints are taken into consideration. A cooperative shared control architecture is proposed to assure safe and steady tracking, where the ship autopilot is responsible for tracking instructions, and the human pilot perceives actuator efficiency based on experience and logical reasoning. The main contributions are that the proposed approach offers a feasible and effective solution to prevent actuator saturation and ensures a smooth tracking performance even with constraints on the control effort. Through human-machine shared control, the human pilot would provide superior instructions of anomaly detection and perception, and assign control tasks to the ship autopilot. As a consequence, the capability of the MASS can be significantly expanded, especially for the case with actuator anomalies. Stability analysis shows that the tracking error is ultimately bounded, and all the signals of the closed-loop system remain bounded. Compared with the existing literature, the features of the proposed shared control architecture are summarized into the following three aspects:
First, in contrast to the traditional heading control approaches for MASSs (Trybus et al., Citation2015; Xia & Luan, Citation2015; Zhang & Zhang, Citation2016), a modified model reference adaptive control approach is introduced to achieve high accurate tracking by scaling the time-varying command signal, which can guarantee not only the robustness of closed-loop system under the environment disturbances but also a smooth transient effect.
Second, in contrast to the existing works on heading control of unmanned surface vehicles under actuator anomalies (Wang & Han, Citation2016; Xia & Yang, Citation2019; Zhen & Jing, Citation2012), where the inherent physical limitations of the MASS, such as the rudder saturation, are not taken into consideration. A novel method with μ-mod limited algorithm is proposed to eliminate the control deficiencies caused by high gain inputs, which ensures that the heading system can get rid of the influence of control saturation during the adaptation process.
Third, in contrast to the existing shared control methods (Alexander et al., Citation2012; Bhardwaj et al., Citation2020; Farjadian et al., Citation2017; Hess, Citation2016), a decision-making module of MASSs is proposed for anomaly estimation and monitoring assessment. The human pilot detects anomalies and perceives control effective coefficient based on practical experience, which significantly improves the accuracy of instruction tracking and augments the ability of ship autopilot compared to entirely automated tracking.
The remainder of this article is organized as follows. Section 2 formulates the shared control problem under actuator anomalies. Section 3 presents the proposed shared control architecture and provides the stability analysis of the closed-loop control system. Section 4 presents the simulation results. Finally, Section 5 concludes this article.
2. Problem formulation
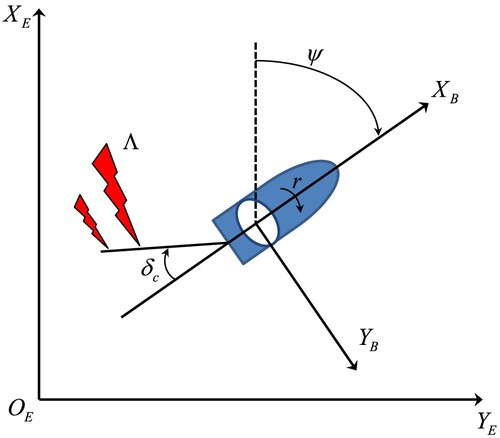
Consider the reference frames of the MASS, as shown in Figure . According to Zhang et al. (Citation2020), Liu et al. (Citation2016) and Liu (Citation2021), the yaw dynamics of the ship can be described as
(1)
(1) where ψ is the heading angle, r is the yaw rate,
is the actuator angle,
represents the control effective coefficient of the actuator. In what follows, it is assumed that
represents a complete failure of the corresponding actuator,
represents a certain degree of effectiveness, and
denotes a healthy actuator. K and T are hydrodynamic coefficients.
is an unknown nonlinear function of r. Inspired by Peng et al. (Citation2016), the nonlinearity
is assumed to satisfy
(2)
(2) with
,
,
,
being unknown constants.
Figure 1. Reference frames.
Define the following matrices
(3)
(3) and the yaw dynamics (Equation1
(1)
(1) ) can be expressed as
(4)
(4) where s is the state vector, u is the shared control input, A is a Hurwitz matrix, B is the input matrix, and
is a continuous function used to represent the uncertain nonlinearity.
Motivated by Wang et al. (Citation2021), Li and Tong (Citation2018), Li et al. (Citation2020), Dong et al. (Citation2017) and Li and Tong (Citation2017), to deal with the unknown nonlinearity , a Radial Basis Function (RBF) neural network is used to approximate the unknown nonlinear function in (Equation4
(4)
(4) ). Given arbitrary
and an arbitrary compact set
, there exists a positive integer m such that for arbitrary continuous function
(5)
(5) where
is a vector of unknown constant,
is a vector of radial basis function,
is the approximation error between the ideal approximation value and actual function value.
Define a closed-loop reference model
(6)
(6) where
represents the state of the reference model,
represents the reference matrix for system state,
represents the reference matrix for system input.
is the given uniformly bounded continuous input, and is assumed to satisfy
with
being the maximum amplitude of the reference signal.
denotes the tracking error.
represents the gain matrix, and is assumed to satisfy the following Lyapunov equation
(7)
(7) where Q>0, and
is the solution of the Lyapunov equation.
The control objective of this paper is to design an adaptive controller u, such that the system state s can track a reference signal despite the unstructured, unknown nonlinearity
, and all the signals of the closed-loop system remain bounded.
To move on, the following assumption is made.
Assumption 2.1
Reference model matching conditions
There exist
and
such that the following equations hold:
and
.
3. Shared control architecture design
In this section, a shared control architecture is proposed for MASSs to assure safe and steady tracking, which expands the ability of MASSs to deal with the problem under actuator failure.
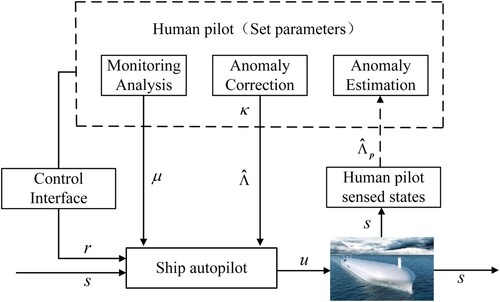
First of all, the shared control framework we proposed is shown in Figure , which combines the actions of a human pilot and a ship autopilot. In the proposed shared control architecture, the human pilot is responsible for high-level decision making such as anomaly estimation, anomaly correction and monitoring analysis, and the ship autopilot is responsible for a low-level task of command following.
Figure 2. The shared control architecture of MASS.
In what follows, the shared controller design and the stability analysis of the closed-loop system will be conducted.
3.1. Shared controller design
In practice, is saturated and modelled as
(8)
(8) where
is the control input to be determined by the shared control architecture,
represents the maximum amplitude of saturation limit.
represents the sign function.
represents the saturation function.
In addition to the hard-limit imposed on the control input u as in (Equation8(8)
(8) ), a virtual limit
is introduced on the control input as follows
(9)
(9) and
(10)
(10) where
is a design parameter, which can be viewed as a protection against the saturating actuator.
is a known bound, and
represents the virtual saturation limit.
is an adaptive control input to be given later. It can be seen from (Equation9
(9)
(9) ) that under the condition
, the magnitude of shared control input u will decrease and move towards
by increasing μ, which guarantees that the shared control input u can be kept within the region
.
The adaptive controller is designed as
(11)
(11) where
represents the feedback adaptive parameter,
represents the feedforward adaptive parameter, which is used to fix the heading command
,
represents the estimation of W.
The adaptation laws ,
,
are designed, respectively, as
(12)
(12) where
,
,
, and
are the corresponding adaptation gains,
denotes the projection operator (Cao et al., Citation2003; Narendra & Annaswamy, Citation1987; Pomet & Praly, Citation1992), and has the following property:
Property 1. (Liu et al., Citation2019) Given the vectors and
, we have:
(13)
(13) where
is the true value of the parameter
.
3.2. Shared estimation design
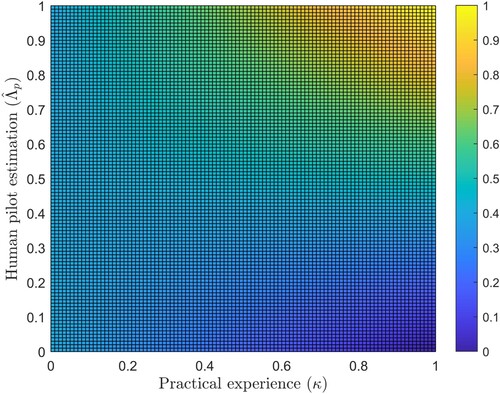
Motivated by Xiong et al. (Citation2017), Li and Zhao (Citation2017), Flemisch et al. (Citation2016) and Bencloucif et al. (Citation2019), a decision-making module of ship actuator malfunction is considered as
(14)
(14) where
denotes the shared estimation of the actuator's control effective coefficient, κ indicates the practical experience of the human supervisor and satisfies
.
represents the human pilots estimation of actuator efficiency.
denotes the nominal value of actuator efficiency.
An elementary component of the shared control framework is the human pilot input , as illustrated in Figure . It is worth noting that the proposed module (Equation14
(14)
(14) ) mostly (or completely) depends on the nominal value of actuator efficiency if only poor (or ineffective) experience can be obtained from the human pilot. On the contrary, better experience can make the human pilot get higher weight, and the decision-making module delivers a shared estimation exactly equal to the human pilot's estimation if
.
Figure 3. Human pilot input.
The choice of the reference model parameters is shown as follows: the shared controller in (Equation8(8)
(8) )–(Equation12
(12)
(12) ) requires the reference model parameters
,
and the control parameters
,
and
at t = 0. If no anomalies occur, one has that
, which implies that
and
as well as the control parameters can be chosen as
(15)
(15) Once anomalies occur at
, where
is the time instant when anomalies occur. Suppose that the estimation
is available, the similar choice in (Equation15
(15)
(15) ) can be updated as
(16)
(16)
3.3. Error dynamics
According to (Equation8(8)
(8) ) and (Equation9
(9)
(9) ), the yaw dynamics (Equation4
(4)
(4) ) can be rewritten into the following form
(17)
(17) where Δ represents a correction to the reference command due to input saturation, and is chosen as
(18)
(18) Correspondingly, the following modified adaptive reference model dynamic is considered,
(19)
(19) Let the tracking error signal be
(20)
(20) Then the tracking error dynamics can be written as
(21)
(21) Substituting (Equation11
(11)
(11) ) into (Equation21
(21)
(21) ), the following closed-loop system is obtained,
(22)
(22) where
,
,
, and
denote the approximation errors. According to Assumption 1, the parameter vectors
,
,
satisfy the reference model matching conditions.
Then one has
(23)
(23)
3.4. Stability analysis
Theorem 3.1
Consider the yaw dynamics of the MASS (Equation1(1)
(1) ) under the Assumption 2.1. Then, with the proposed controller (Equation11
(11)
(11) ) and the adaptation laws (Equation12
(12)
(12) ), the tracking error e is ultimately bounded, and all the signals of the closed-loop system remain bounded.
Proof.
The tracking error dynamics has been given in (Equation23(23)
(23) ). If the control deficiency signal
, we construct the following Lyapunov function
(24)
(24) Taking the time derivative of the Lyapunov function in (Equation24
(24)
(24) ) along the system trajectories (Equation12
(12)
(12) ) and (Equation23
(23)
(23) ), it leads to
(25)
(25) According to the vector trace identity
, which is valid for any two column vectors a and b, one has that
(26)
(26) Substituting (Equation26
(26)
(26) ) into (Equation25
(25)
(25) ) yields
(27)
(27) Substituting the adaptation laws (Equation12
(12)
(12) ) into (Equation27
(27)
(27) ) and using Property 1, one has that
(28)
(28) Consequently,
, whenever the trajectory of e is outside the set
(29)
(29) Thus, one has that the tracking error e is ultimately bounded, and the boundedness of all the adaptive parameters is ensured by the
operator(Lewis, Citation2010).
If the control deficiency signal , the error dynamics (Equation23
(23)
(23) ) degenerates into the following form
(30)
(30) Construct the Lyapunov function of the following form,
(31)
(31) Similar to the proof before, one has that
(32)
(32) which in turn means the tracking error e is ultimately bounded, and the projection operator ensures the boundedness of all adaptive signals.
The proof is completed.
4. A simulation example
In this section, the effectiveness of the main result is demonstrated by a simulation example. To testify the effectiveness of the proposed controller, the control effective coefficient Λ in (Equation1(1)
(1) ) is set as follows
(33)
(33) where
. The designed rates of the adaption laws are set as
,
,
,
, respectively. The parameters of the virtual saturation limit are set as
,
. The confidence of human pilot is set as
. The hydrodynamic coefficients are set as K = 0.12, T = 0.378. The initial values are set as:
,
,
.
The simulation results are given in Figures . Figure depicts the estimated and the actual effectiveness coefficient of the actuator, respectively. Figure depicts the tracking performance of the heading angle by the proposed shared control as well as the conventional model reference adaptive control (MRAC). In MRAC, it indicates that the presence of input constraints will generally lead to instability with large transient errors or oscillations, which means that the stability of the heading control system will severely deteriorate. In contrast, the shared control method indicates that precise tracking of the heading angle can be achieved, and the heading angle can be resumed rapidly after the correction operation at t = 700 s. Figure depicts the evolution of adaptive parameters. Figure depicts the evolution of the feedback and feedforward adaptive parameters, respectively. Figure depicts the state error of the heading system. Figures and demonstrate that the control input with different values of μ, from which one can see that the control deficiencies caused by high gain inputs can be reduced.
Figure 4. Actuator effectiveness coefficient.
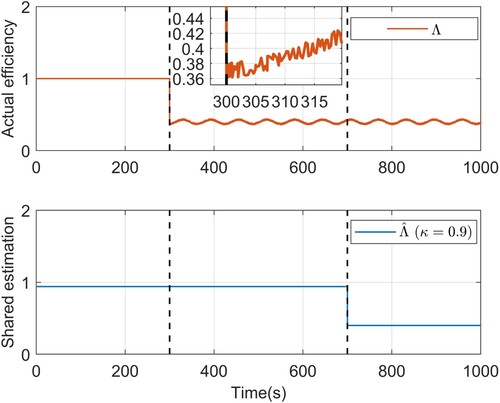
Figure 5. Tracking performance of the heading angle.
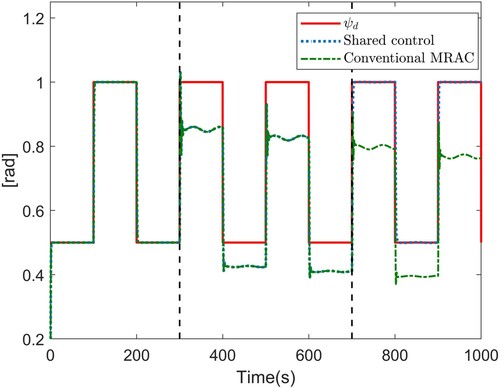
Figure 6. Evolution of adaptive parameters.
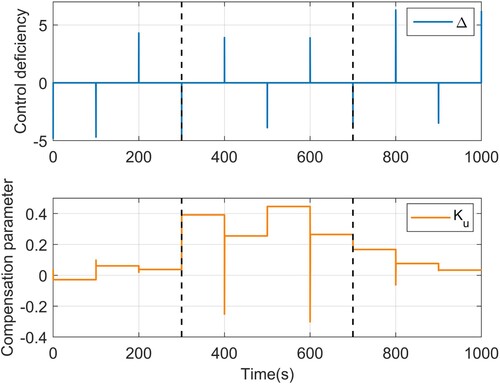
Figure 7. Evolution of adaptive parameters.
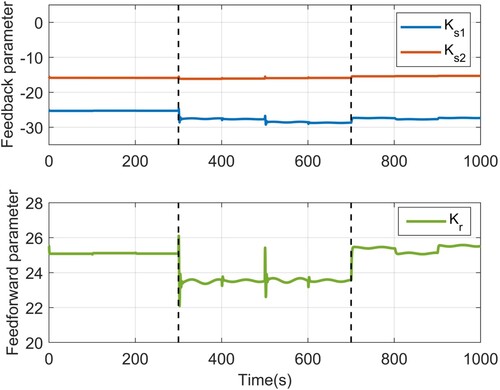
Figure 8. State error of the heading control system.
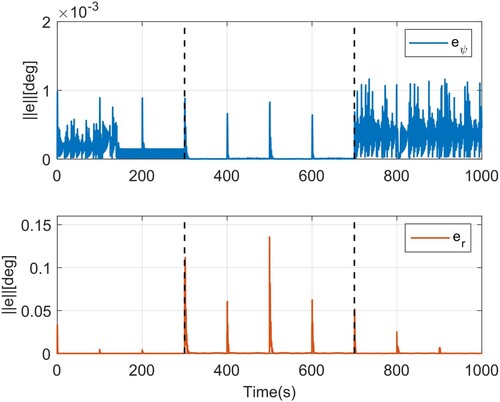
Figure 9. Control input: .
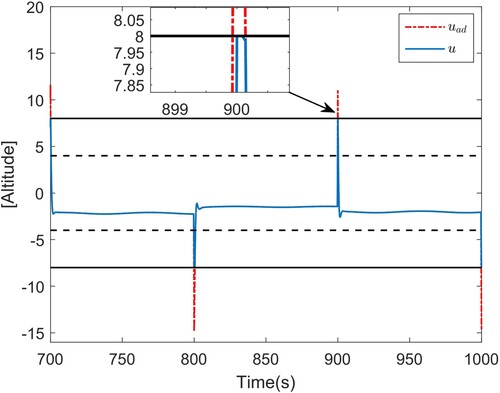
Figure 10. Control input: .
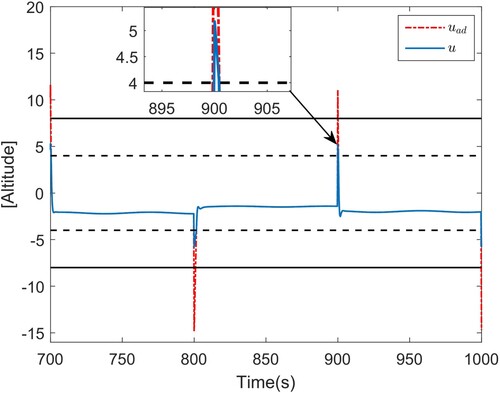
In addition, it can be seen from the simulation results that after the anomalies are introduced at , the control effective coefficient Λ decreased rapidly. During the period
,
overly exceeds
, which causes the heading control system to break down. At
, the human pilot is assumed to provide the first input, which is a compensatory action by increasing μ to 5, the human pilot perceives actuator anomalies and provides the second input
based on practical experience and logical reasoning.
5. Conclusions
This paper investigated the heading control problem of MASSs under actuator anomalies. A shared control architecture was proposed, including a μ-mod limited modification design, as well as a decision-making module design, which provides a novel approach for coordinating human and ships. By using the proposed shared control method, the input saturation problem can be alleviated through establishing virtual boundaries, leading to smooth transient effect and accurate tracking performance. Stability analysis shows that the tracking error is ultimately bounded, and all the signals of the closed-loop system remain bounded. Finally, the effectiveness of proposed shared control architecture is verified by simulation.
Disclosure statement
No potential conflict of interest was reported by the author(s).
Additional information
Funding
References
- Alexander, M., Martin, L., & Ayse, K. (2012). The role of roles: Physical cooperation between humans and robots. The International Journal of Robotics Research, 31(13), 1656–1674. https://doi.org/10.1177/0278364912455366
- Batrice, P., Zhao, Y., Philippe, C., & Fabien, C. (2019). Shared control based on an ecological feedforward and a driver model based feedback. International Federation of Automatic Control, 52(5), 385–392. https://doi.org/10.1016/j.ifacol.2019.09.062
- Bencloucif, A. M., Nguyen, A. T., Sentouh, C., & Popieul, J. C. (2019). Cooperative trajectory planning for haptic shared control between driver and automation in highway driving, shared control and human machine cooperation. IEEE Transactions on Industrial Electronics, 66(12), 9846–9857. https://doi.org/10.1109/TIE.41
- Bhardwaj, A., Ghasemi, A. H., Zheng, Y., Febbo, H., & Gillespie, R. B. (2020). Who's the boss? Arbitrating control authority between a human driver and automation system. Transportation Research Part F Traffic Psychology and Behaviour, 68(1), 144–160. https://doi.org/10.1016/j.trf.2019.12.005
- Cao, C., Annaswamy, A., & Kojic, A. (2003). Parameter convergence in nonlinearly parameterized systems. IEEE Transactions on Automatic Control, 48(6), 397–412. https://doi.org/10.1109/TAC.2003.809146
- Dong, G. W., Li, Y. M., & Tong, S. C. (2017). Adaptive NNs backstepping fault control for a class of nonlinear systems. 2017 36th Chinese Control Conference (CCC) (pp. 7196–7201). https://doi.org/10.23919/ChiCC.2017.8028492.
- Farjadian, A. B., Annaswamy, A. M., & Woods, D. (2017). Bumpless reengagement using shared control between human pilot and adaptive autopilot. IFAC Papersonline, 50(1), 5343–5348. https://doi.org/10.1016/j.ifacol.2017.08.925
- Farjadian, A. B., Thomsen, B., Annaswamy, A. M., & Woods, D. D. (2020). Resilient flight control: An architecture for human supervision of automation. IEEE Transactions on Control Systems Technology, 5(99), 1–14. https://doi.org/10.1109/TCST.2019.2959542
- Farley, T. C., Hansman, R. J., Amonlirdviman, K., & Endsley, M. R. (2015). Shared information between pilots and controllers in tactical air traffic control. Journal of Guidance Control Dynamics, 23(5), 826–836. https://doi.org/10.2514/2.4644
- Flemisch, F. A., Itoh, M., & Pierre, M. (2016). Shared control is the sharp end of cooperation: Towards a common framework of joint action, shared control and human machine cooperation. IFAC PapersOnline, 49(19), 72–77. https://doi.org/10.1016/j.ifacol.2016.10.464
- Hess, R. A. (2012). Modeling pilot control behavior with sudden changes in vehicle dynamics. Journal of Aircraft, 46(5), 1584–1592. https://doi.org/10.2514/1.41215
- Hess, R. A. (2016). Modeling human pilot adaptation to flight control anomalies and changing task demands. Journal of Guidance Control and Dynamics, 39(3), 655–666. https://doi.org/10.2514/1.G001303
- Lewis, F. L. (2010). Nonlinear network structures for feedback control. Asian Journal of Control, 1(4), 205–228. https://doi.org/10.1111/asjc.1999.1.issue-4
- Li, C., & Zhao, Y. (2016). Adaptive radial basis function neural network control for unmanned surface vessel course tracking. International Conference on Information Science and Technology, 285–290. https://doi.org/10.1109/ICIST.2016.7483425
- Li, M., Cao, H., Song, X., Huang, Y., Wang, J., & Zhi, H. (2018). Shared control driver assistance system based on driving intention and situation assessment. IEEE Transactions on Industrial Informatics, 14(11), 4982–4994. https://doi.org/10.1109/TII.2018.2865105
- Li, M., Song, X., Cao, H., Wang, J., Huang, Y., Hu, C., & Wang, H. (2019). Shared control with a novel dynamic authority allocation strategy based on game theory and driving safety field. Mechanical Systems and Signal Processing, 124(1), 199–216. https://doi.org/10.1016/j.ymssp.2019.01.040
- Li, Y. M., Li, K. W., & Tong, S. C. (2020). Adaptive neural network finite-time control for multi-Input and multi-output nonlinear systems with positive powers of odd rational numbers. IEEE Transactions on Neural Networks and Learning Systems, 31(7), 2532–2543. https://doi.org/10.1109/TNNLS.2019.2933409
- Li, Y. M., & Tong, S. C. (2017). Adaptive neural networks decentralized FTC design for nonstrict-feedback nonlinear interconnected large-scale systems against actuator faults. IEEE Transactions on Neural Networks and Learning Systems, 28(11), 2541–2554. https://doi.org/10.1109/TNNLS.2016.2598580
- Li, Y. M., & Tong, S. C. (2018). Adaptive neural networks prescribed performance control design for switched interconnected uncertain nonlinear systems. IEEE Transactions on Neural Networks and Learning Systems, 29(7), 3059–3068. https://doi.org/10.1109/TNNLS.2017.2727140
- Li, Z., & Zhao, S. (2017). Human cooperative wheelchair with brainachine interaction based on shared control strategy. IEEE/ASME Transactions on Mechatronics, 22(1), 185–195. https://doi.org/10.1109/TMECH.2016.2606642
- Liu, J., Guo, H., Song, L., Dai, Q., & Chen, H. (2020). Driver-automation shared steering control for highly automated vehicles. Sciece China. Information Sciences, 63(9), 1–16. https://doi.org/10.1007/s11432-019-2987-x
- Liu, L., Wang, D., Peng, Z., Chen, C. L. P., & Li, T. (2019). Bounded neural network control for target tracking of underactuated autonomous surface vehicles in the presence of uncertain target dynamics. IEEE Transactions on Neural Networks and Learning Systems, 30(4), 1241–1249. https://doi.org/10.1109/TNNLS.2018.2868978
- Liu, L., Wang, D., Peng, Z., & Liu, H. H. T. (2017). Saturated coordinated control of multiple underactuated unmanned surface vehicles over a closed curve. Science China Information Sciences, 60(7), 1–14. https://doi.org/10.1007/s11432-016-9091-8
- Liu, Y., Bu, R. X., Xu, H. J., & Bai, J. (2016). Integral compensation pid and parameter adaptive algorithm of ship course control. Journal of Dalian Maritime University, 42(20), 24–30. https://doi.org/10.16411/j.cnki.issn1006-7736.2016.03.004
- Liu, Z. (2021). Adaptive extended state observer based heading control for surface ships associated with sideslip compensation. Applied Ocean Research, 110(5), 1–10. https://doi.org/10.1016/j.apor.2021.102605
- Lv, C., Yu, H., Chi, J., Xu, T., Zang, H., Jiang, H., & Zhang, Z. (2019). A hybrid coordination controller for speed and heading control of underactuated unmanned surface vehicles system. Ocean Engineering, 176(15), 222–230. https://doi.org/10.1016/j.oceaneng.2019.02.007
- Narendra, K., & Annaswamy, A. (1987). A new adaptive law for robust adaptation without persistent excitation. IEEE Transactions on Automatic Control, 32(2), 134–145. https://doi.org/10.1109/TAC.1987.1104543
- Nguyen, A. T., Sentouh, C., & Popieul, J. C. (2017). Sensor reduction for driver-automation shared steering control via an adaptive authority allocation strategy. IEEE/ASME Transactions on Mechatronics, 23(1), 5–16. https://doi.org/10.1109/TMECH.2017.2698216
- Peng, Z., Gu, N., Zhang, Y., Liu, Y., Wang, D., & Liu, L. (2019). Path-guided time-varying formation control with collision avoidance and connectivity preservation of under-actuated autonomous surface vehicles subject to unknown input gains. Ocean Eningeering, 1(191), 1–10. https://doi.org/10.1016/j.oceaneng.2019.106501
- Peng, Z., Wang, D., & Wang, W (2016). Neural adaptive steering of an unmanned surface vehicle with measurement noises. Neurocomputing, 186(19), 228–234. https://doi.org/10.1016/j.neucom.2015.12.085
- Peng, Z., Wang, J., & Wang, D. (2017). Containment maneuvering of marine surface vehicles with multiple parameterized paths via spatial-temporal decoupling. IEEE/ASME Transactions on Mechatronics, 22(2), 1026–1036. https://doi.org/10.1109/TMECH.2016.2632304
- Peng, Z., Wang, J., Wang, D., & Han, Q. L (2020). An overview of recent advances in coordinated control of multiple autonomous surface vehicles. IEEE Transactions on Industrial Informatics, 172(17), 732–745. https://doi.org/10.1109/TII.2020.3004343
- Pomet, J. B., & Praly, L. (1992). Adaptive nonlinear regulation: Estimation from the lyapunov equation. IEEE Transactions on Automatic Control, 37(6), 729–740. https://doi.org/10.1109/9.256328
- Taylor, J. L., Kennedy, Q., Noda, A., & Yesavage, J. (2007). Pilot age and expertise predict flight simulator performance a 3-year longitudinal study. Neurology, 68(9), 648–654. https://doi.org/10.1212/01.wnl.0000255943.10045.c0
- Tian, Y., Zhao, Y., Shi, Y., Cao, X., & Yu, D. L. (2020). The indirect shared steering control under double loop structure of driver and automation. IEEE/CAA Journal of Automatica Sinica, 7(5), 1403–1416. https://doi.org/10.1109/JAS.2019.1911639
- Trybus, L., wider, Z., & Stec, A. (2015). Tuning rules of conventional and advanced ship autopilot controllers. Advances in Intelligent Systems and Computing, 350(1), 303–311. https://doi.org/10.1007/978-3-319-15796-2
- Wang, R., Zhao, Y., & Miao, K. (2016). Application of neural network minimum parameter learning algorithm in ship's heading tracking control. 2016 9th International Symposium on Computational Intelligence and Design (ISCID) (pp. 135–138). https://doi.org/10.1109/ISCID.2016.38.
- Wang, W., Li, Y. M., & Tong, S. C. (2021). Neural-network-based adaptive event-triggered consensus control of nonstrict-feedback nonlinear systems. IEEE Transactions on Neural Networks and Learning Systems, 32(4), 1750–1764. https://doi.org/10.1109/TNNLS.2020.2991015
- Wang, X., Liu, Z., Li, T. S., & Cai, Y. (2016). Neural network-based adaptive control for a ship course discrete-time nonlinear system. Journal of Harbin Engineering University, 37(1), 123–126. https://doi.org/10.11990/jheu.201410044
- Wang, Y., & Han, Q. (2016). Network-based heading control and rudder oscillation reduction for unmanned surface vehicles. IEEE Transactions on Control Systems Technology, 25(5), 1609–1620. https://doi.org/10.1109/TCST.2016.2617321
- Xia, G., & Luan, T. (2015). Study of ship heading control using rbf neural network. International Journal of Control Automation, 8(10), 227–236. https://doi.org/10.14257/ijca
- Xia, Y., & Yang, T. (2019). Design of surface unmanned ship heading controller based on predictive function control. Ship Electronic Engineering, 39(7),135–138. https://doi.org/10.3969/j.issn.1672-9730.2019.07.014
- Xiong, L., Chng, C. B., Chui, C. K., Yu, P., & Li, Y. (2017). Shared control of a medical robot with haptic guidance. International Journal of Computer Assisted Radiology Surgery, 12(1), 1–11. https://doi.org/10.1007/s11548-016-1425-0
- Zhang, Q., Ding, Z., & Zhang, M. (2020). Adaptive self-regulation pid control of course-keeping for ships. Polish Maritime Research, 27(1), 39–45. https://doi.org/10.2478/pomr-2020-0004
- Zhang, X., & Zhang, G. (2016). Design of ship course-keeping autopilot using a sine function-based nonlinear feedback technique. Journal of Navigation, 69(2), 246–256. https://doi.org/10.1017/S0373463315000612
- Zhen, L., & Jing, S. (2012). Disturbance compensating model predictive control with application to ship heading control. IEEE Transactions on Control Systems Technology, 20(1), 257–265. https://doi.org/10.1109/TCST.2011.2106212